корпзса, что лри неблагоприятном соотношении внешних сил, действующих на колесо, может Вызвать его откат.
Наиболее близким ,к данному изобретеHi 0|ijj jf известное устройсгао - Е« ШЮрХ1М..-бл(кирующий механизм выполнен в виде трехзвенного планетарного механизма, солнечная шестерня которого соединена с валом двигателя, водило - с входным валом тягового редуктора, а эпицикл - посредством дополнительно введеиного редуктора с первым рычагом, .причем эиицикл и водило снабжены управляемыми тормозами 14. В этом устройстве неподвижность колеса ла этапе переноса корпуса обеспечивается жесткой кинематической связью элементов привода. Однако это устройство также имеет недостатки, которые заключаются в следуюш,ем:
-часть тягового редуктора, расположенная в первом и втором рычагах, может быть выполнена только в виде рядного редЗКтора, что является неоптимальпым по компоновочным соображениям;
-мош.ность тягового редуктора передается через обш.ий шарнир двух рычагоз, который может быть загружен значительными внешними силами, что может привести к перекосам осей шестерен, а значит, в конечном счете, к уменьшению надежности работы элементов тягового редуктора.
Целью настоящего изобретения является повышение надежности за счет улучшения его комноновки.
Указанная цель достигается тем, что второй рычаг снабжен пустотелой осью, которая установлена шарнирно в ступице колеса, а двигатель, блокирующий механизм, тяговый и донолнительный редукторы расположены внутри упомянутой оси, причем корпус двигателя снабжен кинематической передачей, связывающей его с корпусом транспортного средства, а также тем, что кинематическая нередача вынолнена в виде трех шестерен, расположенных в нолости второго рычага, одна из которых установлена жестко на корпусе двигателя, вторая- промежуточная, а третья жестко соединена с первым рычагом, причем передаточное отношение от третьей щестерни к первой равно двум.
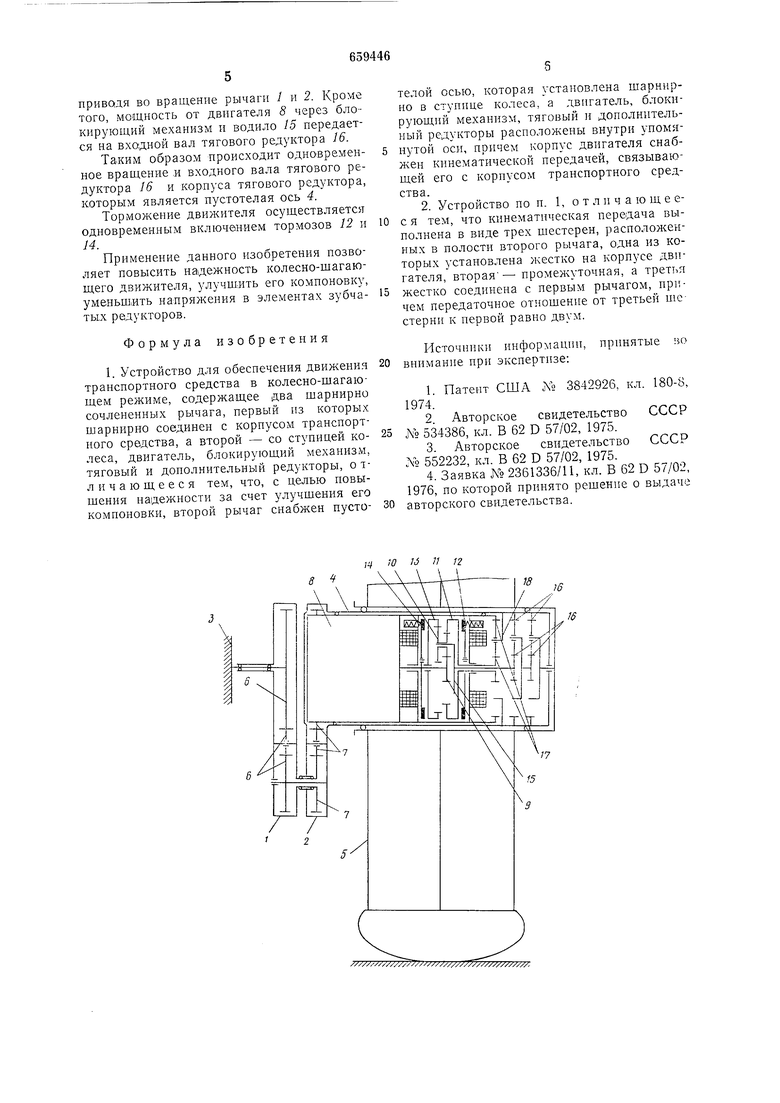
Кинематическая схема предлагаемого устройства изображена на чертеже. Устройство состоит из двух шарнирно соединенных рычагов 1 и 2. Первый рычаг 1 свободным концом установлен шарнирно на корпусе транспортного средства. На конце второго рычага 2 закреплена пустотелая ось 4, которая установлена шарнирно в ступице колеса 5.
Рычаги 1 и 2 кинематически связаны между собой с помощью редуктора 6 с передаточным отношением 0,5.
Рычаг / с помощью редуктора 7 с передаточным отношением равным двум, связан с корпусом двигателя 8, который установлен шарнирно в пустотелой оси 4.
Выгодной вал двигателя 8 соединен с солнечной шестерней 9 блокирующего механизма. Двойной сателлит 10 входит в зацепление с эпициклом 11, который снабжен управляемым тормозом 12, и вторым эпициклом }3, который снабжен унравляемым тормозом 14. Водило 15 блокирующего механизма соединено с входным валом тягового редуктора 16, выходной вал которого соединен со ступицей колеса 5. Эпицикл 11 блокирующего механизма соединен с входным валом дополнительного редуктора
17, выход которого (водило 18) соединен с пустотелой осью 4 рычага 2.
Работа устройства в колесно-шагающем режиме цсуществляется следующим образом. При включении тормоза 12 эпицикл 1
соединяется с корпусом двигателя 8. При включении двигателя 8 вся мощность через блокирующий мехаиизм и тяговый редуктор 16 передается к колес/} 5. Тормоз 14 при этом выключен. Движитель работает в колесном режиме. Реактивный момент, возникающий от редукции в тяговом редукторе и блокирующем механизме, передается на корпус двигателя 8, а затем на кориус транспортного средства, так как если передаточное отнощение редуктора 7 равно двум, а ре|дуктора 6 равно 0,5, то корпус двигателя 5 связан с корпусом транспортного средства 3 плосконараллельно.
В колесном режиме рычаг 2 не вращается, так как он связан с корпусом двигателя 8.
Для реализации этапа выноса колеса, ирн работе в колесно-шагающем режиме, выключаются оба тормоза 12 и 14. При
этом, между эпициклом //и водилом 15, а также между выходным валом тягового редуктора 16 и его корпусом (которым является пустотелая ось 4) и, следовательно, между соединенными с этими звеньями рычагом 2 и колесом 5 устанавливается дифференциальная связь так, что вращаются и второй рычаг и колесо. Колесо перемещается как ведущее, от момента на колесе, и как толкаемое, от силы на конце второго
рычага, причем чем больще сила сопротивления качению колеса, тем больше момент на колесе и тем больше толкающая сила. При этом, реактивный момент, возникающий на корпусе двигателя 8, передается
через редукторы 5 и 7 на корпус транспортного средства, а сам корпус двигателя 8 совершает нлоскопараллельные перемещения.
Для реализации этапа выноса корпуса
тормоз 12 выключается, а тормоз 14 включается. При этом, водило 15 оказывается соединенным с корпусом двигателя 8. Вся мощность двигателя 8 через блокирующий механизм, эпицикл // и дополнительный редуктор 17 передается на пустотелую ось 4,
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
