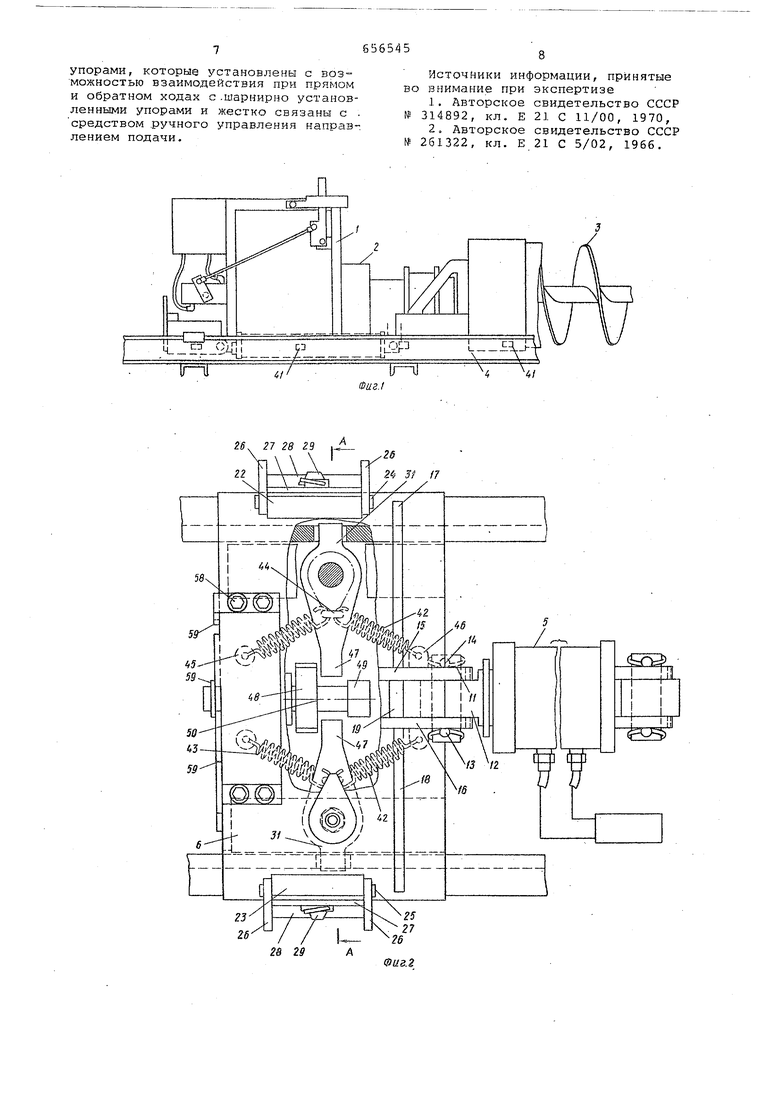
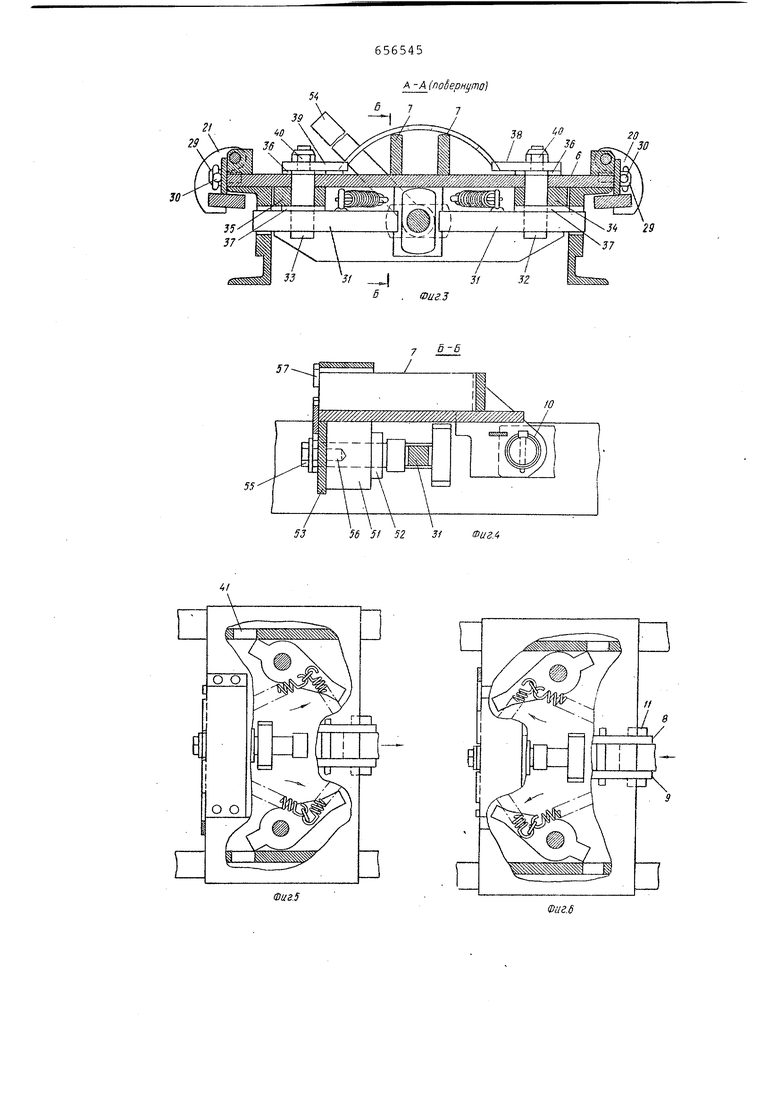
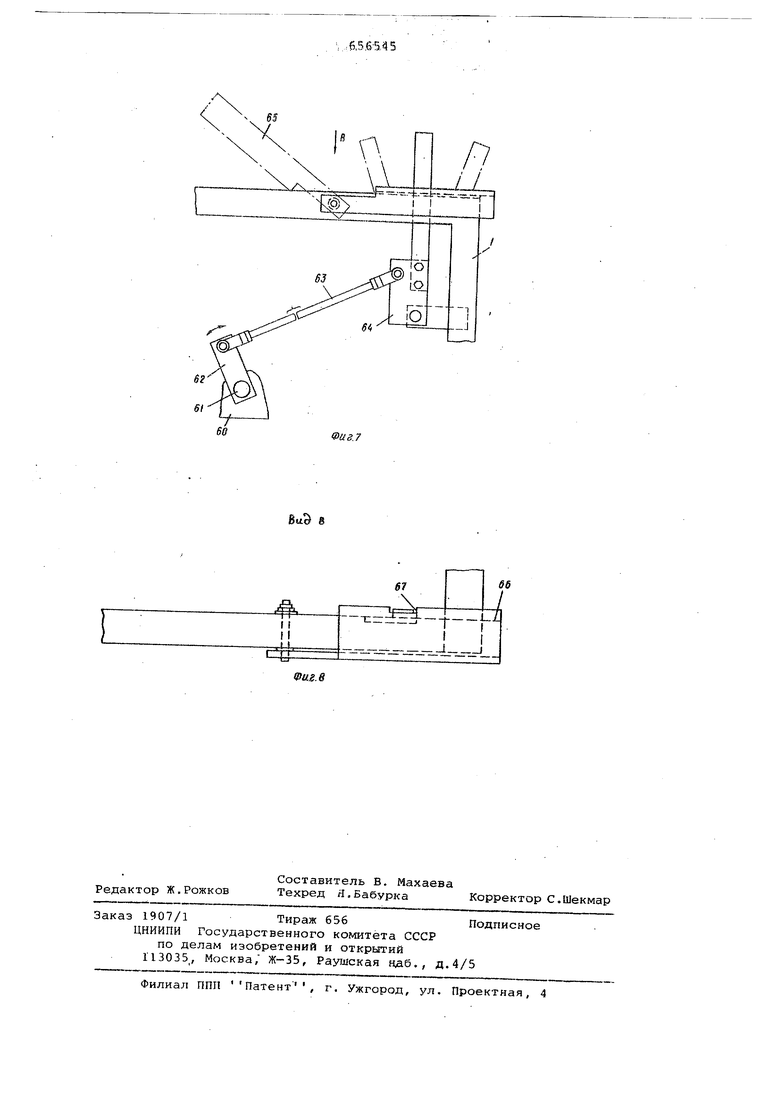
(54) ШАГАЮЩИЙ МЕХАНИЗМ ПОДАЧИ БУРОВОЙ УСТАНОВЮ гающей балкой 1 буровой установки 2 перемещая последнюю как вперед, так и назад. Балка 1 содержит опорную плиту б опирагощугося на направляющие в виде рельсов 4. Опорные элементы 7 привариваются к опорной плите б и обеспечивают дополнительную жесткость установки. Опорные элементы 7 имеют уширения, образующие кронштейны 8 и 9, обеспечивающие соединение гидравлического цилиндра 5 с балкой 1, В каждом кронштейне выполнено круглое отверстие 10, в котором устанавливается палец 11, Цилиндр 5 снабжен проушиной 12, расположенной между кронштейнами 8 и 9, для взаимодействия с пальцем 11 и стопорными штифтами 13 и 14, удерживающими палец 11, В опорной плите б выполнены две канавки 15 и 16 (фиг. 2) , в которых располагаются кронштейны 8 и 9. Опорная плитй б поддерживается приваренными к ней плитами 17 и 18, а также расположенной мелоду кронштейнами 8 и 9 плитой 19. Для предотвращения подъема шагающ балки 1 с рельсов 4 предусмотрены запирающие элементы 20 и 21 (фиг. 3 В кронштейны 22 и 23, приваренные к опорной плите б, плотно входят паль цы 24 и 25, на них шарнирно устано лены рычаги 26, между которыми расположены приваренные к ним пластины 27. Запирающие элементы 28 проходя под рельсами 4. На опорной плите б жестко закреплены шпильки 29, над которыми установлены пластины 27. С порные штифты 30 блокируют запирающие элементы 20 и 21 от поворота в расцепленное положение из-за наличия связи между « .пластинами 27 и штифтами 30. Для зацепления балки 1 с рельсам 4 предусмотрены собачки 31,, шарнирн прикрепленные соответственно пальц 32 и 33 к балке 1, Пальцы 32 и 33 жестко закреплены в собачках 31 и поворачиваются вместе с ними и в на правляющих элементах 34 и 35 и опор ной плите 6. Направляющие элементы 34 и 35 увеличивают длину шагающей балки 1 с тем, чтобы обеспечить ей выравненное положение на рельсах 4. Между собачками 31 и балкой 1 установлены шайбы 36 и 37, создающие опорные поверхности для относительного вращения шагающей балки 1 и со бачек 31. Над опорной плитой б уста новлены индикаторы 38 и 39, которые показывают угловое положение собачек 31. Кроме того, индикаторы 38 и 39 создают опорные поверхности для шайб 36.; Штифты 32 и 33 крепятся гайками 40. Собачки 31 взаимодействуют с отверстиями 41, выполненными в рельсах 4, и могут поворачиваться для выхода из зацепления с рельсами 4, как показано на фиг. 5 и б. Зацепляющее действие собачек 31 обеспечивается пружинами 42 и 43. Креп-ление пружин 42 и 43 к собачкам 31 осуществляется с помощью рым-болтов 44, а к балке кронштейнами 45 и 46. Для определения направления движения шагающей балки 1 предусматриваются средства, работающие совместно с собачками 31 для удержания их- от расцепления, когда балка 1 смещается в заданном направлении. Таким сдерживающим средством, хорошо работающим в сочетании с одним элементом, являются упоры 47 собачек и жестко связанные между собой дополнительные упоры в виде блоков 48 и 49, которые устанавливаются на действующий элемент или вал 50 таким образом, что наибольшая сторона одного блока перпендикулярна наибольшей стороне другого блока. Блоки 48, 49 и вал 50 могут поворачиваться на 90° с целью установки каждого из блоков 48 и 49 в горизонтальное положение. Когда один из блоков 48 и 49 находится в горизонтальном положении, он блокирует собачки 31 от вращения в одном из направлений. Вал 50 шарнирно устанавливается в опоре 51 и распорной втулке 52, что облегчает, его правильную установку в шагающей балке, при этом опора 51 приваривается к несущей плите 53, расположенной поперек балки 1 между рельсами 4. На конце вала 50 установлен рычаг 54 ручного управления, который крепится к валу 50 с помощью болта 55, входящего в отверстие 56. Кольцевая направляющая 57 крепится к опорной плите б болтами 58 и выходит за цлиту 53 и опорную плиту 6 с целью создания препятствия для рычага 54. В уширенной части направ.ляющей 57 выполнены пазы 59, расположенные над центром вала 50 под углом 45° к нему в ту или другую сторону. Рычаг 54 устанавливается под углом 4 5к наибольшей стороне каждого из блоков 48 и 49 с тем, чтобы тот или иной блок располагался горизонтально, когда рычаг 54 находится в одном из пазов 59, расположенных под углом 45° к вертикали. Когда рычаг находится в центральном пазу 59, то каждый из блоков 48 и 49 повернут на 45° относительно вертикали. В этом положении оба блока 48 и 49 мешают вращению собачек 31, предотвращая их расцепление с рельсами 4. Приводимый в действие насосом 60 гидравлический цилиндр 5 двойного действия осуществляет продвижение вперед и отвод назад балки 1 (фиг. 8 и 9). Желательно использовать на.сос с переменной производительностью с тем, что,бы обеспечить относительно быстрое смещение цилиндра 5 при низких нагрузках и относительно высокое выходное давление с соответственно небольитм ходом цилиндра 5 при высоких нагрузках. Вал 61 насоса соединяется с коленом 62, а затем через тягу 63 с рычагом 64 управления (фиг. 8). Последний шарнйрно крепится к буровой установке 2. Поворот рычага 64 управления из вертикального положения определяет направление и величину потока через насос.
В насосах переменной производительности возникают усилия, под действием которых вал .61 насоса устанавливается в нейтральное положение, пр котором гидравлический поток встречает наибольшее сопротивление. За счет правильного выравнивания и допуска подшипника сопротивление трени между валом 61 и рычагом управления 64 может быть меньше, чем величину этих сил, В конце хода цилиндра 5 вал 61 и рычаг 64 ускоренно перемещаются в нейтральное положение. За счет массы вала 6lVколена 62, тяги 63 и рычага 64 управления последний Продолжает движение в течение нескольких циклов Процесса перемещения до тех пор, пока буровое устройство 2 или шагающая балка 1 сами не остановятся.
Когда не требуется полной автоматизации, с рычагом 64 управления может поворачиваться и рычаг 65, который шарнйрно устанавливается в буровой установке и снабжен плитой 66, расположенной на пути движения рычага 64. На плите 66 имеется паз 67 в который входит рычаг 64, занимая нейтральное положение, когда насос работает с большой пэрегрузкой. Поскольку плита 66 частично расположена на пути движения рычага 64, она создает сопротивление трения относительному перемещению рычага 64 и буровой установки 2.
Установка работает следующим образом.
Рычаг 54 устанавливается так, чтобы блок 48 находился в горизонтальном положении. С собачками 31, установленными в первом комплекте отверстий 41, выдвигается цилиндр 5. В результате этого буровая установка 2 продвигается по рельсам 4. В конце хода выдвижения гидравлический поток через насос 60 реверсируется, и цилиндр 5 совершает обратный ход. Поскольку буровая установка 2 тяжелее, чем шагающая балка 1, последняя сдвигаезгся в направлении к установке 2. В результате этого собачки 31 поворачиваются, выходят из отверстий 41 и скользят вдоль рельсов 4. В конце втягивания цилиндра собачки 31 взаимодействуют с следующим комплектом отверстий 41, повернувшись до этого в положение зацепления.
Необходимо, ытобы ход цилиндра 5 был несколько больше, чем расстояние между отверстиями 41, так как собачки должны проходить за отверстия 41 прежде, чем они смогут повернуться
в положение зацепления. После зацепления насос 60 реверсируется, и цилиндр начинает выдвигаться. Блок 48 предотвращает вращение собачек 31, и они остаются в зацеплении, неполвнжно удерживая тем самым шагающую балку относительно рельсов 4. Следователь- но, буровое устройство 2 снова продвигается, т.е. происходит второй цик.:1 процесса перемещения.
Аналогичная последовательность
0 осуществляется для отвода установки 2 за счет поворота рычага 54 на ЭО, что приводит к установке блока 49 в горизонтальное положение (фиг. 6).
Когда оператору требуется поочередно продвигать или отводить уста-;
5 новку 2 на короткое расстояние, то рычаг 54 устанавливается в вертикальное положение, в результанте чего блоки 4В и 49 одновременно взаимодействуют с собачками 31, которые не
0 могут поворачиваться ни в одном из направлений, и шагающая балка 1 неподвижно удерживается относительно рельсов 4. Для автоматического управления устройством противодействующий рычаг
5 65 отводится с пути движения рычага 64 управления, в результате чего последний свободно передвигается и автоматически реверсирует направление движения цилиндра 5 в конце его каж0дого хода.
Это управление можно использовать только тогда, когда насос частично нагружен, поэтому оно применяется для отвода установки 2 или ее подачи вперед до взаимодействия бура 3 с
5 грунтом.
Таким образом,шагающая балка 1 может работать с одной настройкой рычага 64 управления и не,требует при
0 этом отдельной операции расцепления . для каждого цикла процесса перемещения. После установления направления перемещения рычагом 54 весь процесс перемещения контролируется рычагом 64 управления. Кроме того, процесс перемещения может быть полностью автоматизирован.
Формула изобретения
Шагающий механизм подачи буровой установки, включающий направляющие, с отверстиями которых взаимодействуют шарнйрно установленные упоры механизма шагового перемещения буровой установки, связанные с последней посредством силового цилиндра двустороннего действия, средство ручного управления направлением подачи механизма шагового перемещения, о т,личающийс я тем, что, с целью автоматизации процесса подачи, механизм шагового перемещения выполнен с двумя жестко свя;к:и1нымн между собой ПОВОРОТНЫГ-1И лопо.1нительны и
упорами, которые установлены с возможностью взаимодействия при прямом и обратном ходах с .а1арнирно установленными упорами и жестко связаны с . средством ручного управления направлением подачи.
Источйикн информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 314892, кл, Е 21 С 11/00, 1970,
2 Авторское свидетельство СССР № 261322, кл. Е 21 С 5/02, 1966.
ГПГ
/
1г-и
Ч/
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибромолот | 1974 |
|
SU1194288A3 |
| Шиберный затвор сталеразливочного ковша | 1975 |
|
SU969145A3 |
| Устройство для кладки кирпичных стен | 1974 |
|
SU772489A3 |
| АВТОМОБИЛЬ | 2006 |
|
RU2311312C2 |
| Головной агрегат хлопкоуборочной машины | 1982 |
|
SU1271358A3 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| Устройство для контроля жидкости в прозрачных ампулах | 1985 |
|
SU1453262A1 |
| ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ РАСПЛАВЛЕННОГО СТЕКЛА | 1990 |
|
RU2031862C1 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| УСТРОЙСТВО для ПОДАЧИ ЗАГОТОВОК и УДАЛЕНИЯ ОТШТАМПОВАННЫХ ДЕТАЛЕЙ | 1965 |
|
SU171846A1 |
16 27 28 29 , 2S 29
I
5356 51 52
/А -А (rtoSepHi mo} 77
б-Б
3i ФигА
Фиг.5
Фиг.6
Фаг,7
