Изобретение относится к области систем автоматического управления, а именно к системам адаптивного управления нестационарными устойчивыми объектами или объектами с неопределенными параметрами.
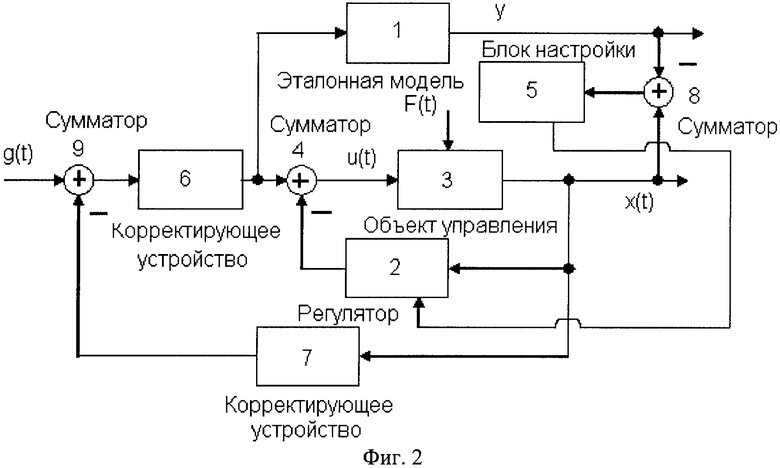
Известна адаптивная система управления, содержащая эталонную модель и последовательно соединенные регулятор, объект управления, сумматор и блок настройки, выход которого соединен с первым входом регулятора, а вход системы соединен с третьим входом блока настройки и через эталонную модель - со вторым входом сумматора [1] (прототип).
К недостаткам прототипа относится малая точность системы управления объекта высокого порядка, т.к. используемые в обратной связи производные входного сигнала определяются с большими ошибками.
С целью повышения точности адаптивной системы управления, содержащей последовательно соединенные регулятор, объект управления, сумматор и блок настройки, выход которого соединен с первым входом регулятора, а вход системы соединен с третьим входом блока настройки и через эталонную модель - со вторым входом сумматора, в ней выход эталонной модели соединен с третьим входом блока настройки и вторым входом регулятора.
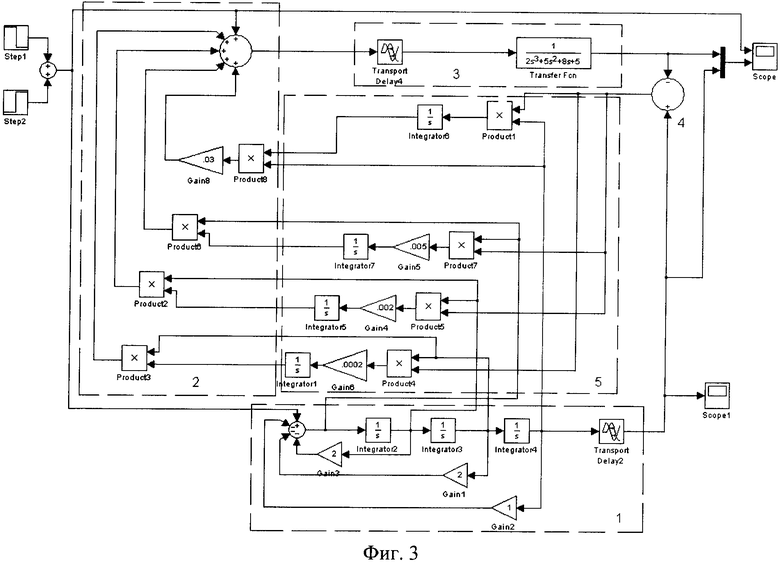
На фиг.1 изображена адаптивная система управления, а на фиг.2 - система-прототип. На фиг.3 и фиг.4 - соответственно - схема системы для моделирования в ЦВМ и переходные процессы на выходах ОУ и ЭМ. На фигурах приняты следующие обозначения: 1 - эталонная модель, 2 - регулятор, 3 - объект управления, 4 - сумматор, 5 - блок настройки, 6, 7 - корректирующие устройства, 8, 9 - сумматоры, на фиг.3 (обозначения, которые общеприняты в Simulink'e Matlab'a) изображена схема фиг.1, промоделированная в Simulink'e, g(t), x(t), y(t), ε(t), u(t) - сигналы соответственно задания, с выхода ОУ, с выхода ЭМ, ошибки и управления, F(t) - мультипликативная помеха, изменяющая коэффициенты ДУ ОУ произвольным образом.
Под объектом управления (ОУ) будем подразумевать так называемый обобщенный объект управления (ООУ), который при аналоговом исполнении адаптивной системы управления содержит последовательно соединенные исполнительное устройство, собственно ОУ и датчик выходной величины x(t). При цифровой реализации адаптивной системы ООУ представляет из себя последовательное соединение преобразователя «код-аналог», исполнительного устройства, ОУ, датчика x(t) и преобразователя «аналог-код».
Функционирует адаптивная система управления на фиг.1 следующим образом. На вход эталонной модели 1 поступает входной сигнал g(t) - сигнал задания для системы. Выход эталонной модели (в общем случае векторный) поступает на входы регулятора 2, блока настройки 5 и сумматора 4. Сигнал с выхода регулятора 2 поступает на вход объекта управления 3. В сумматоре 4 из сигнала y(t) вычитается сигнал x(t) и полученный сигнал ε(t) используется в блоке настройки 5 для формирования параметрического управления  . Последние используются для настройки параметров (коэффициентов) регулятора 2 таким образом, чтобы ошибка ε(t) с течением времени t стремилась к нулю. В результате при ε(t)=0 выходы объекта 3 управления и эталонной модели 1 совпадут, т.е. переходные процессы совпадут. Параметрические управления Δki(t) формируются (синтезируются) на основе второго метода Ляпунова из условия обеспечения устойчивости и желаемого качества переходного процесса.
. Последние используются для настройки параметров (коэффициентов) регулятора 2 таким образом, чтобы ошибка ε(t) с течением времени t стремилась к нулю. В результате при ε(t)=0 выходы объекта 3 управления и эталонной модели 1 совпадут, т.е. переходные процессы совпадут. Параметрические управления Δki(t) формируются (синтезируются) на основе второго метода Ляпунова из условия обеспечения устойчивости и желаемого качества переходного процесса.
Как видно из фиг.3, контур адаптации 5 настраивает в регуляторе 2 пять параметров - один в прямой цепи прохождения сигнала g(t) и четыре в цепи обратной связи.
Переходные процессы на выходах объекта управления 2 и эталонной модели 1 не совпадают: на выходе объекта управления 2 они значительно затянуты, т.к. контурами настройки в виде параметрической обратной связи охватывается звено чистого запаздывания h больше 0. Из [1] известно, что при управлении объектами с чистым запаздыванием по входу нельзя в обратных связях устанавливать большие коэффициенты усиления. Предложенная адаптивная система управления содержит только параметрическую обратную связь (через контура настройки параметров Δki(t)) и не содержит координатной отрицательной обратной связи, т.к. в выражениях Δki(t) содержится не xi(t) в качестве сомножителя, a yi(t). Использование yi(t) вместо xi(t) с одной стороны делает основной контур управления содержащим регулятор 2 и объект управления 3, разомкнутым по x(t) и поэтому синтезированная система пригодна только для управления устойчивыми объектами управления 3. В промышленности большое множество объектов управления, которые устойчивы в разомкнутом состоянии. Но ввиду того что обратная связь параметрическая существует, но без координатной обратной связи, адаптивная система обладает повышенным запасом устойчивости, т.к. значение чистого запаздывания h по входу в объекте управления 3 третьего порядка может меняться от 0 до 100 при постоянных коэффициентах усиления λi в контурах настройки параметров регулятора 2. Важным преимуществом предложенной системы является то, что отпадает необходимость в установке реальных дифференцирующих устройств, т.к. в технике не существует идеальных дифференциаторов. Устранен тем самым и эффект подчеркивания высокочастотных помех, присутствующих обычно на выходе объекта управления 3. Как видно из фиг.3, производные y(i)(t) для формирования Δki(t) берутся с выходов эталонной модели 1, на которую помехи не поступают.
Изобретение обладает изобретательским уровнем, который подтверждается отличительной частью формулы изобретения - в системе выход эталонной модели соединен с третьим входом блока настройки и вторым входом регулятора. Из сопоставления фиг.1 и фиг.3 ясно, что связи между блоками фиг.1 векторные.
В заключение необходимо отметить, что преимущества изобретения наиболее ощутимы по сравнению с прототипом, когда объект управления с запаздыванием по входу и порядок уравнения объекта управления n высок (n>2), т.к. y(i)(t), используемые в законах настройки Δki(t), определяются в эталонной модели точно независимо от их порядка, а кроме того, регулятор 2 не содержит координатной обратной связи по y(t).
Литература
1. Справочник по теории автоматического управления. Под. Ред. А.А.Красовского. - М: Наука, 1987. - 712 с стр.489 (рис 10.4.5).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НЕПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2381539C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |

Изобретение относится к области автоматики и может быть использовано в системах адаптивного управления нестационарными объектами с чистым запаздыванием по входному воздействию. Техническим результатом является повышение устойчивости системы управления. Система прямого адаптивного управления содержит регулятор, объект управления, сумматор, блок настройки и эталонную модель. Выход эталонной модели соединен со входом блока настройки и входом регулятора. 4 ил.
Система прямого адаптивного управления нестационарным объектом с чистым запаздыванием по входу, содержащая последовательно соединенные регулятор, объект управления, сумматор и блок настройки, выход которого соединен с первым входом регулятора, а вход системы соединен с третьим входом блока настройки и через эталонную модель - со вторым входом сумматора, отличающаяся тем, что выход эталонной модели соединен с третьим входом блока настройки и вторым входом регулятора.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| Адаптивная система управления объектами с запаздыванием | 1985 |
|
SU1297009A1 |
| СПОСОБ СТАБИЛИЗАЦИИ УПРУГОГО ЭЛЕМЕНТА ДАТЧИКА ДАВЛЕНИЯ С ТЕНЗОРЕЗИСТОРАМИ ПОД ДАВЛЕНИЕМ | 2009 |
|
RU2399894C1 |
| US 2005149209 A1, 07.07.2005 | |||
| Уточная вилочка для ткацких станков | 1933 |
|
SU37579A1 |
| РОЛЬГАНГОВАЯ ДОРОЖКА | 0 |
|
SU182007A1 |

