1
Изобретение относится к айтоматике и может быть использовано аля автоматичео- . oгo управпевйя аппаратурой, например телескопами установленными на подвижном ооношении.
Известны системы автоматического управления телескопами, установленными в дв осном onopHOrnpBDj OTHOM устройстве на под.вижном основатн t 1 Из взвэстяых систем наиболее близкой к изобретению по ю технической сушноств является система ав томатического управления телескопом, coaei жашая двуосное опорнсн поворотное устройство, внутреш 11я рамка Неоторого механически соединена с телескопом, двукоординатный }S астродатчнк, . механически соединенный с телескопом, первый и второй сумматоры,первы вход первого сумматора соединен с выходом первого тахогегер агора, а выход через первый усилитель с обмоткой управле 20 ния первого двигателя, вал которого механически соединен с валом первого тахогенератора и через редуктор - с внутренней осью опорно-поворотного устройства, первый вход второго сумматора соединен с выходом вто 25
рого тахогенератора, а выход - через второй усилитель с обмоткой управления второго двигателя, вал которого механически соединен с валом второго тахогенератора и через рецуктор - с внешней осью опорно-поворотного устройства f3j. Однако известные системы .не имеют достаточной помехозашй шенноств а связи с тем, что к сигналам, снимаемым с астродатчика, примешай шум, обусловленный как фоновыми засветкамИ|Так и внутренними помехами.
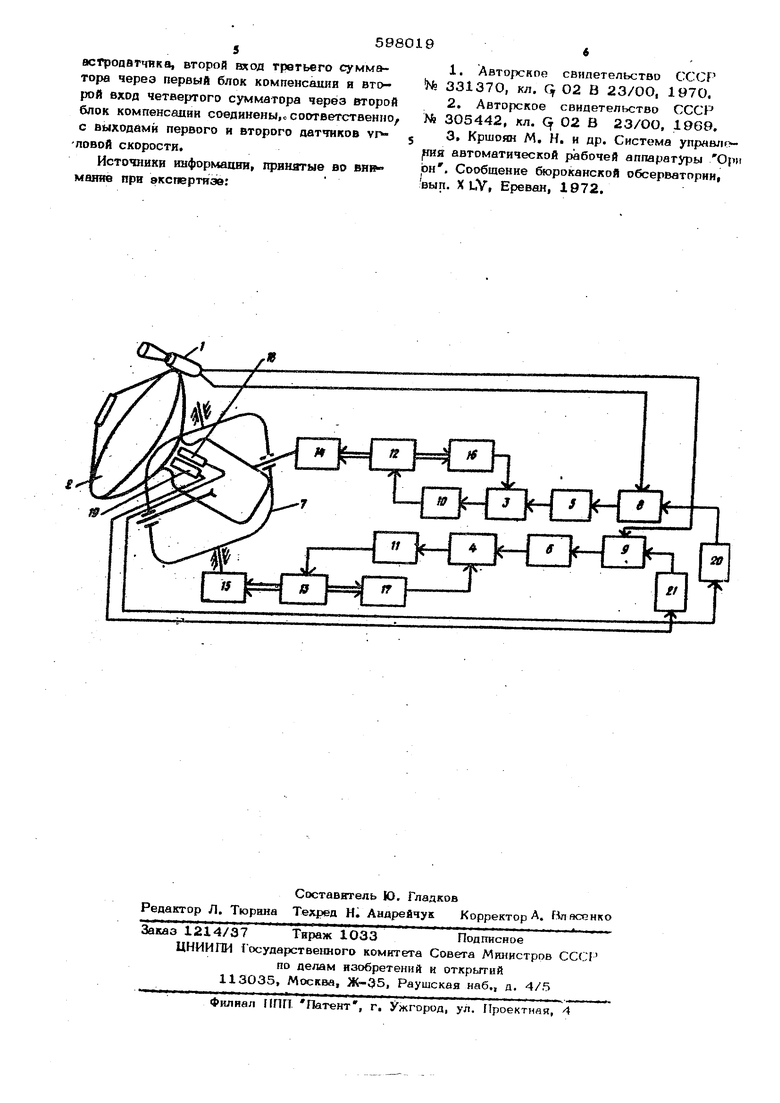
Целью изобретения является повышение помбхозапшшанноста, Вошсываемой системе это достигается тем, что в иее дополнитель но введены третий и четвертый сумма оры, первый и второй бпоки компенсАшт, фильтры низких частот и датчики угловой скорости, механически соединенные с телескопом, причем ось чувствительности первого датчика угловой скорости параллельна оси внутренней рамки onopHo-noBopoT}foro устройства, а ось чувствительности второго датчика угловой скорости параллельна оси внешней , выход третьегч сумматора через первый фильтр низких частот и выхоп четвертого сумматора через второй фильтр низких частот соединены, соответственно, со вторыми входами первого и второго сумматоров, первые входы третьего и четвертого сумматоров соединены, соответственно, с первым к входамвг а ;тродатчпка| второй в}ц}д третьего сумматора через первый блок комшв садни я второй вход четвертого сумматора через второй блох компенсации соединены, со (Ответственно, с выходами первого и второго датчиков угловой скорости. а чертеже 1федставлёна CTpyKTypHaj схема описываемой системы. Система содержит астродатчик 1, тел&скоп 2, первый 3 в второй 4 сумматоры, первый 5 и второй 6 фильтры низких частот, опорно-поворютное устройство 7, третий 8 и четвертый -9 сумматоры, первый Ю и второй 11 усилители, первый 12 и второй 13 двигатели, первый 14 и второй IS редукта ры, первый 16 и второй 17 тахогенераторы, первый 18 и второй 19 датчики угловой скоростиj первый 20 и второй 21 блоки ком пенсации Астродатчик 1, визирная ось которого
раллельиа оси телескопа 2, вырабатывает сигналы, характеризующие составлдащую уЪлов рассогласования между направлением на источник излучения и визирной осью в двух ортогональных плоскостях, проходяшшх через, ЗО ось чyвcтj&итenьнocти системы. Эта сил1а1ы, соответственно, по каждому каналу поступают на первые входы третьего 8 и четвертого 9 сумматоров, а с их выходов - на филь-р, ры 5 и 6 низких частот с передаточной функдией i/fPg,) .где Тф постоянная временн Ультра низких частот. Фильтры низких частот, отфильтровывая шумы астродатчика, ;0бусловленные как фоновыми помехами, так и его внутренйвми шумами, С1овыщак}т отно шение сагнал/шум ва входах усилителей 10 И ll. Отфильтрованные сигналы поступают на входы сяедгадйХ. щ иводов, установленных по каждой оси двуосного опорно поворотного устройст ва 7 которые, поворачивая соотвег. ствующую рамку опорно-поворотного устройства, сводят соста&лаюшне угла рассогласо. ванна к нулю. Каждый следящий привод сос .тоит из последовательно соединенных первого (второго) сумматора .3 (4), усилителя / 1О (11), двигателя 12 (13) и редуктора 14 (15). С другим выходом двигателя соот. BSTCTajfiomero следящего привода механически соединен тахогенератор 16 (17), выход которого соединен со вторым входом первого® (второго) Сумматора 3 (4), так, что обраэу,ет внутреннюю отрицательную обратную связь. На телескопе 2 жестко установлены два да-Ьчика 18 и 19 угловой скорости, ось чувства тольности первого из которых 11араллел на
го механически соединена t телескопом, дву координатный астродатчик, механически сое даненный с телескопоМ| первый и второй сумjviaTopbi, первый вход первого сумматора соеоси внутпенней рамкн, а ось чувствительности, торого - внешней рамки опорно-поворотного устройстга 7. Сигналы с датчиков угловой корости поступают на вход блоков 20 и 21 омпенсации с передаточной функцией Wcwlp) -Tf f (p) - передаточная функция, равная передаточной функции астродатч ка. Сигналы с выходов блоков компенсации поступают, соответственно, на вторые входь) третьего 8 и четвертого 9 сумматоров, koN йенсируя динамическую ошибку фильтрации, которая возникает при отсутствии этой свя аи за счет1зедения фильтра низких частот. Использование описываемой системы nt аволяет в результате повышения помехозащищенности применять ее для сопровождения источников наблюдения в условиях интенси ных световых помех. Формула изобретения Система автоматического управления телескопом, содержащая двуосное опорно-поворотное устройство, внутренняя рамка которо )д;инен с выходом, первого тахогенератора, а выход - через первый усилитель с обмоткой управления первого двигателя, вал которого механически соединен с валом первого тахогенерат ора и через редуктор - с внутренней осью опорно-поворотного устройства, первый вход второго сумматора соединен с выходом второго тахогенератора, а выход - через второй усилитель с обмоткой управления втоppro двигателя, вал которого механически соединен с валом второго тахогенератора и через редуктор - с внешней осью опорво- поворотного устройства, отличающая с я тем что, с целью повышения помехозащищённости системы, она содержит третий g четвертый сумматоры, первый и второй блЕОки компенсации, фильтры низких частот, в датчики угловой скорости, механически соед{шенные с телескопом, причем ось чувствительности первого датчика угловой скорости Вараплепьна оси внутрендай рамки опорно-поворотного устройства, а ось чубствительности второго датчика угловой скорости парал лельна оси внешней рамки, выход третьего сумматора через первый фильтр низких чаотот и выход четвертого сумматора через второй 4мльтр низких частот соединены, соответственно, со вторыми входами первогЪ и второго сумматоров, первые входь третьего и четвертого сумматоров соединены, со- ответсткенно, с первым и вторым Еяопамя
асгроаатчпкв, второй вход третьего сумматора через первый блок компенсации я второй вход четвертого сумматора через второй блок компенсации соединены.соответственно, с выходами первого и второго даттиков vr
-повой скорости.
Источники информаони, првнатые во вн
манне при вкспертяэв:
1.У вторское свипетельство СССР . 331370, кл. Q 02 В 23/ОО, 1970.
2.Авторское свндетельство СССК А 305442, кл. Ц 02 В 23/ОО, 1969,
3.Кршоян М. Н. и др. Система упр«влг fma автоматической р1абочей аппаратуры Ори он . Сообщение бюроканской обсерватории, -вып. X L,V, Ереван, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Система для астроориентации телескопа | 1976 |
|
SU648954A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Двухканальная следящая система | 1984 |
|
SU1193636A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
