Изобретение относится к подъемным Устройствам, в частности к способам их торможения. По основному авт.св. 716960 известен способ торможения подъемных машин, заключающийся в том, что последонательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень тормозного момента, равную повеличине первой ступени, включают с интервалом времени, равным по.лупериоду .продольных колебаний ка- ката l.. Недостатком известного способа является низкая безопасность подъемной установки. Цель изобретения - уменьшение динамических усилий в канате после остановки подъемной машины. Указанная цель достигается тем, что при торможении подъемной машины согласно известному способу, заключающемуся в том, что последовательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень тормозного момента, равную по величи- , не первой ступени, включают с интернвалом времени, равном полупериоду продольных колебаний каната, вторую ступень тормозного момеьгта отключают при скорости машины,определяемой по формуле где V - скорость машины; F - тормозной момент, равный сумме первой и второй ступеней тормозного момента; Т - период колебаний каната; общая масса подъемной установки, а после остановки машины включают вторую ступень. Измене;ние усилий в канате после половины тормозного момента с:тупенью носит колебательный хара5 :тер с периодом колебаний,, определяeiviHM местоположением в стволе и степенью загрузки сосуда. В момент времени, равный половине периода колебаний сосуда на канате, с момента снятия половины тормозного момента сосуд минимально отклонен от положения равновесия. Под положением равновесия понимается положение сосуда при неподвижной подъемной установке (т.е. положение сосуда только под действием статической нагрузки). Усилия же в канате после остановки органа навивки растут с увеличением отклонения сосуда от положения рав ювесия в момент стопорения. Поэтому необходимо добиваться, чтобы стопорение органа навивки произошло именно через пол-периода колебаний сосуданы ки щие но ал гд то ур со ко вр 35 ни кла сту .лия . сум при буд При ет пе пр на канате с момента снятия полсовитормозного момента. На фиг. 1 и 2 представлены графипроцесса торможения иллюстрируюуказанный способ. Процесс торможения подъемной устаки описывается системой дифференциных уравнения m,x4c(x-) -F(t) lTi y4c{vj-xl 0, х,у - текущие значения линейных пефемещений органа навивки и сосуда, м; 1„,т„ - эквивалентные массы, сосредоточенные на окружности органа навивки и в центре сосуда, кг; - жесткость ветви каната, - тормозное усилие; t - время, с. При ступенчатом законе приложения мозного усилия F решение системы внений относительно замедления уда у будет cot, 1т1„4- m. CJ J--lll : ll - частота колеI frtvj баний, рад/с. На фиг, 1 показан требуемый заизменения тормозного усилия по мени. При приложении FJ/2 в канате возают динамические усилия (фиг.2): , if () Л- -1 По истечении 2 (j при дывается еще тормозное усилие пенью равной jl колебания усив канате. Под действием второй ступени истечении времени равного tf марное усилие в канате, вызванное ложением первой и второй ступеней, ет FI + р2 m V отметке времени tg предполагая снимать тормозное усилие стуью равной FT/2 . Колебания усилий этом - 2ul:: t °)-.
При времени t происходит остановка органа навивки машины (стопорение). В этот момент
).0.
Так как динамические усилия в кнате в данный момент времени (t.) равны нулю, это означает, что сосу находится в положении равновесия. Колебаний сосуда после остановки оргайа навивки не будет (нет силы, вызывающей эти колебания).
Таким образом, при торможении согласно указанному способу после остановки органа навивки динамические усилия в канате минимальные
(на фиг, 2 кривой OABCD показан закон изменения замедления сосуда).
Наложение тормозного усилия после остановки органа навивки производится для надежного стопорения и регламентировано правилами технической эксплуатации. Его приложение после остановки органа навивки не оказывает влияния на величины усилия / в канате.
0
Предлагаемый способ по сравнению с базовым объектом позволяет уменышить динамические нагрузки в-канатах, за счет чего повышаются безопасность и долговечность эксплуата5ции подъемных установок.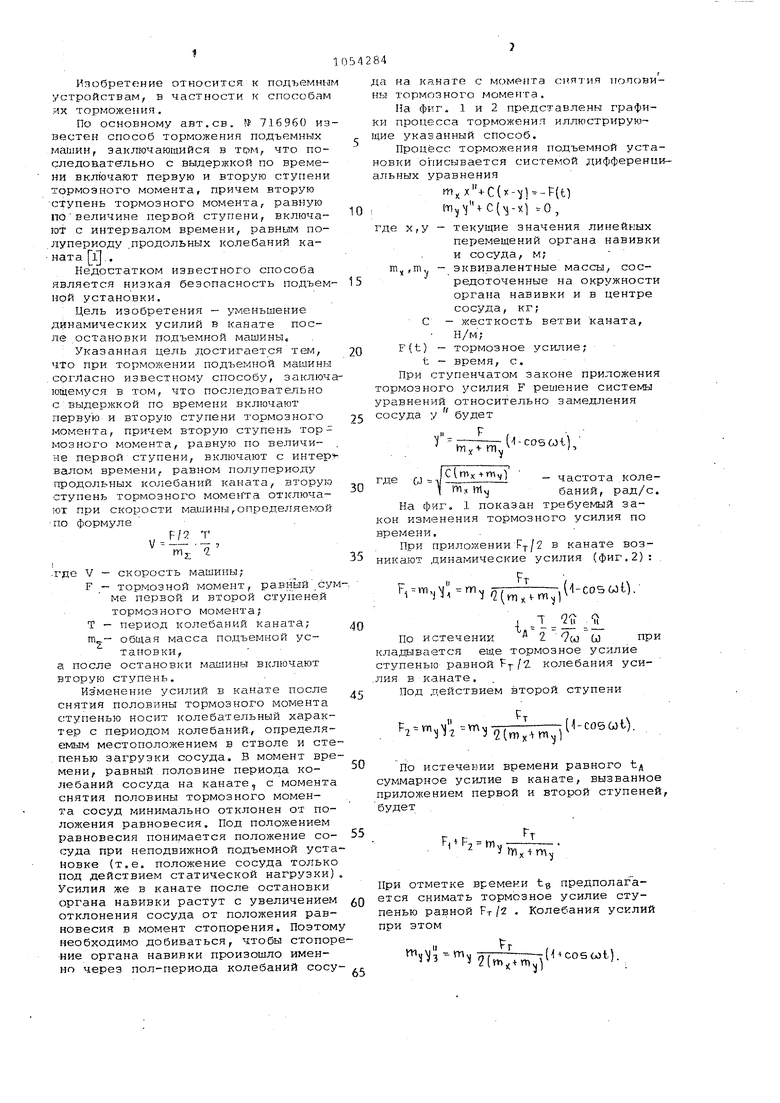

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Способ дискретного управления тормозом шахтной подъемной машины | 1989 |
|
SU1715705A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Способ управления рабочим торможением шахтной подъемной машины | 1980 |
|
SU931637A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| СПОСОБ ТОРМОЖЕНИЯ ПОДЪЕМНЫХ МАШИН | 2007 |
|
RU2342309C1 |
| Способ торможения подъемных машин | 1971 |
|
SU716960A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
СПОСОБ ТОРМОЖЕНИЯ ПОДЪЕМНОЙ МАШИНЫ по авт. св.№ 716960, .о тличающийся тем, что, с целью уменьшения динамических усиЛИЙ в канате после остановки подъемной машины, отключают вторую ступень тормозного момента при скорости машины, определяемой по формуле fll Т V ttij. Ч где mj. - общая масса подъемной установки; V - скорость машины; F- тормозной момент, равный сумме первой и второй ступеней тормозного момента; Т - период колебаний каната, а после остановки машины включают вторую ступень. (2 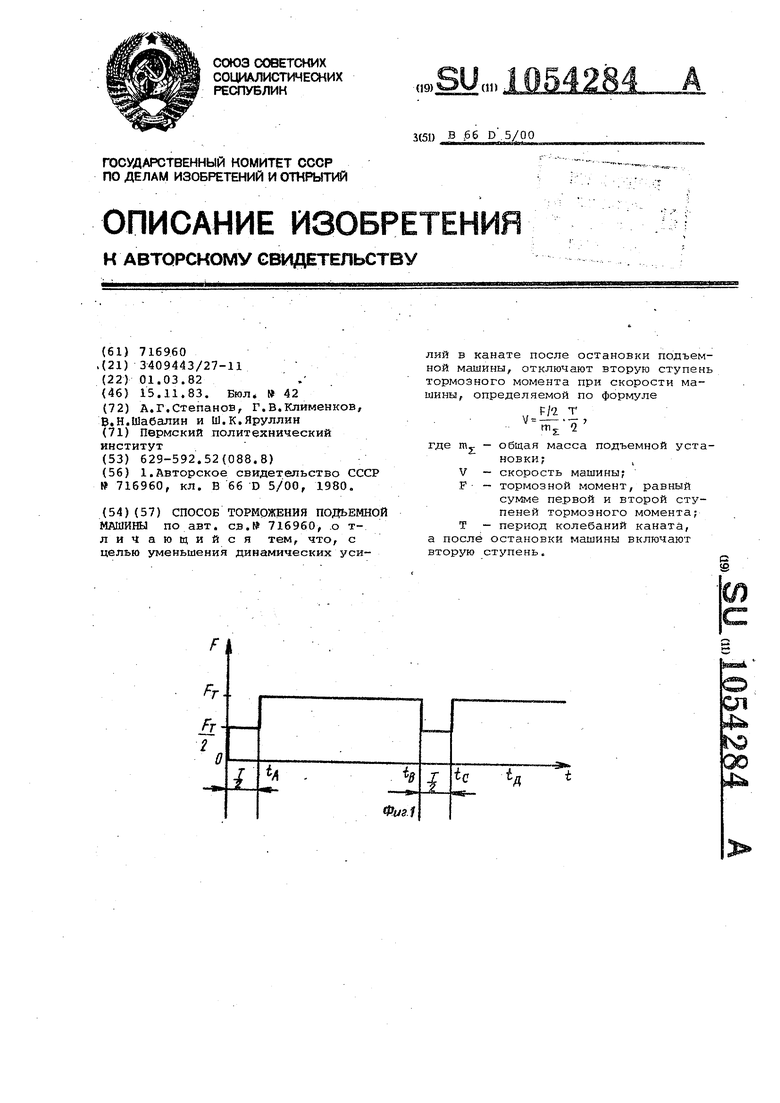
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
