I
Изобрс1теиие относится-к машиностроению, в частности к автооператорам станочного, сборочного и т. п. автопатнзированного оборудования.
Известны конструкцнн автооператоров с двумя рукамн для загрузки н выгрузки заготовок; или готовых изделий в зону лбработкн (Сборки) из накопителя, в которь х обеспечнвается такой цнкл работы рук, при котором тблько одна рука в каждый момент времени находится в зоне обработки, работа рук осуществляется посредством гидроцилиндров, .управляемых гидрораспределите лями от кЬнечиых выключателей (1.
Эта конструкция отличается сложностью привода из-за наличия электроуйравляемых гидрораспределителей на каждый гидроцилиндр руки и иедостаточиой надежностью вследствие возможного (угказа конечных выключателей. Кроме того, в тех случаях, когда траектория двнжения рукн не проходит вблизи от корпусных деталей оборудования, не всегда возможиа установка конечных выключателей..
Известны также автооператоры, .в которых система блокировки одновременного нахождения рук в рабочей зоне обеспечнвается за счет того, что бесштоковые .полости гидроцилиндров связаны между собой и с напорной и сливноймагистралями через подпорный зoлotник и двухпозниноиный распределитель, и штоковые полости связаны с цапорной и сливной магистралями через трехпозиционный, распределитель, с общей сливной линией 2.
Однако в данном устройстве в подпорном золотнике возможно заклинивание в открытом положении, что может привести к самопроизвольному опусканию рук в зону обработки. К тому же, в нем имеется большое количество гидроаппаратуры.
Целью изобретеиия является повышение надежности работы автооператора и упрощение конструкции.
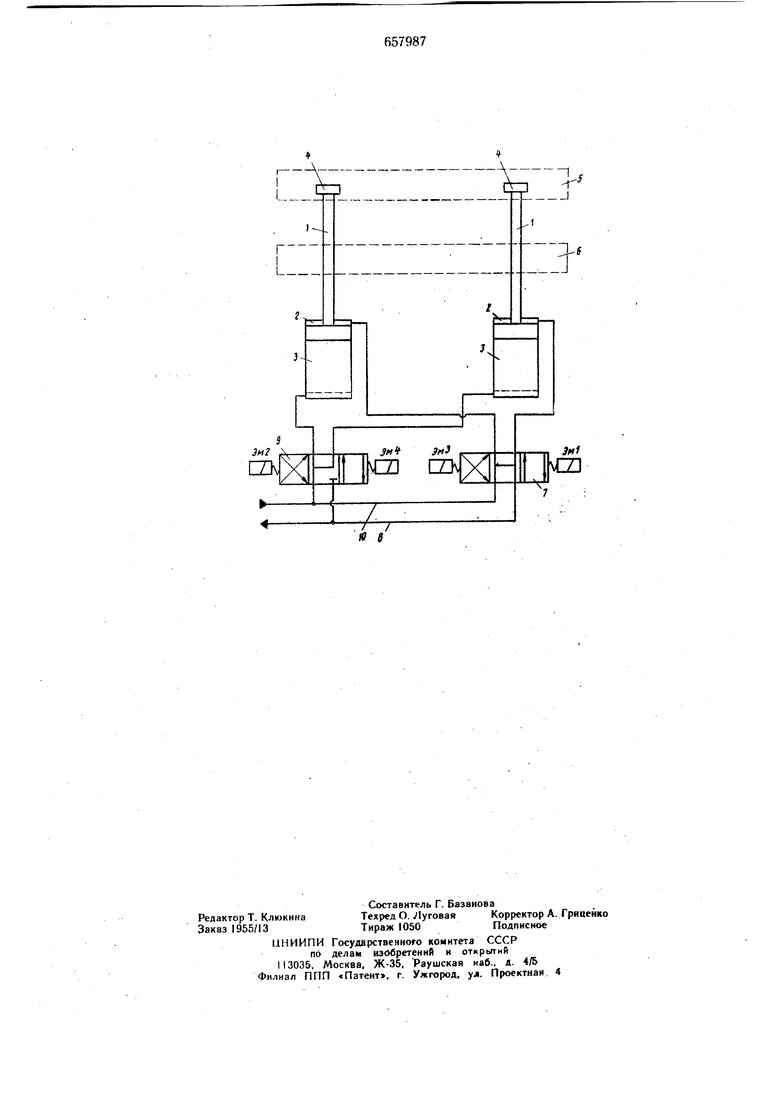
Это достигается тем, что средство для блокировки выполнено в виде трехпозиционного распределителя, связывающего бесштоковые полости гндроцилиндров с напорной магистралью в одной из позиций. 0 На чертеже представлена принципиальная гидрокинематическая схема автооператора.
Автооператор содержит гидроцилинары со щтоками 1, штоковыми подоЬтями 2 и
сс1 1токовымн полостями 3. .Штоки Связаы с руками 4 (показаны условно), предазнячеипыми для переноса деталей (издеий) из накопителя 5 в зону б обработки (сборки). Штоковые полости 2 гидроцилиндов связаны, посредством чтрехпозиционного аспределителя 7, имеющего общий слив з штоковых полостей в сливную магистраль 8. Бесштоковые полости 3 гидроцилиндров св,язаны посредством трехпозиционного распределителя 9 с напорной магистралью 10 Автооператор работает следующим образом.
При обслуживании автооператором оборудования непременным условием является поочередное нахождение его рук в зоне 6 обработки. При включении электромагнита Эм трехпозиционный распределитель 7 п реключается в крайнюю правую-(по чертежу; позицию, соединяя при этом штрковую полость 2 левого гидроцилиндра с напорной мaгиctpaлью 10. Одновременно включением элемента Эм2 .распределитель -9 переключается в крайнюю левую (по чертежу) позицию, соединяя бесщтоковую полость 3 левого, гидроцилиндра со сливной магистралью 8. Левая рука 4 автооператора перемещается из накопителя 5 в зону 6 обработки (сборки).. При этом рабочая жидкость из напорной магистрали 10 поступает в бесштоковую полость 3 правого гидроцилиндр,а, что исключаетперемещение правой руки 4 в зону 6 обработки (сборки). При включении электромагнита ЭмЗ трехпозиционный распределитель 7 переключается в крайню.ю левую (по чертежу) позицию, соединяя штоковую полость 2 Правого гидроцилиндра с напорной магистралью Ш. Одновременно включается электромагнит Эм4, и трехпозиционный распределитель 9 переключается в крайнюю правую (по чертежу) позицию , соединяя бесштоковую полость 3 правого гйдроцилиндра со сливной, магистралью 8. Правая рука 4 автооператора перэмещается из позиций накопителя 5 в зону б обработки, при этом рабочая жидкость из напорной магистрали
0 поступает в бесштоковую полость 3 левого гидроцилиндра, что исключ41ет перемещение левой руки 4 в зону 6 обработки. Таким образом полностью исключается одновременное нахождение рук 4 в зоне 6 обработки
(сборки). В случае необходимости одновременного нахождения рук 4 в накопителе 5 электромагниты Эм.1, Эм2, ЭмЗ и Эм4 распределителей 7 и 9 обесточиваются, что привадит к переключению распределителей 7 и 9 в среднее (по чертежу) положение. При этом
рабочая жидкость из магистрали 10 поступает в бесШтоковые полости 3 обоих гидроцилиндров;- а их штоковые полости 2 соединяются со-сливной магистралью 8, и оба гидроцилиндра перемещают руки 4 в накопитель 5.
Благодаря предложенному изобретению упрощается конструкция привода автооператора за счет сокращения количества элементов (золотника, клапана и др.) и повышается надежность блокировки рук автооператора.
Формула изобретения
Автоо 1,ера,тор, выполненный в виде сило вых одноШтоковых гидроцилиндров, штоки которых Связаны с руками автооператора, а полости цилиндров связаны с напорной и сливной магистралями через средство для
блокировки одновременного нахождения рук в рабочей збне, отличающийся тем, чти, с целью повыщения надежности блокировки и упрощения конструкции, средство для блокировки вьшолнено в виде трехпозиционного распределителя, связывающего бесштоковые полости гйдроцилиндров с напорной магнстралью в 01ДНОЙ Из позиций.
Источники информации, принятые во внимание при экспертизе
1. Волчкевич А. И. Автооператоры. М., 1974, С. 174.; ,
2. Авторское свидетельство СССР JMb 621573, кл. В 253 19/00, 1976.
-fe
n 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1977 |
|
SU621573A1 |
| Автооператор | 1978 |
|
SU860998A1 |
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Гидравлический привод металлорежущего станка | 1978 |
|
SU779004A1 |
| Гидросистема управления исполнительнымОРгАНОМ CTAHKA | 1979 |
|
SU827865A1 |
| Механизм подъема кузова транспортного средства | 1990 |
|
SU1789373A1 |
| Гидросистема металлорежущего станка | 1977 |
|
SU659356A1 |
| Гидрофицированный сдвоенный протяжной станок | 1976 |
|
SU616071A1 |
| Гидравлический однопозиционный пресс одностороннего прессования | 1960 |
|
SU147120A1 |
Г
i
