Изобретение относится к оборудованию для производства силикатного кирпича и может быть использовано в автоматах-укладчиках силикатного кирпича и керамических камней.
Цель изобретения - повышение точности и надежности работы.
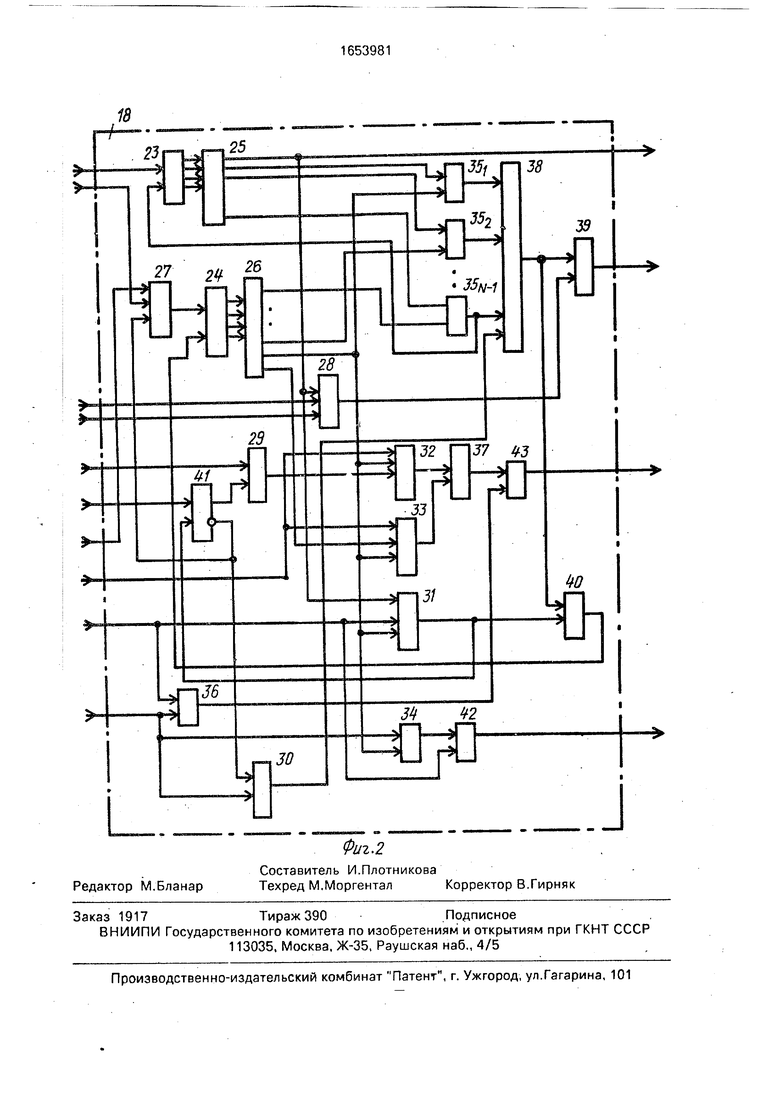
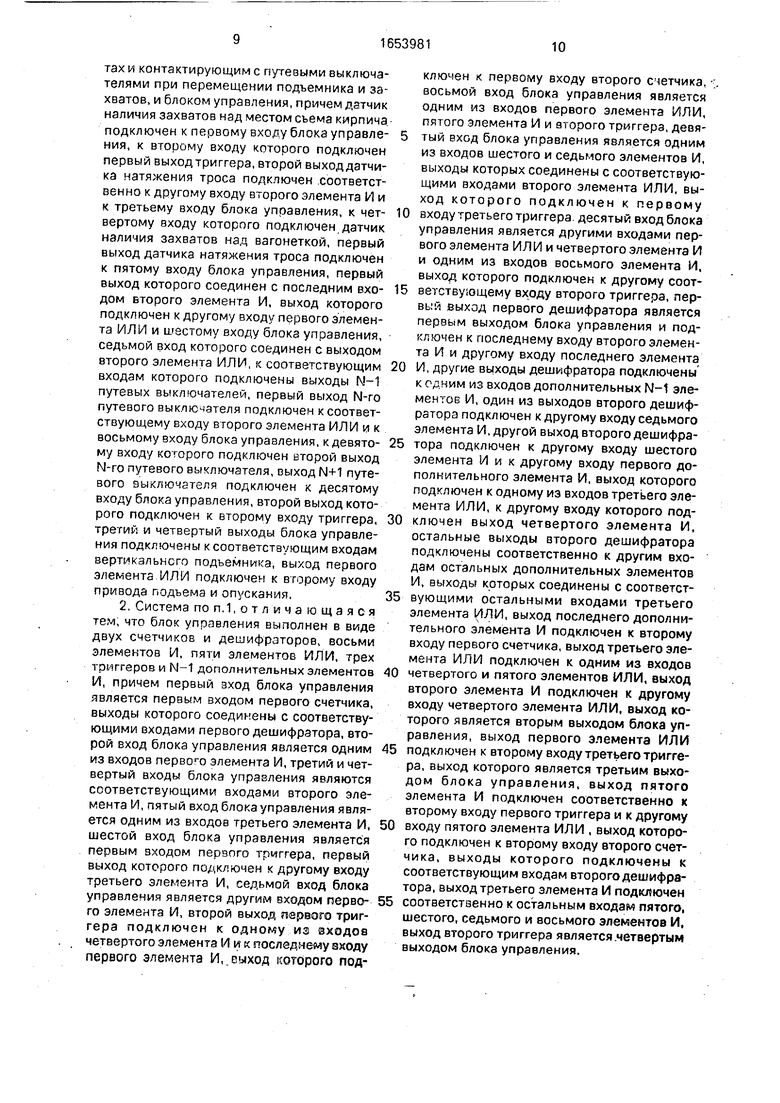
На фиг.1 изображена блок-схема системы автоматического управления укладкой кирпича; на фиг.2 - функциональная схема блока управления.
Система автоматического управления укладкой кирпича, работающая совместно с тележкой 1, расположенной с возможностью горизонтального перемещения на рельсовом пути 2 и захватами 3, соединенными с помощью троса 4 с приводом 5 подъема и опускания, содержит датчики разжима 6 захватов 3, наличия 7 захватов 3 над вагонеткой 8 и наличия 9 захватов 3 над местом съема кирпича 10, натяжения тросса 11 захватов 3, логические элементы И 12 13, ИЛИ 14, 15, триггер 16, вертикальный подъемник 17, расположенный на тележке 1, блок 18 управления, плоскую вертикальную пластину 19, жестко закрепленную на вертикальном подъемнике 17, путевые выключатели 20i, 20220м+1 (где N - число слоев
кирпича, укладываемых на вагонетку 8). размещенные на вертикальной пластине 19 со сдвигом по вертикали друг от друга на высоту слоя кирпича и контактирующие с кулачком 21, закрепленным на захватах 3, и транспортер 22.
Блок 18 управления содержит первый 23 и второй 24 двоичные счетчики, дешифраторы 25 и 26, элементы И 27-34, дополнительные элементы И 35i, 35а ... 35N-1 ИЛИ 36-40 и триггеры 41 и 43.
Кирпичи 10 комплектуются на транспортере 22 и снимаются с него захватами 3, которые вертикально перемещаются с помощью тросса 4 приводом 5, расположенным на тележке 1. Последняя установлена на рельсовом пути 2. Кирпичи 10 укладываются в N слоев на вагонетку 8, над которой установлен датчик 7 наличия захватов 3 над вагонеткой 8. Датчик 9 наличия захватов 3 над местом съема находится у транспортера 22. Привод 5 снабжен датчиком 11 натяжения тросса захватов 3. Захваты 3 снабжены кулачком 21, который выполнен в виде Г-об- разной пластины, вертикально установленной на захватах 3. Последние снабжены датчиком 6 разжима захватов 3, который может быть выполнен в виде реле давления (у пневмозахватов) либо в виде реле времени. На тележке 1 установлен вертикальный подъемник 17, на котором жестко закреплена вертикальная пластина 19.
Система автоматического управления укладкой кирпича работает следующим образом.
При съеме кирпича 10с транспортера 22
захватами 3 сигнал с датчика 9 обеспечивает включение триггера 16. Тележка 1, передвигаясь по рельсовому пути 2, переносит кирпичи 10 к вагонетке 8, где воздействует на датчик 7. При этом на выходе датчика 7
0 имеется сигнал. Поскольку захваты 3 свободно подвешены на троссе 4, на прямом выходе датчика 11 имеется сигнал. Наличие сигналов с датчиков 7 и 11 и триггера 16 на входах элемента И 13 обеспечивает на его
5 выходе появление сигналов, включающего привод 5 на опускание захватов 3 на вагонетку 8. При опускании захватов 3 на вагонетку 8 купачок 21 контактирует (замыкает) последовательно с путевыми выключателя0 ми 20i, 202 . На прямых выходах
путевых выключателей 20i, 20220N при
их взаимодействии с кулачком 21 появляются сигналы, проходящие через элемент ИЛИ 15 на седьмой вход блока 18 управления.
5 При замыкании путевого выключателя 20м появляется сигнал на его прямом выходе и исчезает сигнал на его инверсном выходе, при замыкании путевого выключателя 20N+1 на его прямом выходе появляется сигнал.
0 Сигналы с инверсного и прямого выходов 20rj путевого выключателя и прямого выхода 20мч путевого выключателя поступают на восьмой, девятый, десятый входы блока 18 управления.
5
При у кладке на вагонетку 8 первого слоя кирпичей 10 захваты 3 опускаются до соприкосновения переносимого слоя с днищем вагонетки 8. При этом подвеска захватов 3
0 разгружается и воздействует на датчик 11, с прямого выхода которого сигнал исчезает, а на инверсном выходе появляется. Одновременно появляется сигнал на втором выходе блока 18 управления, переводящий триггер
5 16 в исходное состояние. При первом случае, укладываемого на вагонетку 8, имеется сигнал на первом выходе блока 18 управления, который вместе с сигналами с инверсных выходов датчика 11 и триггера 16
0 обеспечивает появление на выходе элемента И 12 сигнала, проходящего через элемент ИЛИ 14 на второй вход привода 5, при этом захваты 3 поднимаются до момента нового нагружения подвески. Сигнал с инверсного
5 выхода датчика 11 исчезает и привод 5 отключается и захваты 3 останавливаются, при этом при зазоре 2-3 мм между первым укладываемым слоем и днищем вагонетки 8. После этого при укладке первого слоя на вагонетку 8 по сигналам с третьего и четвертого выходов блока 18 управления начинает работать вертикальный подъемник 17.
Вертикальный подъемник 17 при наличии сигнала нэ первом входе (т.е. на третьем выходе блока 18) поднимает пластину 19. а при наличии сигнала на втором входе (т.е. на четвертом выходе блока 18) опускает ее. Работа подъемника 17 продолжается до тех пор, пока на прямом выходе 20ы путевого выключателя не появится сигнал (т.е. до тех пор, пока не будет найдено положение планки 19, соответствующее уровню остановки захватов 3 при укладке первого слоя на вагонетку 8). При этом уровне кулачком 21 должен быть замкнут путевой выключатель 20N.
После отработки вертикальным подъемником 17 необходимого положения включается разжим захватов 3 (не показано). После окончания разжима захватов 3 с датчика б разжима захватов 3 подается на первый вход элемента ИЛИ 14 сигнал, и захваты 3 с помощью тросса 4 и привода 5 поднимаются в верхнее положение и тележка 1 перемещается к транспортеру 22. При укладке второго, третьегоN-ro слоев на вагонетку 8 вертикальный подъемник 17 остается неподвижным.
В связи с тем, что путевые выключатели 20 расположены на планке 19 со сдвигом на высоту слоя кирпича L друг относительно
друга, то при укладке второго, третьего
N-ro слоев на вагонетку 8 останов захватов 3 производится при замыкании кулачком 21 соответственно путевых выключателей
20rg-i, 20N-2 20i. При этом захваты 3
останавливаются сразу при зазоре 2-3 мм между укладываемым и уложенным слоями.
При укладке второго, третьего, ..., N-ro слоев сразу же после остановки захватов 3 с переносимым слоем включается разжим захватов 3 (при этом трос 4 остается всегда нагруженным, двойного включения привода 5 на подъем захватов 3 над вагонеткой 8 не производится).
При замыкании путевого выключателя 20-N-n (т.е. при нахождении захватов 3 ниже уровня максимально возможного нижнего положения днища вагонетки 8) производится останов захватов 3.
Блок 18 управления вертикальным подъемником 17 работает следующим образом.
Счетчик 23 производит счет сигналов, поступающих на первый вход блока 18 (т.е. количества отходов тележки 1 от места съема). На выходах счетчика 23 в каждый момент времени имеется двоичный код номера (1, 2, ..., N) переносимого слоя. В каждый момент времени на одном из выходов, номер которою иавен номеру перечо- симого слоя, дешифратора 25 имеется сигнал. При наличии сигнала на втором входе блока 18(т.е. при наличии сигнгпа с прямого выхода триггера 1G) при опускании захватов 3 счетчик 24 производит счет сигналов, поступающих через элемент И 27 с седьмого входа блока 18 (т.е. с выхода элемента ИЛИ 15). При этом на выходах счетчика 24 появ0 ляется последовательно двоичный код номера (1,2,3N) путевого выключателя 20,
замкнутого кулачком 21. На одном из выходов, номео которого равен номеру замкнутого путевого выключателя 20.
5 дешифратора 26 появляется сигнал.
При укладке первого слоя при наличии сигнопов на третьем и четвертом входах блока 1Ь (т.е. при нахождении тележги 1 у вагонетки 8 и после касания захватов 3 дни0 ща пагонетки 8) на выходе элемента И 28 пояаляется сигнал, проходящий через элемент ИЛИ 39 нэ второй выход блока 18 управления, при этом триггер 16 возвращается з исходное состояниь и про5 хождение сигналов с выхода элемента ИЛИ 15 через элемент ИЛИ 27 прекращается. При наличии сигнала на шестом входе блока 18 (т е. при наличии сигнала на выходе элемента И 12, который возникает при укладке
0 только первого слоя при касании захватов 3 днища вагонетки 8) триггер 41 срабатывает и на его прямом выходе появляется, а на инверсном выходе сигнал исчезает. При этом после нагружения троса 4. т.е. при при5 ходе сигнала с прямого выхода датчика 11 на пятый вход блока 18 управления, на выходе элемента И 29 появляется сигнал, поступающий на соответствующий вход элементов И 31-33 и на соответствующий
0 вход элемента И 34.
Касание захватов 3 днища вагонетки 8 при укладке первого слоя может произойти при сигналах на N-1-м или N выходах дешифратора 26. Однако после нагружения
5 троса 4, т.е. после подъема захватов 3 при укладке первого слоя, положение захватов 3 по сравнению с хранящимся в счетчике 24 положением, изменяется. При этом путевой выключатель 20N может оказаться ввиду
0 разной высоты вагонеток 8 разомкнутым, т.е. имеется сигнал на инверсном выходе 20м путевого выключателя, поступающий на восьмой вход блока 18. Наличие сигналов на N-1-м, N выходах дешифратора 26, на выхо5 де элемента И 29 и на восьмом входе блока 18 приводит к появлению сигналов нэ выходах элементов И 32, 33, ИЛИ 37, при этом триггер 43 срабатывает и на его прямом выходе (и на третьем выходе блока 18) появляется сигнал. При этом вертикальный подьемник 17 поднимает пластину 19. При перемещении вверх пластины 19, при замыкании путевого выключателя 20ы сигнал на его инверсном выходе исчезает проявляется на его прямом выходе (т.е. на девятом входе блока 18). При этом сигналом с выхода элемента ИЛИ 36 триггер 43 возвращается в исходное состояние и подьемник 17 останавливается.
Одновременно появляется сигнал на выходе элемента И 31, поступающий на триггер 41 и через элемент ИЛИ 40 на счетчик 24, которые при этом (триггер 41 и счетчик 24) устанавливаются в исходное состояние. Если при опускании захватов 3 появится сигнал на прямом выходе 20м+1 путевого выключателя (т.е. захваты 3 опустились ниже путевого выключателя 20н на высоту LK слоя кирпича 10) и при этом не коснулись днища вагонетки 8 (т.е. сигнала на выходе элемента И 12 не было), то на выходе элемента И 30 появляется сигнал, проходящий через элементы ИЛИ 38-40 на второй выход блока 18 (сброс триггера 16) на счетчик 24. Сигнал с выхода элемента И 30 может быть использован для сигнализации об отсутствии вагонетки 8.
Если после натяжения троса 4 при укладке первого слоя и при движении планки основания 19 (подъемника 17) вверх появляется сигнал на прямом выходе 20м-и путевого выключателя (т.е. кулачок4 21 после натяжении троса 4 находится между путевыми выключателями 20м, 20м+0, то сигналом с выхода элемента ИЛИ 36 триггер 43 переводится в исходное состояние (подъем подъемника 17 прекращается). Одновременно возникает сигнал на выходе элемента И 34, переводящий триггер 42 в единичное состояние, при этом на прямом входе триггера 42 и на четвертом выходе блока 18 появляется сигнал, при котором подъемник 17 перемещает пластину 19 вниз до замыкания кулачком 21 путевого выключателя 20м.
При укладке второго, третьегоN-ro
слоев появляются сигналы соответственно
на дополнительных элементах И 35i, 352
35кы, которые проходятчерез элемент ИЛИ 38 на элемент ИЛИ 39 (и далее на второй выход блока 18) и на элемент ИЛИ 40 (и далее на счетчик 24). При этом захваты 3 останавливаются и счетчик 24 переходит в исходное состояние.
При наличии сигнала на выходе элемента И 35N-1 (при укладке N-ro слоя) счетчик 23 переводится э исходное состояние и блок 18 готов к работе для укладки на следующую вагонетку 8.
При включение питания счетчики 23 и 24, триггеры 41-43 блока 18, а также триггер
16 устанавливаются в исходное состояние. При перемещении тележки 1 к вагонетке 8 при укладке первого слоя подъемник 17 устанавливается в крайнее нижнее исходное
состояние. Установление счетчиков 23 и 24, триггеров 16, 41, 42 и 43 и подъемника 17 в исходные состояния при включении питания, а также установление подъемника 17 в исходное состояние при перемещении тележки 1 к вагонетке при укладке первого слоя осуществляется внешними элементами (не показано).
В качестве путевых выключателей 20i, 2U2 20м+1 могут быть использованы серийно выпускаемые бесконтактные путевые выключатели типов БВК, КВП, КВД.
Таким образом, введение блока управления, вертикального подъемника, N+1 путевых выключателей, размещение их на
пластине с вертикальным перемещением повышает точность и надежность работы системы автоматического управления укладкой кирпича.
25
Формула изобретения
1. Система управления укладкой кирпи- чз на вагонетку, работающая совместно с тележкой и захватами, соединенными посредством троса с приводом подъема и опу- скания, расположенным на тележке, содержащая датчик разжима захватов, датчики наличия захватов над вагонеткой и над местом съема кирпича, датчик натяжения
троса, триггер, два элемента И и ИЛИ, причем датчик наличия захватов над местом съема кирпича подключен к первому входу триггера, первый выход которого подключен к одному из входов первого элемента И,
к другим входам которого подключены соответственно датчик наличия захватов над ва- гонеткой и первый выход датчика натяжения троса, выход первого элемента И соединен с первым входом привода подъема и опускания, второй выход триггера подключен к одному входу второго элемента И, датчик разжима захватов подключен к одному из входов первого элемента ИЛИ, отличающаяся тем, что, с целью
повышения точности и надежности работы системы, она снабжена установленным на тележке вертикальным подъемником с жестко закрепленной на нем плоской вертикальной пластиной, N + 1 путевыми
выключателями, где N - количество слоев кирпича, укладываемых на вагонетку, размещенными на плоской вертикальной пластине на расстоянии друг относительно друга по вертикали, равном высоте слоя кирпича, кулачком, закрепленным на захватах и контактирующим с путевыми выключателями при перемещении подъемника и за хватов, и блоком управления, причем датчик наличия захватов над местом съема кирпича подключен к первому входу блока управления, к второму входу которого подключен первый выход триггера, второй выход датчика натяжения троса подключен соответственно к другому входу в;орого .элемента И и х. третьему входу блока уппавления, к четвертому входу которого подключен датчик наличия захватов над вагонеткой, первый выход датчика натяжения троса подключен к пятому входу блока управления, первый выход которого соединен с последним РХО- дом второго элемента И, выход которого подключен к другому входу первого эпемен- тэ ИЛИ и шестому входу блока управления, седьмой вход которого соединен с выходом второго элемента ИЛИ, к соответствующим входам которого подключены выходы N-1 путевых выключатепей, первый выход N-ro путевого выключателя подключен к соответствующему входу второго элемента ИЛИ и к восьмому входу блока управления, к девятому входу когорого подключен второй выход N-ro путевого выключателя, выход N+1 путевого выключателя подключен к десятому входу блока управления, второй выход которого подключен к второму входу триггера, третий и четвертый выходы блока управления подключены к соответствующим входам вертим льне го подъемника, выход первого элемента ИЛИ подключен к вгоромч входу привода подъема и опускания.
2. Система по п. 1,отличающаяся тем, что блок уппавления выполнен в виде двух счетчиков и дешифраторов, восьми элементов И, пяти элементов ИЛИ, грех 1 риггеров и N-1 дополнительных элементов И, причем первый зход блока управления является первым входом первого счетчика, выходы которого соединены с соответствующими входами первого дешифратора, второй вход блока управления является одним из входов первого элемента И, третий и четвертый входы блока управления являются соответствующими входами второго чле- ментэ И, пятый вход блока управления является одним из входов третьего элемента И, шестой вход блока управления является первым вводом пепчпго тпиггера, первый выход которого подключен к другому входу третьего элемента И, седьмой вход блока управления является другим входом первого элемента И, второй выход первого триггера подключен к одному из входов четвертого элемента И и к последнему входу первого элемента И, оыход которого подключен к первому входу второго счетчика, восьмой вход блока управления является одним из входов первого элемента ИЛИ, пятого элемента И и ат орого триггера, девя- 5 тый вход блока управления является одним из входов шестого и седьмого элементов И, выходы которых соединены с соответствующими входами второго элемента ИЛИ, выход которого подключен к первому
0 входу третьего триггера десятый вход блока управления является другими входами первого элемента ИЛИ и четвертого элемента И и одним из входов восьмого элемента И, выход которого подключен к другому соот5 вечствующему входу второго триггера, первой выход первого дешифратора является первым выходом блока управления и подключен к последнему входу второго элемента И и другому входу последнего элемента
0 И, другие выходы дешифратора подключены к VHHM из входов дополнительных N-1 элементов И, один из выходов второго дешифратора подключен к другому входу седьмого элемента И, другой выход второго дешифра5 тора подключен к другому входу шестого элемента И и к другому входу первого дополнительного элемента И, выход которого подключен к одному из входов третьего элемента ИЛИ, к другому входу которого под0 ключей выход четвертого элемента И, остальные выходы второго дешифратора подключены соответственно к другим входам остальных дополнительных элементов И, выходы которых соединены с соответст5 вующими остальными входами третьего элемента ИЛИ, выход последнего дополнительного элемента И подключен к второму входу первого счетчика, выход третьего элемента ИЛИ подключен к одним из входов
0 четвертого и пятого элементов ИЛИ. выход второго элемента И подключен к другому входу четвертого элемента ИЛИ. выход которого является вторым выходам блока управления, выход первого элемента ИЛИ
5 подключен к второму входу третьего триггера, выход которого является третьим выходом блока управления, выход пятого элемента И подключен соответственно к второму входу первого триггера и к другому
0 входу пятого элемента ИЛИ , выход которого подключен к второму входу второго счетчика, выходы которого подключены к соответствующим входам второго дешифратора, выход третьего элемента И подключен
5 соответстзенно к остальным входам пятого. шестого, седьмого и восьмого элементов И, выход второго триггера является четвертым выходом блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Устройство для автоматического управления укладкой кирпича | 1983 |
|
SU1209544A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Устройство управления электродвигателем транспортера-накопителя автомата для укладки кирпича | 1989 |
|
SU1694391A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| Устройство для программного управления механизмами | 1986 |
|
SU1409972A1 |
| Система автоматического управления укладкой кирпича | 1977 |
|
SU662357A1 |
Изобретение относится к оборудованию для производства силикатного кирпича, жет быть использовано в автоматах-укладчиках силикатного кирпича и керамических камней и позволяет повысить точность и надежность в работе. Система содержит датчик 6 разжима захватов 3, датчик 7 наличия захватов 3 над вагонеткой 8, датчик 9 наличия захватов над местом съема кирпича, датчик 11 натяжения тросса захватов 3. логические элементы И 12 и 13, элементы ИЛИ 14 и 15, триггер 16, подъемник 17, блок 18 управления и путевые выключатели 20. 1 з.п. ф-лы, 2 ил. Ё О ел СА) О 00 Фиг.1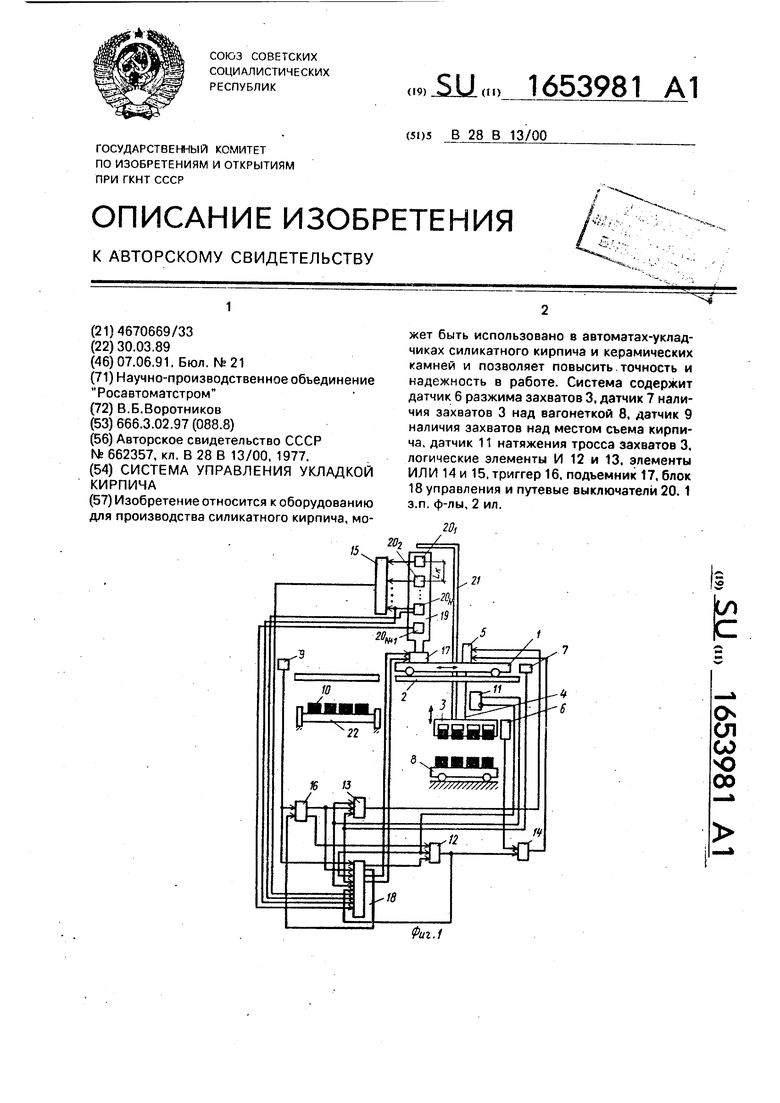
| Система автоматического управления укладкой кирпича | 1977 |
|
SU662357A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
