го привода; на фиг. 2, а и б даны графики работы кналов и привода, где приняты следующие обозначения; вь Qz - соответственно .входная и выходная величины привода; QI, QI, Йн - скорости соответственно управляемого канала, опорного канала, нагрузки; Uy, UQI, ,(7о2 - напряжения на выходе предварительного усилителя, блока опорных сигналов; в - ошибка следящего привода.
Предлагаемый привод состоит из первого канала 1, содержащего последовательно соедипенпые первый усилитель 2 мощности и первый двигатель 3, и второго канала 4, содержащего последовательно соединенные второй усилитель 5 мощности и второй двигатель 6, выходы которых соединены соответственно с первым и вторым входами механического дифференциала 7. Выход дифференциала через последовательно соединенные редуктор 8 и нагрузку 9 соединен с вторым входом чувствительного элемента 10, -первый вход которого соединен с входом лривода, а выход с входами предварительпого усилителя 11 и логического устройства 12.
Выход логического устройства 12 соединен с первыми входами первого 13 и второго 14 ключей, вторые входы которых соедипены соответственно с первым и вторым входами блока 15 опорных сигналов, а выходы - соответственно с вторыми входами каналов 1, 4, лервые входы которых соединены с выходом лредварительного усилителя 11. Второй и третий входы логического устройства 12 соответственно соединены с выходами первого и второго измерителей 16, 17 скорости, входы которых соединены с выходами каналов 1, 4.
Работа привода заключается в следующем.
При отсутствии на входе следящего привода входного сигнала ошибка в мала, ключи 13, 14 подают на вход каналов 1, 2 сигналы с блока 15. Двигатели 3, 6 каналов 1, 4 под действием сигналов оь с блока 15 вращаются в противоноложные стороны с равными скоростями Qj, Q., выходной вал дифференциала 7 неподвижен, скорость QII равна нулю. Сигналы боь t/oa на выходе ключей 13, 14 таковы, что скорости йь Q/ равны половине номинальной скорости двигателей 3, 6.
В режимах слежения, так ка-к при отработке скоростей и ускорения изменения входной величины Q,(t) под действием рассогласования e(i), а следовательно, и сигнала t/y, усиленного усилителями 2, 5, а также опорных сигналов t/oi t/o2, двигатели 3, 6 развивают пропорциональные скорости, т. е. на нагрузке 9 имеет место удвоенное изменение скорости и ускорения по сравнению с изменением этих величин за тот же интервал времени в однодвигательном приводе,
В режимах отработки больщих рассогласований по сигналу ошибки 0 и сигналом с измерителей 16, 17 скорости срабатывает логическое устройство 12, которое управляет с помощью ключей 13, 14 опорными сигналами f/ob таким образом, чтобы обеспечить отработку больших углов рассогласования за минимальное время.
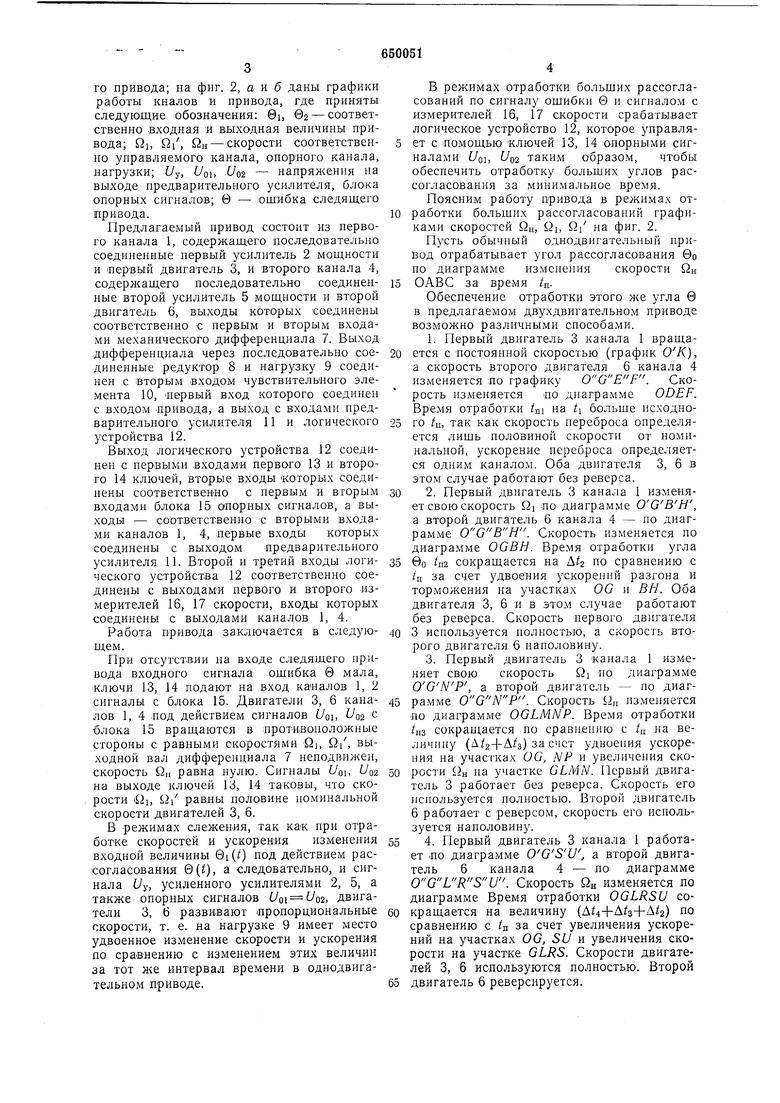
Поясним работу привода в режимах отработки больших рассогласований графиками скоростей Он, йь 3/ на фиг. 2.
Пусть обычный однодвигательный приВод отрабатывает угол рассогласования во но диаграмме изменения скорости QH ОАВС за время /пОбеспечение отработки этого же угла в в предлагаемом двухдвигательном приводе возможно различными способами.
1. Первый двигатель 3 канала 1 вращается с постоянной скоростью (график ОК), а скорость второго двигателя 6 канала 4 изменяется :по графику . Скорость изменяется но диаграмме ODEF. Время отработки /щ на /i больше исходного /II, так как скорость нереброса определяется лишь половиной скорости от номинальной, ускорение переброса определяется одним каналом, Оба двигателя 3, 6 в этом случае работают без реверса. 2. Первый двигатель 3 канала 1 изменяет свою скорость Й1 по диаграмме OGBH, а второй двигатель 6 канала 4 - по диаграмме . Скорость изменяется по диаграмме OGBH. Время отработки угла во /п2 сокращается на Д/2 по сравнению с /II за счет удвоения ускорений разгона и торможения на участках 00 и ВН, Оба двигателя 3, 6 и в этом случае работают без реверса. Скорость первого двигателя 3 используется иолностью, а скорость второго двигателя 6 наполовину.
3. Первый двигатель 3 канала 1 изменяет свою скорость Й1 по диаграмме OGNP, а второй двигатель - но диаграмме . Скорость (2ц изменяется по диаграмме OGLMNP. Время отработки /„3 сокращается по сравнению с /ц на величину (Д/2+Д4) за счет удвоения ускорения на участках ОС, NP и увеличения скорости QH па участке GLMN. Первый двигатель 3 работает без реверса. Скорость его используется полностью. Второй двигатель 6 работает с реверсом, скорость его используется наполовину.
4. Первый двигатель 3 канала 1 работает ло диаграмме OGSU, а второй двигатель 6 канала 4 - по диаграмме . Скорость Йн изменяется по диаграмме Время отработки OGLRSU сокращается на величину (А/4+А/з+А 2) по сравнению с /л за счет увеличения ускорений на участках OG, SU и увеличения скорости на участке GLRS. Скорости двигателей 3, 6 используются полностью. Второй двигатель 6 реверсируется.
При отработке угла во другого знака работа двигателей 3, 6 аналогична, только диаграммы работы изменяются местами и знаками.
Из анализа графиков и работы двигателей 3, 6 в различных режимах видно, что для обеспечения минимального времени отработки ta задаваемого угла рассогласования во логическое устройство 12 и ключи 13, 14 должны работать по следующему алгоритму.
Логическое устройство 12 оценивает значение и знак рассогласования 0 для формирования того или иного вида диаграммы работы лривода в целом за счет формирования диаграмм работы каналов 1, 4. Чем больше рассогласование во, тем больше опорный сигнал UQ с помошью ключей 13, 14 должен Подаваться на соответствующий канал.
Логическое устройство 12 оценивает по данным с измерителей 16, 17 скоростей и ошибке в моменты R, М, S, N, В начала торможения соответствующих двигателей 3, 6, для чего опять тот или инойуровень и знак f/o формируется с помощью ключей 13, 14.
Измерители 16, 17 скорости в частном случае являются тахогенераторами. Логическое устройство 12 представляет собой пороговое устройство по в, управляемое сигналами с измерителей 16, 17.
Технико-экономический эффект предложенного решения заключается в том, что за счет сравнительно простой реализации логического устройства, двух ключей, двух измерителей скорости и ввода дополнительной связи между предварительным усилителем и усилителем мощности опорного (второго) канала обеспечивается увеличение быстродействия привода в режимах слежения и переброса, расширение диапазона регулирования скорости за счет максимального ее значения в режимах отработки больших углов рассогласования (режим переброса).
Формула изобретен и я
Двухдвигательный следящий привод, содержащий блок опорных сигналов, последовательно соединенные первый усилитель мощности и первый двигатель, последовательно соединенные второй усилитель мощности и второй двигатель, вы.ходы двигателей соединены с входами дифференциала, выход которого через последовательно соединенные редуктор, нагрузку, чувствительный элемент и предварительный усилитель соединен с первым входом первого усилителя мощности, отличающийся тем, что, с целью повышения быстродействия и расширения диапазона регулирования скорости привода, в пего дополнительно введены логическое устройства, два ключа и два измерителя скорости, первый вход логического устройства соединен с выходом чувствительного элемента, второй
вход - с выходом первого измерителя скорости, третий вход - с выходом второго измерителя скорости, а выход - с первыми входами первого и второго ключей, вторые входы которых соединены с выходами блока опорных сигналов, а выходы - с вторыми входами соответственно, первого п второго усилителей мощностп, входы первого и второго измерителей скорости соединены соответственно с выходами первого
и второго двигателей, первый вход второго усилителя мощности соединен с выходом предварительного усилителя.
Источники информации, принятые во внимание При экспертизе
1. Авторское свидетельство СССР № 416659, кл. G 05В 11/01, 1971.
2. Авторское свидетельство СССР № 407278, кл. G 05В 11/26, 1971.
;-

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Двухканальный следящий привод | 1974 |
|
SU515083A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Двухканальный следящий привод | 1975 |
|
SU579596A1 |

