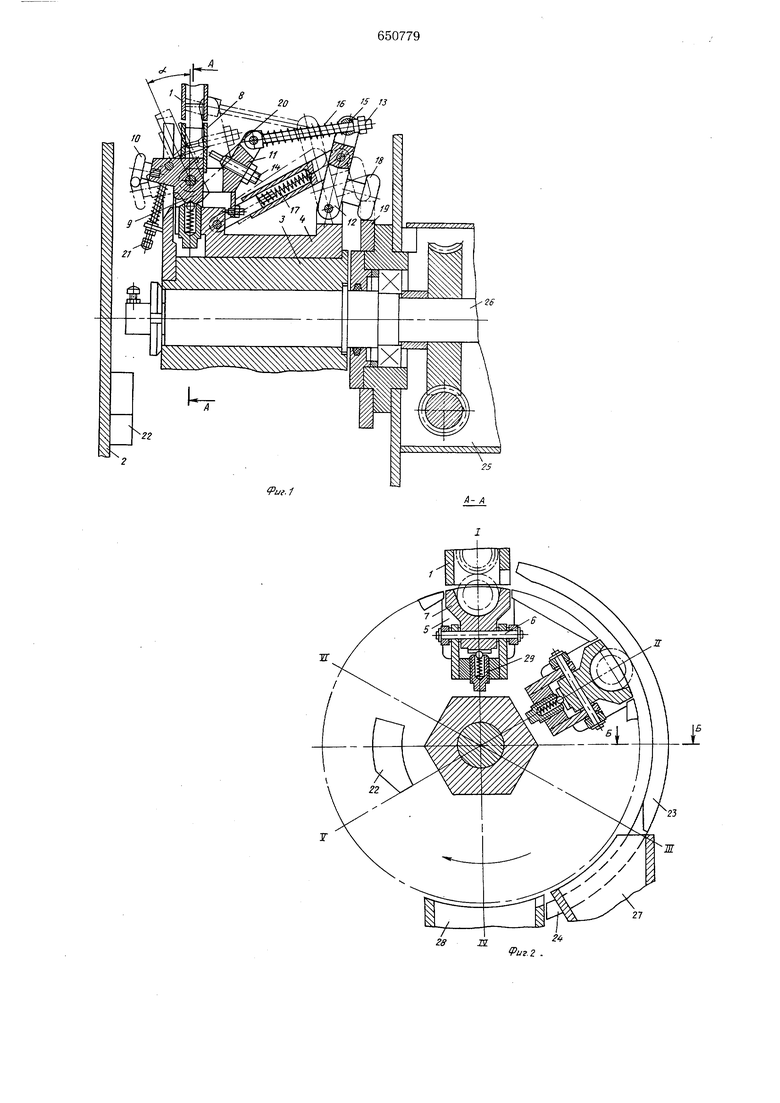
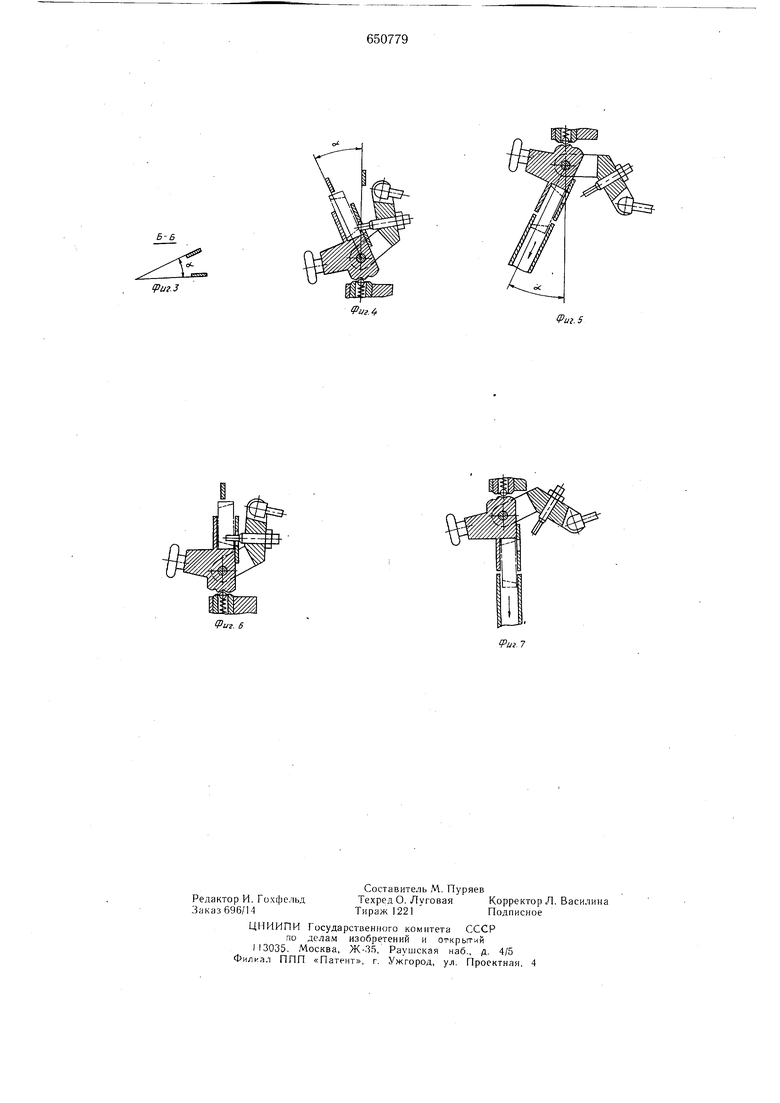
чагами 12 с помощью шпилек 13, пальцев 14 и поворотных пальцев 15. Рычаги 12 подпружинены спиральными пружинами 16 и 17 и снабжены роликами 18, взаимодействующими с установленной неподвижно в корпусе 2 кулачковой шайбой 19. На рычагах 11 установлепы щупы 20. Рычаги 9 захватов 7 имеют регулируемые подпружиненные упоры 21. В корпусе 2 неподвижно закреплены кулачок 22 и дугообразные направляющие 23 и 24, расположенные под углом а друг к другу, равным углу наклона захватов 7 (фиг. 3 и 1). Вращение диска 4 осуществляется от электродвигателя через редуктор 25, вал 26 и призму 3. По окружности снаружи корпуса 2 размещены приемные лотки 27 и 28. Для фиксации захватов 7 на диске 4 служат подпружиненные регулируемые шариковые фиксаторы 29. Устройство ориентации деталей работает следующим образом. В движущиеся по окружности захваты 7 из подводящего лотка 1 поступают детали, например кольца конических роликоподшипников. Во время движения захватов по окружности на участке I-II .(фиг. 2) ролики 18 обкатываются по кулачковой шайбе 19 и поворачивают рычаги 12, которые с помощью шпильки 13 и пружины 14 осуществляют поворот вокруг оси 6 рычагов 11. Щуп 20, укрепленный на каждом из рычагов II, входит в отверстие 8, выполненное в захвате 7. При этом возможны два случая, которые определяются расположением торцов наружных или внутренних колец конических роликоподшипников относительно отверстия в захвате. В первом случае кольцо в захвате 7 расположено широким торцом к отверстию 8, перекрывая его (фиг. 1, 5). Во втором случае кольцо в захвате 7 расположено узким торцом к отверстию 8, не перекрывая его. Таким образом, в первом случае входящий в отверстие 8 щуп 20 упрется своим концом в торец кольца и начнет поворачивать захват 7 с кольцом вокруг оси 6 в плоскости, проходящей через ось вращения диска, на угол а . Новое положение захвата 7 с кольцом фиксируется шариком фиксатора 24 (фиг. 1, 2, 4, 5). Во втором случае входящий в отверстие щуп проходит свободно и не задевает за торец кольца. При этом захват с кольцом остается при своем движении в первоначальном положении (фиг. 1, 6, 7). При движении по кругу на участке II-III происходит возврат рычага 11 со щупом 20 в исходное положение, а кольца в захватах поддерживаются дугообразными направляющими 23 и 24, расположенными в корпусе под углом а друг к другу, равным углу наклона захватов. Далее при движении по кругу на участке III-IV осуществляется выгрузка кольца из захвата в соответствующий отводящий лоток 27 или 28 (фиг. 2, 5, 7). На участкеУ -V наклоненные захваты с помощью рычага 9 и ролика 10, обкатывающегося по кулачку 22, и пружины упора 21 возвращаются в исходное положение для ИХ загрузки. Процесс загрузки захватов деталями, ориентации идет непрерывно при постоянном вращении диска с захватами. Предлагаемое устройство обеспечивает надежную ориентацию деталей с разной площадью торцов. С помощью него возможно осуществлять ориентацию таких деталей, как кольца шарикоподшипников и цилиндрических роликоподшипников, кольца конических и карданных подщипников, а также изделий с глухими отверстиями, канавками, уступами, вырезами и т. д. Формула изобретения Устройство для ориентации деталей, содержащее установленный в корпусе вращающийся в вертикальной плоскости диск, снабженный расположенными в его радиальных гнездах захватами деталей, несущими рычаги с роликами и имеющими отверстия для захода щупов, и неподвижно укрепленные на корпусе дугообразные направляющие, отличающееся тем, что, с целью обеспечения ориентации деталей с разной площадью торцов, каждый захват установлен на оси с возможностью наклона в плоскости, проходящей через ось вращения диска, причем щупы закреплены на рычагах, установленных с возможностью поворота на указанных осях, а дугообразные направляющие рарположены под углом друг к другу, равным углу наклона захватов.Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 444623, кл. В 23 Q 7/02, 1973.
б f 3
ue.f
25
A- A
Ж
27
г
Риг. 2 .
В-Б
Риг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки внутреннего блока конического роликоподшипника | 1953 |
|
SU121712A1 |
| Автомат для сборки конических подшипников | 1990 |
|
SU1787226A3 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОЛЕЦ С КОНИЧЕСКИМ ОТВЕРСТИЕМ | 1992 |
|
RU2008165C1 |
| Устройство для ориентирования деталей | 1978 |
|
SU751574A1 |
| Устройство для автоматической сварки | 1982 |
|
SU1058753A1 |
| Автомат для сборки конических роликоподшипников | 1976 |
|
SU654810A1 |
| УСТРОЙСТВО ДЛЯ ПАКЕТИРОВАНИЯ ДЕТАЛЕЙКС^л.Хмш:-'1-'^^ | 1972 |
|
SU323174A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ НА БОРТОВОЕ КОЛЬЦО ШИНЫ И СПОСОБ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ | 1997 |
|
RU2177879C2 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
Риг. 6
