(5) СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЯЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИШ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| Устройство для управления рабочим торможением одноконцевой шахтной подъемной машиной | 1982 |
|
SU1181971A1 |
| Способ дискретного управления тормозом шахтной подъемной машины | 1989 |
|
SU1715705A1 |
| Устройство управления предохранительным торможением шахтных подъемных установок | 1980 |
|
SU975564A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
1
Изобретение относится к шахтному подъему, а более конкретно к управлению торможением шахтных подъемных машин.
При резком включении машинистом рабочего тормоза вследствие приложения максимального значения тормозного момента с максимальной скоростью его нарастания может быть набегание подъемного сосуда на канат, что опасно большими динамическими нагрузками на элементы подъемной машины и возможностью обрыва подъемного сосуда.
Известен способ управления процессом торможения подъемников и устройство для осуществления этого способа, характеризуемый трехступенчатым диапазоном изменения .скорости, причем на второй ступени торможения величина скорости подъемника постоянна. Способ и устройство позволяет снизить расстояния, проходимые с замедленной скоростью Г П.
Однако этот способ не позврляет получить необходимую зависимость изменения тормозного момента для обеспечения безопасного замедления подъемного сосуда из условий набегания его на канат при недопустимых действиях машиниста в режиме рабочего тор можения, вследствие которых может быть приложено максимальное значение тормозного момента с максимальной скоростью его нарастания.
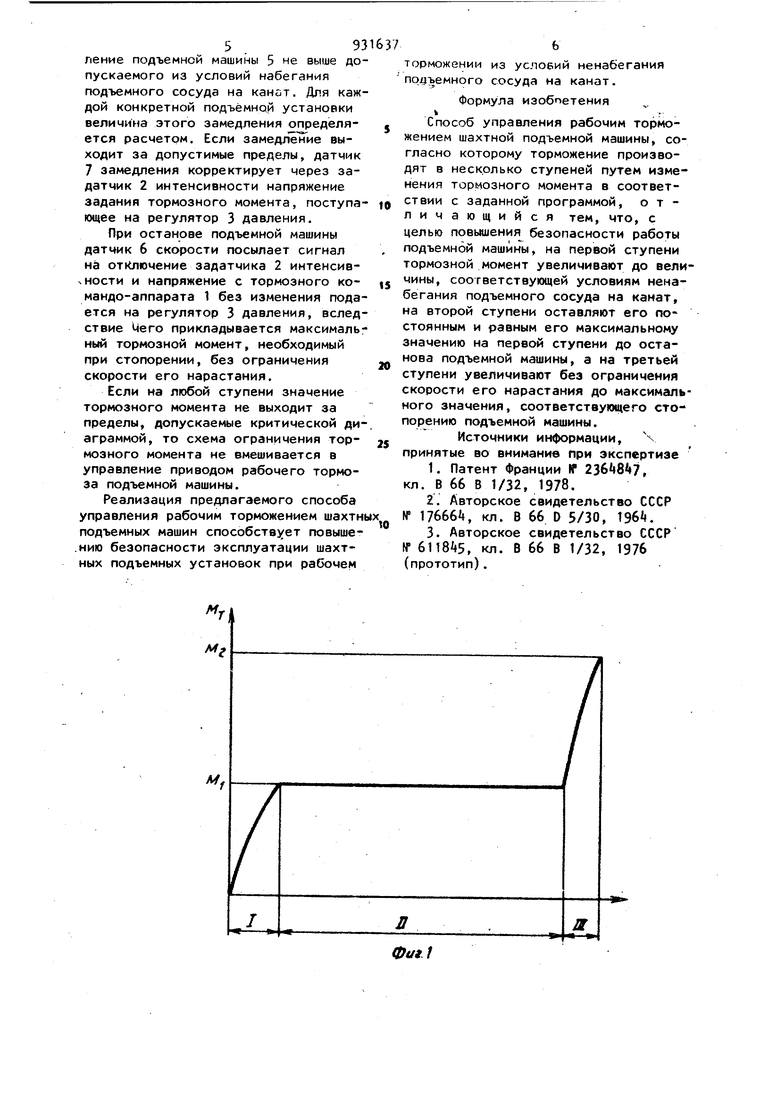
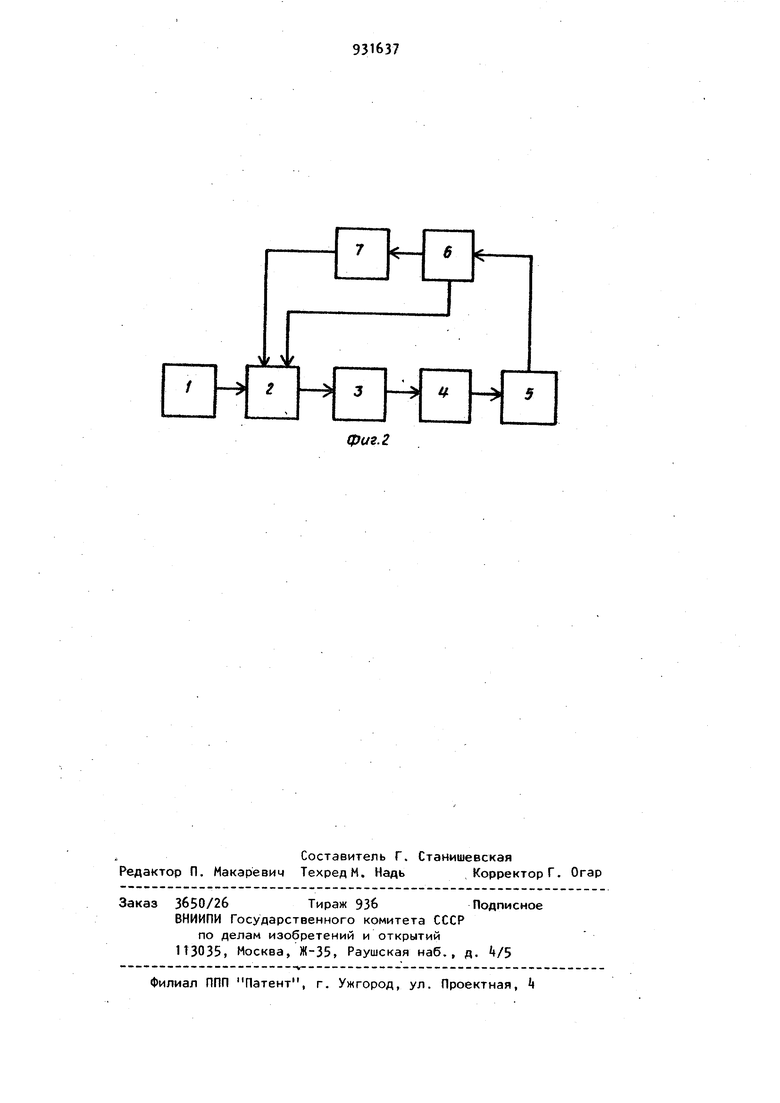
Известно также взрывобезопасное электрогидравлическое устройство для управления рабочим и предохранительным приводом тормоза шахтных подъемных установок с одним тормозным цилиндром, которое выполнено в сочетании взрывобезопасного электрогидравлического регулятора давления для рабочего торможения и взрывобезопвсного электрогидроусилителя для предохранительного торможения установленных раздельно йа выходах устройств, скомпонованных и связан39ных в одну систему посредством зашун тированных пружинных клапанов, смонтированных раздельно на сливах из электрорегулятора давления и из электрогидроусилителя Г2Э. Однако известное устройство, реализующее один из возможных способов управления рабочим торможением шахтных подъемных машин, не позволяет получить характеристику тормозного момента, обеспечивакхдую безопасную эксплуатацию рабочего тормоза. Это объясняется тем, что величина тормоз ного момента на всем пути торможения возрастает и значение его может стат большим, чем допускается из условий набегания подъемного сосуда на канат Если скорость нарастания тормозного момента уменьшить так, чтобы величина тормозного момента не превышала допустимой по условиям набегания подъемного сосуда на канат, то значе ние замедления подъемной машины может оказаться меньшим, чем это требуется и возникает опасность переподъема. Известен способ управления рабочим тороншением шахтной подъемной ма шины, согласно которому торможение производят в несколько ступеней путем изменения тормозного момента в соответствии с заданной J poгpaммoй Однако этот способ также не позволяет получить необходимую зависимость изменения тормозного момента для обеспечения безопасного замедления из условий набегания подъемного сосуда на канат. Цель изобретения - повышение безопасности работы подъемной машины. Эта цель достигается тем, что на первой ступени тормозной момент увеличивают до величины, соответствующей условиям ненабегания подъемного сосуда на канат, на второй ступени оставляют его постоянным и равным его максимальному значению на первой ступени до останова подъемной машины, а на третьей ступени увеличивают без ограничения скорости его нараста ния до максимального значения, соответствующего стопорению подъемной ма шины. На фиг. 1 даны диаграммы изменени скорости тормозного момента; на фиг. 2 - блок-схема устройства управления рабочим торможением шахтных подъемных машин. На первой ступени интенсивчость нарастания тормозного момента ограничивают задатчиком интенсивности из условий ненабегания подъемного сосуда на канат. При этом значение тормозного момента увеличивают от нуля до величины М, Интенсивность нарастания и максимальную величину тормозного момента М на первой ступени определяют для каждой конкретной подъемной установки расчетом. Характеристика тормозного момент на этой ступени соответствует участку I кривой. На второй ступени величину тормозного момента оставляют постоянной и равной ее максимальному значению М. на первой ступени. Продолжительность второй ступени определяется от конца ериода нарастания тормозного момента на первой ступени до останова подъемной машины {участок II кривой) . На третьей ступени задатчик интенсивности отключают и интенсивность нарастания тормозного момента до его максимального значения не ограничивают (участок III кривой). Практически предлагаемый способ, реализуется применением блок-схемы устройства управления рабочим торможением. Напряжение задания тормозного момента с тормозного командо-аппарата 1 через задатчик 2 интенсивности поступает на регулятор 3 давления, который управляет приводом рабочего тормоза k подъемной машины 5. Информация о скорости движения и замедления подъемной машины 5 выбирается датчиком 6 скорости и датчиком 7 замедления, кинематически связанным с органом навивки подъемной машины 5. Эта информация служит управляющим сигналом для задатчика 2 интенсивности. При остановленной подъемной машине 5 сигнал от датчиков6 скорости Поступает на задатчик 2 интенсивносги, который в этом случае не оказывает влияния на характер изменения и величину напряжения на регулятор 3 давления. При движущейся машине датчик 6 скорости включает задатчик 2 интенсивности, который ограничивает скорость нарастания, величину напряжения на регуляторе 3 давления, и, соответственно тормозной момент таким образом, чтобы обеспечить замед593пение подъемной машины 5 не выше допускаемого из условий набегания подъемного сосуда на канат. Для каждой конкретной подъёмней установки величина этого замедления опрецеляется расчетом. Если замедление выходит за допустимые пределы, датчик 7 замедления корректирует через задатчик 2 интенсивности напряжение задания тормозного момента, поступа ющее на регулятор 3 давления. При останове подъемной машины датчик 6 скорости посылает сигнал на отключение задатчика 2 интенсивчности и напряжение с тормозного командо-аппарата 1 без изменения пода ется на регулятор 3 давления, вслед ствие Uero прикладывается максималь ный тормозной момент, необходимый при стопорении, без ограничения скорости его нарастания. Если на любой ступени значение тормозного момента не выходит за пределы, допускаемые критической ди аграммой, то схема ограничения тормозного момента не вмешивается в управление приводом рабочего тормоза подъемной машины. Реализация предлагаемого способа управления рабочим торможением шахтн подъемных машин способствует повыше.нию безопасности эксплуатации шахтных подъемных установок при рабочем
Af,|
Mf . торможении из условий ненабегания по1)ъемного сосуда на канат. Формула изобпетения Способ управления рабочим торможением шахтной подъемной машины, согласно которому торможение производят в несколько ступеней путем изменения тормозного момента в соответствии с заданной программой, отличающийся тем, что, с целью повышения безопасности работы подъемной машины, на первой ступени тормозной момент увеличивают до величины, соответствующей условиям ненабегания подъемного сосуда на канат, на второй ступени оставляют его постоянным и равным его максимальному значению на первой ступени до останова подъемной машины, а на третьей ступени увеличивают без ограничения скорости его нарастания до максимгшьного значения, соответствующего стопорению подъемной машины. Ксточники информации, X принятые во внимание при экспертизе 1.Патент Франции N , кл. В 66 В 1/32, 1978. 2.Авторское свидетельство СССР № 17666, кл. В 66 D 5/30, ТЭб. 3.Авторское свидетельство СССР № , кл. В 66 В 1/32, 1976 (прототип).
А/.
фиг.2
