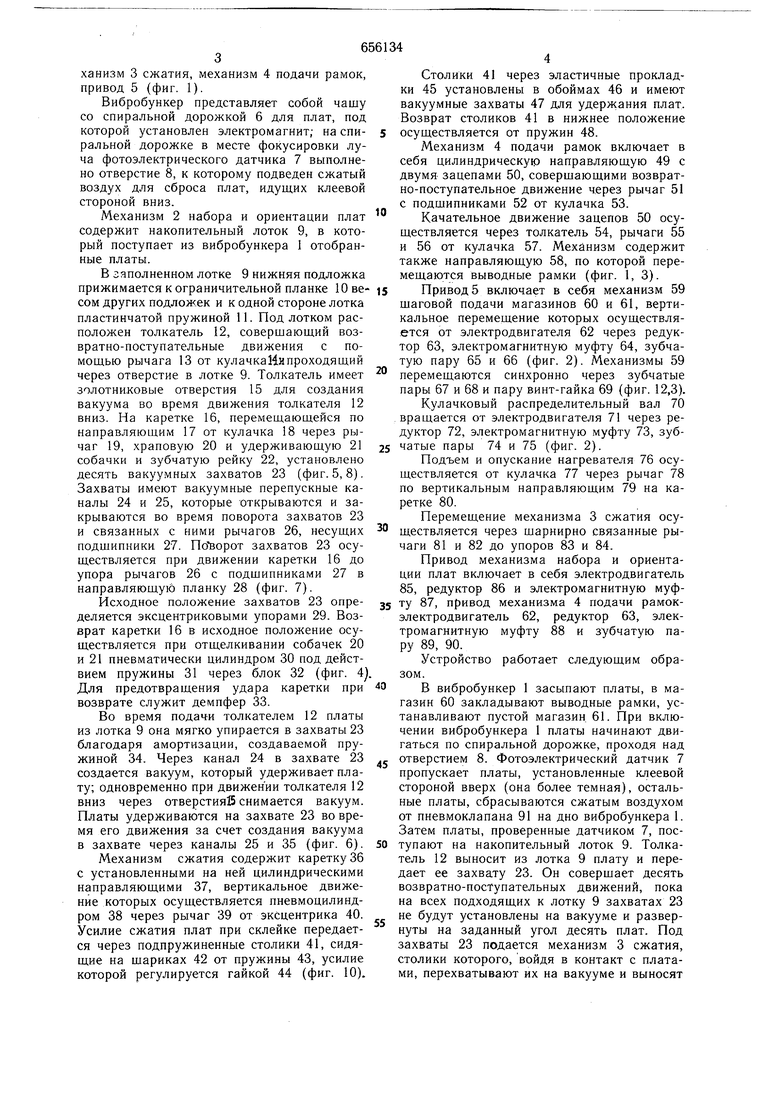
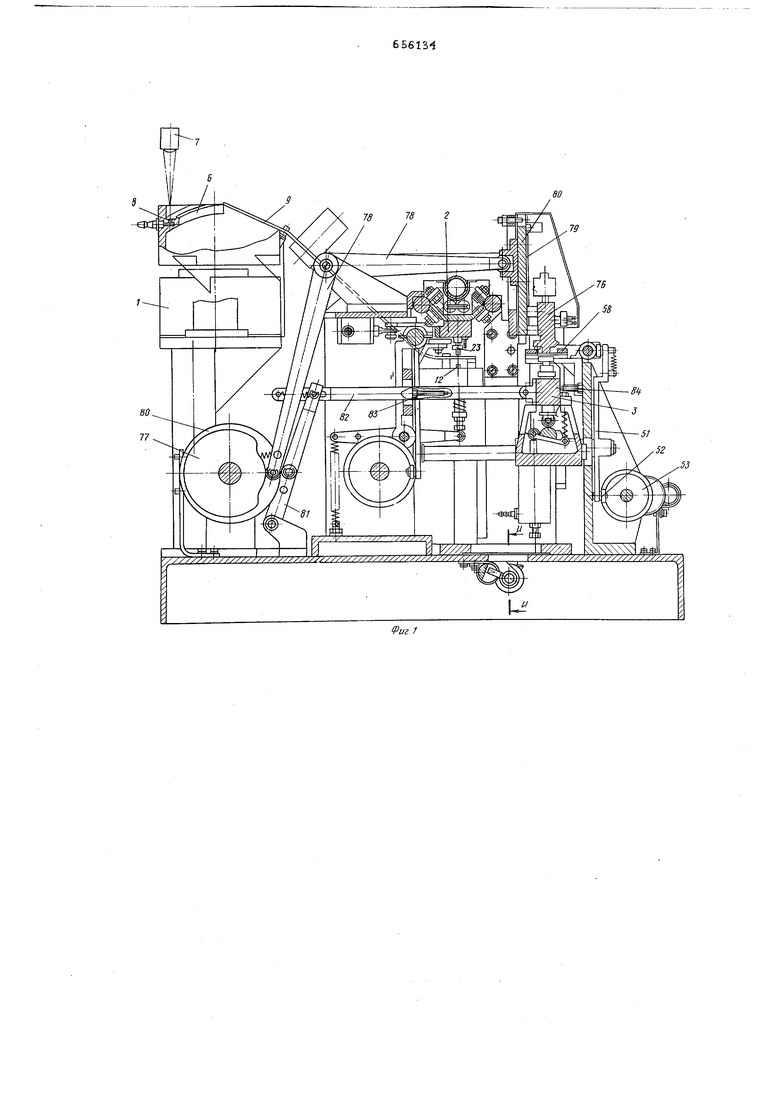
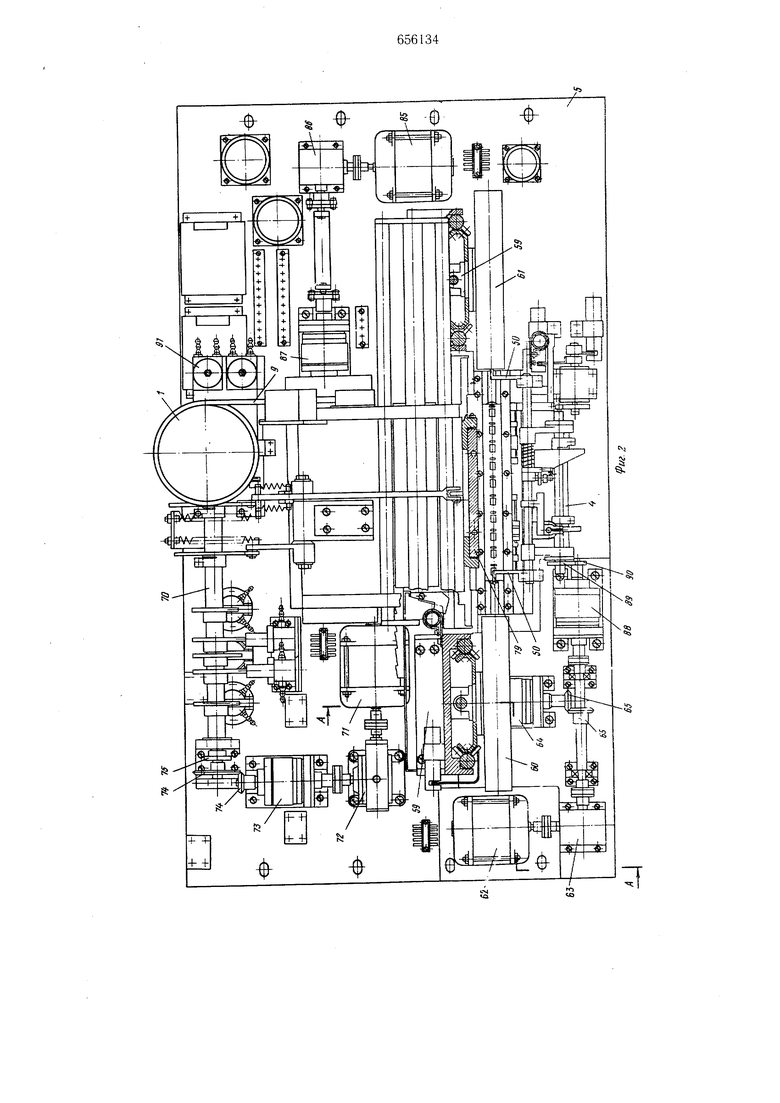
ханизм 3 сжатия, механизм 4 подачи рамок, привод 5 (фиг. 1). Вибробункер представляет собой чашу со спиральной дорожкой 6 для плат, под которой установлен электромагнит; на спиральной дорожке в месте фокусировки луча фотоэлектрического датчика 7 выполнено отверстие 8, к которому подведен сжатый воздух для сброса плат, идущих клеевой стороной вниз. Механизм 2 набора и ориентации плат содержит накопительный лоток 9, в который поступает из вибробункера 1 отобранные платы. В заполненном лотке 9 нижняя подложка прижимается к ограничительной планке 10 весом других подложек и к одной стороне лотка пластинчатой пружиной 11. Под лотком расположен толкатель 12, совершающий возвратно-поступательные движения с помощью рычага 13 от кулачкаНипроходящий через отверстие в лотке 9. Толкатель имеет золотниковые отверстия 15 для создания вакуума во время движения толкателя 12 вниз. На каретке 16, перемешающейся по направляющим 17 от кулачка 18 через рычаг 19, храповую 20 и удерживающую 21 собачки и зубчатую рейку 22, установлено десять вакуумных захватов 23 (фиг. 5, 8), Захваты имеют вакуумные перепускные каналы 24 и 25, которые открываются и закрываются во время поворота захватов 23 и связанных с ними рычагов 26, несущих подшипники 27. Поворот захватов 23 осуществляется при движении каретки 16 до упора рычагов 26 с подшипниками 27 в направляющую планку 28 (фиг. 7). Исходное положение захватов 23 определяется эксцентриковыми упорами 29. Возврат каретки 16 в исходное положение осуществляется при отщелкивании собачек 20 и 21 пневматически цилиндром 30 под действием пружины 31 через блок 32 (фиг. 4) Для предотвращения удара каретки при возврате служит демпфер 33. Во время подачи толкателем 12 платы из лотка 9 она мягко упирается в захваты 23 благодаря амортизации, создаваемой пружиной 34. Через канал 24 в захвате 23 создается вакуум, который удерживает плату; одновременно при движении толкателя 12 вниз через отверстияВ снимается вакуум. Платы удерживаются на захвате 23 во время его движения за счет создания вакуума в захвате через каналы 25 и 35 (фиг. 6). Механизм сжатия содержит каретку 36 с установленными на ней цилиндрическими направляющими 37, вертикальное движение которых осуществляется пневмоцилиндром 38 через рычаг 39 от эксцентрика 40. Усилие сжатия плат при склейке передается через подпружиненные столики 41, сидящие на щариках 42 от пружины 43, усилие которой регулируется гайкой 44 (фиг. 10). Столики 41 через эластичные прокладки 45 установлены в обоймах 46 и имеют вакуумные захваты 47 для удержания плат. Возврат столиков 41 в нижнее положение осуществляется от пружин 48. Механизм 4 подачи рамок включает в себя цилиндрическую направляющую 49 с двумя зацепами 50, совершающими возвратно-поступательное движение через рычаг 51 с подщипниками 52 от кулачка 53. Качательное движение зацепов 50 осуществляется через толкатель 54, рычаги 55 и 56 от кулачка 57. Механизм содержит также направляющую 58, по которой перемещаются выводные рамки (фиг. 1, 3). Привод 5 включает в себя механизм 59 шаговой подачи магазинов 60 и 61, вертикальное перемещение которых осуществляется от электродвигателя 62 через редуктор 63, электромагнитную муфту 64, зубчатую пару 65 и 66 (фиг. 2). Механизмы 59 перемешаются синхронно через зубчатые пары 67 и 68 и пару винт-гайка 69 (фиг. 12,3). Кулачковый распределительный вал 70 вращается от электродвигателя 71 через редуктор 72, электромагнитную муфту 73, зубчатые пары 74 и 75 (фиг. 2). Подъем и опускание нагревателя 76 осуществляется от кулачка 77 через рычаг 78 по вертикальным направляющим 79 на каретке 80. Перемещение механизма 3 сжатия осуществляется через шарнирно связанные рычаги 81 и 82 до упоров 83 и 84. Привод механизма набора и ориентации плат включает в себя электродвигатель 85, редуктор 86 и электромагнитную муфту 87, привод механизма 4 подачи рамокэлектродвигатель 62, редуктор 63, электромагнитную муфту 88 и зубчатую пару 89, 90. Устройство работает следующим образом. В вибробункер 1 засыпают платы, в магазин 60 закладывают выводные рамки, устанавливают пустой магазин 61. При включении вибробункера 1 платы начинают двигаться по спиральной дорожке, проходя над отверстием 8. Фотоэлектрический датчик 7 пропускает платы, установленные клеевой стороной вверх (она более темная), остальные платы, сбрасываются сжатым воздухом от пневмоклапана 91 на дно вибробункера 1. Затем платы, проверенные датчиком 7, поступают на накопительный лоток 9. Толкатель 12 выносит из лотка 9 плату и передает ее захвату 23. Он совершает десять возвратно-поступательных движений, пока на всех подходящих к лотку 9 захватах 23 не будут установлены на вакууме и развернуты на заданный угол десять плат. Под захваты 23 подается механизм 3 сжатия, столики которого, войдя в контакт с платами, перехватывают их на вакууме и выносят под направляющую 58. Одновременно из магазина 60 зацепы 50 вытаскивают десять выводных рамок и, последовательно подавая их, устанавливают над платами под нагревателем 6. Нагреватель опускается на выводную рамку, а столики механизма 3 сжатия с платами поднимаются. При контактировании разогретой выводной рамки с клеевой стороной платы происходит склейка. Так как процесс склейки длительный, то за время склейки механизм набора плат набирает очередную партию плат, а механизм щаговой подачи магазинов поднимает в зону зацепов очередную партию выводных рамок. После окончания процесса склейки нагреватель 76 поднимается, столики 41 механизма 3 сжатия опускаются и передвигаются вновь к механизму 2 набора плат, а зацепы 50 убирают с позиции склейки выводные рамки с приклеенными платами в пустой магазин 61, одновременно вытаскивая из магазина 60 новую партию выводных рамок. Затем цикл повторяется. Формула изобретения 1. Устройство для приклейки плат к выводной рамке, содержащее смонтированные на основании и соединенные с приводными механизмами вибробункер, механизм подачи рамок, механизм сжатия и нагреватель, отличающееся тем, что, с целью повыщения производительности и качества приклейки, оно снабжено механизмом набора и ориентации плат, содержащим каретку, размещенную над лотком вибробункера и снабженную вакуумными захватами, имеющими возможность поворота относительно вертикальной оси при взаимодействии с направляющей планкой, закрепленной на основании. 2. Устройство по п. 1, отличающееся тем, что механизм сжатия выполнен в виде каретки, установленной на основании с возможностью перемещения в направлении, перпендикулярном направлению перемещения каретки механизма набора плат, и содержащей подпружиненные столики, снабженные захватами и установленные на каретке с возможностью вертикального перемещения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 414764 кл. Н 05 К 13/02 01.02.71. 2.Оборудование для приклейки промежуточных подложек на отрезок ленты. Технический отчет предприятия черт. ДЕМ. 2.227.000. Автомат МС-1 A3-1.
Г
69
5



Р
Вид Г
Фиг Ю 5
fui. 2
Ш- ж
U-U
68
Фиг. 13
