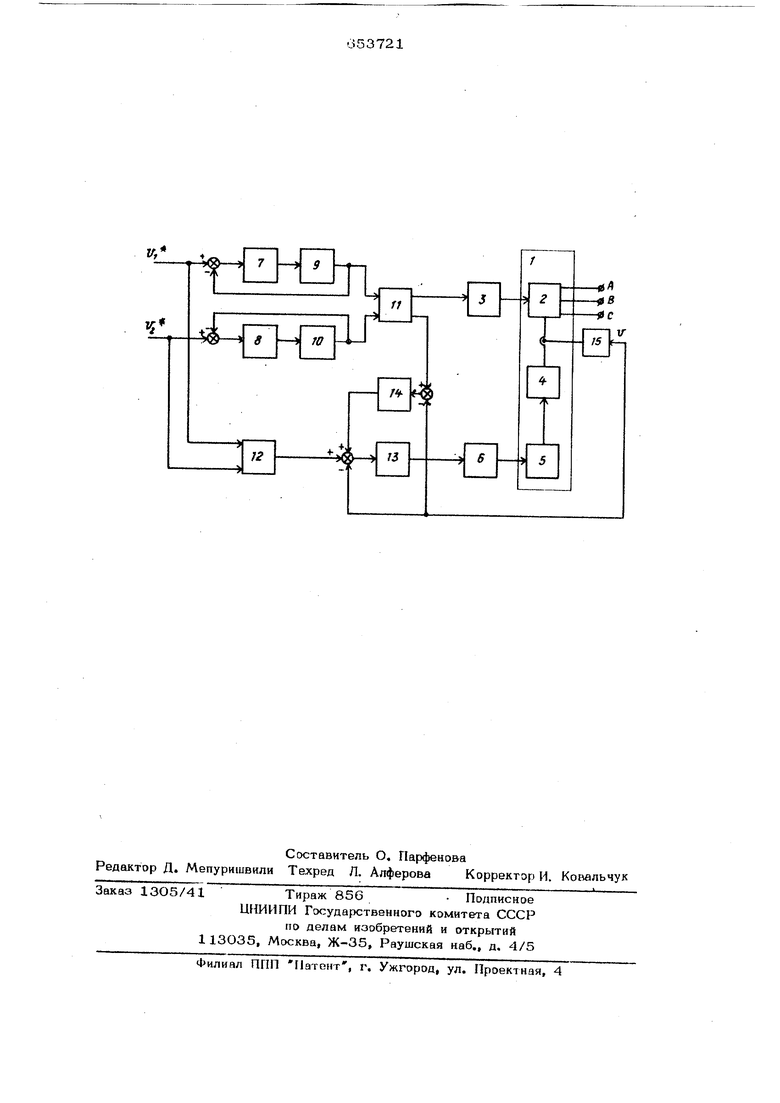
Настоящее изобретение относится к системам управления преобразователями частоты с автономными инверторами и может быть использовано для привода испытательных стендов машиностроительных заводов, в текстильной промышленности (производстве искусственного волокна) , для шлифовальных станков и в других случаях. Известны системы регулирования, построенные по подчиненному принципу, в которых используется смешанное регулирование обобщенных векторов по ным и ортогональным координатам При этом внутренние подчиненные контур замыкаются по полярным координатам вектора тока или напряжения статора дви гателя, а внешние контуры - по ортогональным координатам. Необходимость смешанного регулирования обусловлена тем, что преобразователь частоты с авто номным инвертором тока или напряжения управляется непосредственно по пoляpньп координатам выходного вектора; двигаполярИИ тель же управляется по ортогональным координатам. Из известных устройств наиболее близким по технической сущности к данкому является устройство |з}, содержащее блоки формирования амплитуды и фазы, преобразователь ортогональных координат в полярные, связанный одним кыходом с блоком формирования фазы, а другим выходом - со аходом регулятора модуля выходного вектора инвертора, соединенного другим входом с датчиком входной величины инвертора, а выходом с блоком формирования амплитуды. Недостатком известного выходного устройства является недостаточное быстродействие и значительные цинамические ошибки, приводящие к существенным отклонениям диаграмм электромагнитного момента и скорости от оптимальных. Целью настоящего изобретения является повышение быстродействия при снижении перерегулирования путем приближения законов управления преобразователом частоты по полярным координатам выходного вектора преобразователя к . оптимальным законам управления тем же вектором по ортогональным координатам, Поставленная цель достигается тем, что выходное устройство для системы управления преобразователем привода переменного тока с выпрямителем и .а&тономным инвертором, содержащее блок формирования фазы, выход которого соединен с выводом для подключения инвертора, блок формирования амплитуды, выход которого соединен с выводом для подключения выпрямителя, регулятор модуля, выход которого подключен ко входу блока формирования амплитуды, а один из входов - к выходу датчика входной величины инвертора, преобразователь координат, выход которого подключен ко входу блока формирования фазы, дополниг тельно снабжено двумя каналами, каждый из которых состоит из включенных последовательно апериодического и интегрального звеньев, охваченных отрицатель ной обратной связью, блоком выделения модуля, корректирующим регулятором, причем каждый канал выходом подключен ко входу преобразователя координат, а входом - к блоку выделения модуля, выходом подключенного ко входу регулятора модуля, при этом другой вход регулятора модуля подключен к выходу корректирующего регулятора, своими входам подключенного к датчику входной величины инвертора и к другому вькоду преобразователя координат. На чертеже .предста)влена функциональ ная схема устройства. Преобразователь частоты 1 состоит из инвертора 2, подключенного,входом к выходу блока формирования фазы 3, силового фильтра 4 и выпрямителя 5, подключенного входом к выходу блока формирования амплитуды 6. К выходам А, В, С инвертора подключается нагрузка (синхр ный или асинхронный двигатель). Каналы выходного устройства содержат апериодические 7, 8 и интегральны 9, 4.0 звенья и подключены ко входам преобразователя координат 11, подключенного выходом к блоку формирования фазы 3, а входы каналов входного устройства подключены к блоку выделения модуля 12, подключенного Выходом ко входу регулятора модуля 13 и выходу корректирующего регулятора 14, подклю ченЕюго входом к выходу датчика входной величины инвертора 15. На вход первого выходного устройства подается сигнал задания V стабилизируемой координаты. На вход аналогичного второго канала подается сигнал задания v программной координаты. X-fходные сигналы, v и Vg обои.х каналов подключены ко входам преобразователя координат 11, один из выходов которого, представляющий задание сГ фазы выходного вектора инвертора, связан с блоком 3 формирования фазы. Сигналы v подключены также к блоку 12 выделения модуля, своим выходом связанного с регулятором 13 модуля выходного вектора инвертора, подключенного к блоку 6. Другой аход регулятора 13 связан с выходом компенсирующего регулятора 14, на аходы которого поданы сигнал V коррекции модуля выходного вектора и сигнал V действительного значения входной величины инвертора, подаваемый с датчика 15. Блок 11 предназначен для вьшолнения преобразований; (7f В блоке 12 реализуется соотношение (v)-(v)2 (2; Как видно из (1) и (2), блоки 11 и 12 легко реализуются на обычных аналоговых сумматорах и функциональных элементах. Работа устройства в типовом режиме протекает следуквцим образом. Сначала из внешней части системы регулирования (на чертеже не показана) подается задающий сигнал У на вход звена 7 и на в.ход блока 12. Замкнутый . контур, состоящий из звеньев 7 и,9, настроенный на модульный оптимум, формирует оптимальный закон изменения во времени задающего сигнала v одной из ортогональнь х координат выходного вектора инвертора. Блок 11, преобразующий задающие сигналы по ортогональным координатам в задакйдие сигналы по полярным координатам, вырабатывает задание фазы d выходного вектора, которое воспроизводится блоком 3. - Одновременно блок 12 формирует в соответствии с (2) задание модуля вььходного вектора, которое отрабатывается контуром с регулятором 13, настроенным на модульный оптимум, путем воздействи на блок управления 6. Из-за нелинейности связи между ортогональными v, Vj и полярными уД координатами вектора V при обработке сигнала линейном закону (модульного оптимума), имеет место значительное отклонение изменений составлякпцах V , Vj от оптимальных значений. Эти отклонения уменьшаются корректирующим регулятором 14, на входе которого имеется разность между оптимальным V и действительным V значениями модуля выходного вектора. Регулятор 14 вырабатьюает корректирую щее воздействие для регулятора 13, приближая закон изменения модуля к тре буемому. На этом (первом) этапе формируется V составляющая вектора (стабилизируемая координата). На втором этапе, аналогично предьщутему, после подачи задающего воздействия V производится формирование Vg составляющей вектора (программная координата). Устройство предназначено для использования в системах управления преобразователями асиахронных электроприводов с инверторами тока к напряжения. В nef вом случае V есть намагничивающая, а V - активная составляющая тока статора. Во втором случае v и Vg - соответственно синфазные указанным токам составляющие напряжения статора. Данное устройство может быть теисже использовано в системах управления преобразователями синхронных электроприводов с инверторами тока и напряжения. Устройство обеспечивает практическую независимость формирования обои.х ортогональных координат выходного вектора при непосредственном управлении его полярными координатами и приближение законов изменения ортогональных координат этого вектора к оптимальным. В конечном счете это позволяет повысить быстродействие при снижении перерегулирования. Формула изобретения Выходное устройство для системы уп:равления преобразователем электропривода переменного тока с выпрямителем и автономным инвертором, содержащее блок формирования фазы, .выход которого соединен с выводом для подключения инвертора, блок формирования амплитуды с выходом, соединенным с вьтодом для подключения выпрямителя, регулятор модуля, выход которого подключен ко входу блока формирования a лплитyды, а один из входов - к выходу датчика аходной величины инвертора, преобразователь координат с выходом, подключенным ко входу блока формирования фазы, отличающееся тем, что, с целью повышения быстродействия при снижении перерегулирования путем приближения законов управления преобразователем частоты по полярным координатам выходного вектора преобразователя к оптимальным законам управления тем же вектором по ортогональным координатам, оно дополнительно снабжено двумя каналами регулирования, каждый из которых состоит из включенных последовательно апериодического и интегрального звеньев, охваченных отрицательной обратной связью, блоком выделения модуля и корректирующим регулятором, причем каждый канал вь1ходом подключен ко входу преобразователя координат, а входом - к блоку выделения модуля, выходом подключенным ко входу регулятора модуля, при этом другой вход регулятора модуля подключен к выходу корректирующего регулятора, своими входами подключенного к датчику входной величины инвертора и к другому выходу преобразователя координат. Источники информации, принятые во внимание при экспертизе 1. Becfeer н. D narniscti hoctiwertig e Dretiz.afi&TBpeEuno e-iner ymrictitergreapeister As-snctironmosclrine -Re etungstectintsctie Praxis und Prozep-Rectientechni1,1973,H.9. 2,Тарасенко Л. М. Асивхрониый двигатель с массивным обмотанным роторам как объект частотного управления ЭП Электропривод, вып. 1 (54), 1977. 3.Патент ФРГ № 1941312, кл. 21 с 59/36, приоритет от 14.О8.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |