(54) УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обезглавливания рыбы | 1970 |
|
SU374893A1 |
| Машина для разделки рыбы на балык | 1975 |
|
SU567428A1 |
| Машина для разделки плоских рыб | 1958 |
|
SU123299A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ КРУПНОЙ РЫБЫ | 1967 |
|
SU200754A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБ ЛОСОСЕВЫХ ПОРОД | 1953 |
|
SU101702A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБЫ | 1967 |
|
SU191082A1 |
| Машина для разделки рыбы для консервов | 1938 |
|
SU59553A1 |
| ТРАНСПОРТИРОВОЧНАЯ УСТАНОВКА, СПОСОБ ТРАНСПОРТИРОВКИ РЫБЫ ПОПЕРЕЧНО ЕЕ ПРОДОЛЬНОЙ ПРОТЯЖЕННОСТИ В НАПРАВЛЕНИИ ТРАНСПОРТИРОВАНИЯ И РЫБООБРАБАТЫВАЮЩАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ ТРАНСПОРТИРОВОЧНУЮ УСТАНОВКУ | 2017 |
|
RU2717486C1 |
| Устройство для обезглавливания потрошенной рыбы | 1973 |
|
SU506268A3 |
| Устройство для филетирования мелкой рыбы | 1982 |
|
SU1082368A1 |

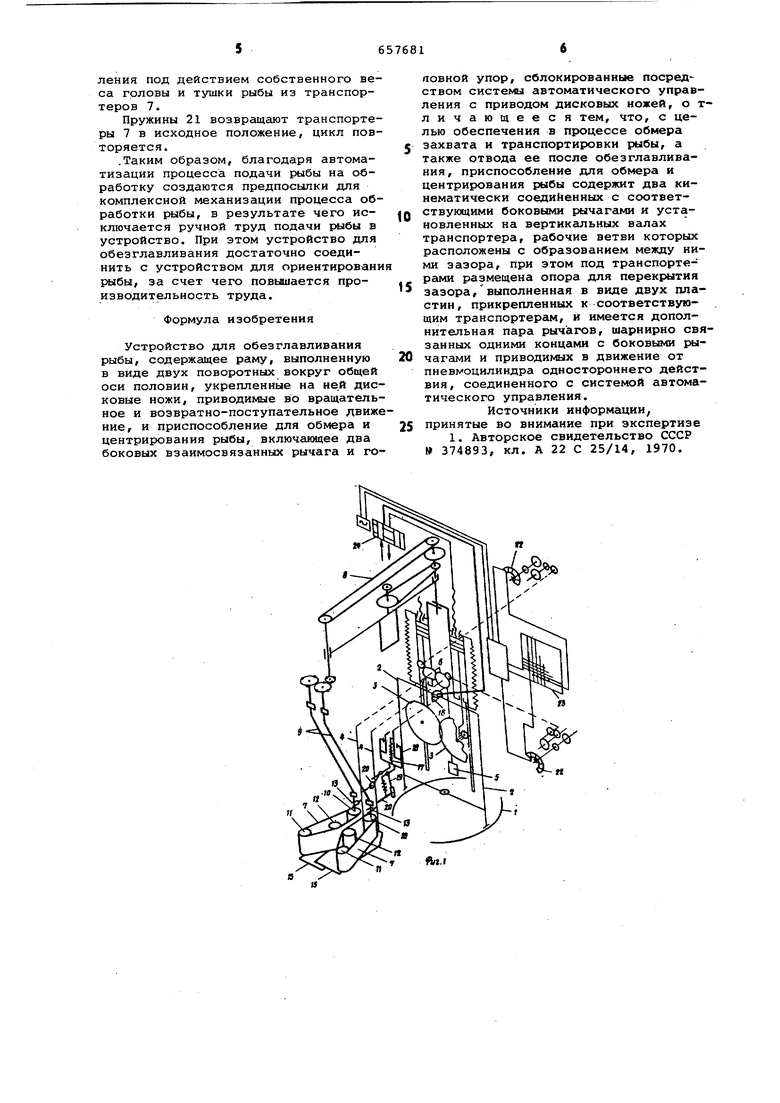
Изобретение касается машин.для переработки рыбк. Известно устройство для обезглав вания рыбы, содержащее раму, выполненную в виде двух поворотных вокруг общей оси половин, укрепленные на ией дисковые ножи, приводимые во вращательное и возвратно-поступательное движение, и приспособление для обмера и центрирования рыбы, включающее два боковых взаимосвязан ных рычага и головной упор, сблокированные посредством системы автоматического управления с приводом дисковых ножей. Для обеспечения одновременного вращательного и возвратно-поступа тельного движения дисковых ножей последние укреплены на зубчатых валиках, входящих в зацепление с рейкой и связанных со штоком пневмоцилиндра 1. Данное устройство является наибо лее близким к изобретению по технической сущности и достигаемому результату . Однако в этом устройстве приспособление для подачи рыбы на обработ ку выполнено в виде загрузочного ло ка, при этом рыба в устройство заг ; ружается вручную и вследствие трения скольжения пластинок боковых рычагов о поверхность рыбы затруднена загрузка рыбы, а также удаление тушки рыбы из лотка. Целью изобретения является обеспечение в процессе обмера захвата и транспортировки рыбы, а также отвода ее после обезглавливания, т.е. увеличение производительности машин при поточном производстве. В предлагаемом устройстве приспособление для обмера и центрирования рыбы содержит два кинематически соединенных с соответствующими боковыми рычагами и установленных на вертикальных валах транспортера, рабочие ветви которых расположены с образованием между ними зазора, при этом под транспартерами размещена опора для перекрытия зазора, выполненная в виде двух пластин, прикрепленных к соответствующим транспортерам, и имеется дополнительная пара рычагов, шарнирно связанных одними концами с боковыми рычагами и приводимых в движение от пневмоцилиндра одностороннего действия, соединенного с системой автоматического управления. На фиг. 1 схематично изображено устройство для обезглавливания рыбы общий вид; на фиг. 2 - вариант подачи рыбы транспортерами во взаимосвязи с обмерными рычагами; на фиг. 3 варианты регулировки положения транспортеров и дисковых ножей один относительно другого. Устройство для обезглавливания ры Зы состоит из кольцеообразного основания 1, на котором установлена рама состоящая из двух шарнирно-соединенных половин 2, на которых укреплены дисковые ножи 3 с пневматическим при водом, обеспечивающим их одновременное вращательное и возвратно-поступа тельное движение, приспособления для обмера и центрирования рыбы, содержащего два боковых рычага 4, связанных между собой зубчатыми сегментами 5, и рычаг с головным упором 6, и двух транспортеров 7, приводимых в дБихсение от клиноременного привода 8 через гибкие валы 9. Каждый тра спортер 7 содержит вертикальные ведущий и ведомый валы 10 и 11 и отжимной ролик 12. Между рабочими вет вями транспортеров 7 образован зазор, ширина которого зависит от раз мера обрабатываемой рыбы. Для облег чения захвата рыбы наружная часть з зора выполнена расширяющейся. Для регулировки положения транспортеров 7 относительно дисковых н жей 3 к боковым рычагам 4 посредством клеммного соединения 13 прикреп лены подшипники 14 вертикальных ведущих валов 10. Под транспортерами 7 размещена опора для пере срывания зазора/ выполненная в виде двух пластин 15, прикрепленных к соответствующим тра спортерам. Для раздвижки боковых рычагов с транспортерами 7 имеется пневмоцилиндр одностороннего действия, состоящий из неподвижного штока 16, пружины 17 и подвижной гильзы 18. Последняя связана с боковыми рычага ми 4 через пару рычагов 19, в проре зях которых скользят паЛьцы 20, жес ко закрепленные на боковых рычагах Закрепляя пальцы 20 в различных пол жениях, можно изменять величину раз движки транспортеров 7. Пружины 21 одним концом прикрепл ны к гильзе 18, а другим - к пальцам 20 и служат для удержания транспортеров в исходном положении. Приспособление для обмера и центрирования рыбы, дисковые ножи 3 с пневматическим приводом и пневмоцилиндр связаны с системой автоматического управления, состоящей из преобразователей 22, штеккерной панели 23 с электронным блоком и воздухораспределителя 24 с электромагнитом. Устройство работает следующим образом. Перед включением устройства в работу производят настройку ножей 3 на нужную по технологии конфигурацию реза. Одновременно регулируют положение транспортеров 7 относительно ножей 3. Затем задают программу для установления линии реза одного вида, различных по величине рыб. Чтобы задать программу, из партии выбирают несколько рыб разных размеров, устанавливают каждую из |Них под ножами 3 по линии реза (край жаберных крышек), При таком положеНИИ рыбы рабочие ветви транспортеров 7 и головной упор 6 раздвинуты. Линейные перемещения ветвей транспортеров 7 упора 6 передаются через кинематически связанные звенья на преобразователи 22, которые преобразуют механические перемещения в электрические сигналы, и на штеккерной . панели 23 загораются соответствующие лампочки, сигнализирующие замыкаемую электрическую цепь управления работой воздухораспределителя 24. Аналогичные действия осуществляются с остальными отобранными рыбами. Затем в обычно принятом порядке замыкают все остальные цепи управления. Рыба, предварительно сориентированная головой вперед, подается одна .за другой из пластины 15 в расширенную часть рабочих ветвей транспортеров 7. При неподвижной гильзе 18 транспортеры 7, захватывая рыбу с обеих сторон, раскрываются на толщину (высоту) рыбы за счет скольжения пальцев 20 в прорезях рычагов 19 и осуществляют прдачу рыбы к ножам 3. При этом происходит центрирование рыбы, обмер по толщине (высоте) и удержание ее в соответствующем положении до момента обезглавливания. От контакта с рыбой рабочие ветви транспортеров 7 и упор 6 через кинематически связанные звенья сигнализируют свои взаимные положения на систему автоматического управления/ в которой формируются и реализуются сигналы, управляющие подачей сжатого воздуха на пневматический привод ножей 3 и в полость гильзы 18 пневмоцилиндра. В момент обезглавливания рыбы ножами 3 раздвижка транспортеров 7 происходит за счет того, что гильза 18 под действием сжатого воздуха скользит по неподвижному штоку 18 и приводит в движение рычаги 19, которые, выбирая свободный ход, передают это движение через пальцы 20 на боковые рычаги 4 с транспортерами 7 и раздвигают их. Величина раздвижки транспортеров больше тощины (высоты) рыбь1, что обеспечивает возможность удаления под действием собственного веса головы и тушки рыбы из транспортеров 7. Пружины 21 возвращают транспортеры 7 в исходное положение, цикл повторяется. .Таким образом, благодаря автоматизации процесса подачи рыбы на обработку создаются предпосылки для комплексной механизации процесса обработки рыбы, в результате чего исключается ручной труд подачи в устройство. При этом устройство для обезглавливания достаточно соединить с устройством для ориентировани , за счет чего повьоиается производительность труда. Формула изобретения Устройство для обезглавливания рыбы, содержащее раму, выполненную в виде двух поворотных вокруг общей оси половин, укрепленные на ней дисковые ножи, приводимые во вращательное и возвратно-поступательное движе ние, и приспособление для обмера и центрирования рыбы, включающее два боковых взаимосвязанных рычага и гоп
п
л, г ловной упор, сблокированные посредством системы автоматического управления с приводом дисковых ножей, о тличающееся тем, что, с целью обеспечения в процессе обмера захвата и транспортировки рыбы, а также отвода ее после обезглавливания , приспособление для обмера и центрирования рыбы содержит два кинематически соединенных с соответствующими боковыми рычагами и установленных на вертикальных вгшах транспортера, рабочие ветви которых расположены с образованием между ними зазора, при этом под транспортерами размещена опора для перекрытия зазора,выполненная в виде двух пластин, прикрепленных к соответствующим транспортерам, и имеется дополнительная пара рычагов, шарнирно связанных одними концами с боковыми рычагами и приводимых в движение от пневмоцилиндра одностороннего действия, соединенного с системой автоматического управления. Источники информации/ принятые во внимание при экспертизе 1. Авторское свидетельство СССР 374893, кл. А 22 С 25/14, 1970.
