1
Изобретение относится к хлебопекарному оборудованию и предназначено для комплексной механизации хлебохранилищ и экспедиций предприятий хлебопекарной промышленности.
Известно устройство для останова штучных грузов перемешаемых цепью, включающее остановы на предварительной позиции 1.
Недостатком такого устройства является то, что оно не предназначено для операций по загрузке и выгрузке контейнеров при перемещении их по конвейеру партией.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому изобретению является устройство для останова и фиксации контейнеров, перемещаемых на катках цепью с толкателями, непрерывно движущейся по направляющим, содержащее расположенные по ходу движения цепи приводные остановы контейнеров на предварительной и рабочей позициях, взаимодействующие с толкателями, и фиксатор контейнера на рабочей позиции 2.
Однако это устройство не обеспечивает надежного перемещения контейнеров с предварительной позиции на рабочую позицию и вывод контейнера с рабочей позиции, так как-после окончания загрузки лотков и расфиксаций контейнера на рабочей позиции толкатели, находящиеся на непрерывно движущейся цепи, занимают неопределенное положение по отношению к остановам и раме контейнера из-за того, что сигнал на движение останова поступает от любого из катков, установленных с определенным интервалом на грузоведушей цепи, вследствие
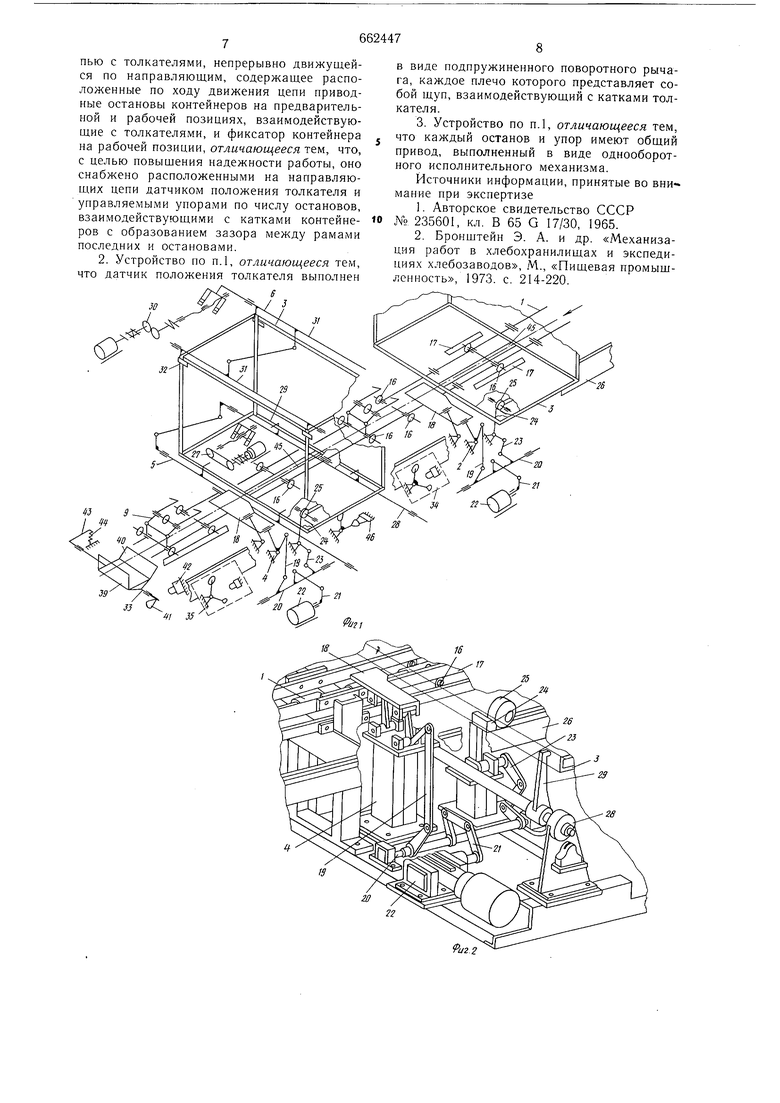
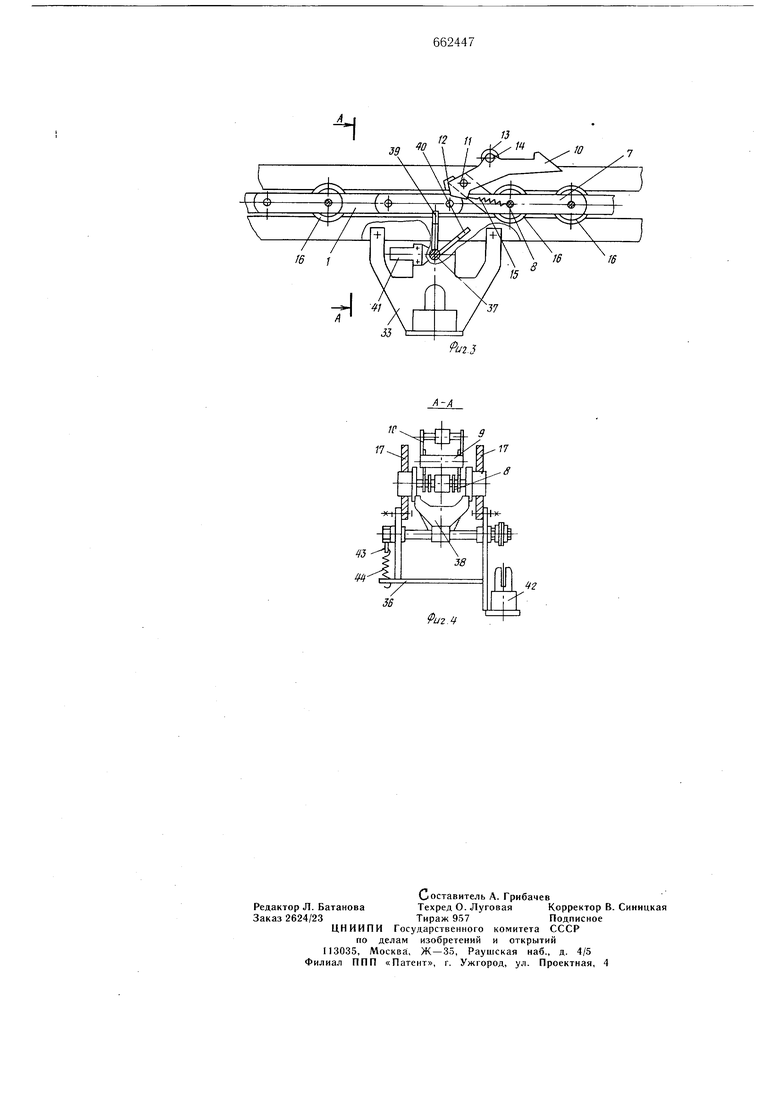
чего может иметь место столкновение движущегося контейнера с одним из остановов в момент открытия и закрытия последнего, что приведет к падению контейнера, столкновение перемещающегося останова с толкателем цепи, что приведет к деформациям и поломкам как останова, так и толкателя. Совмещение в каждом останове функций расцепителя толкателя с контейнером и упора рамы контейнера при динамических нагрузках от непрерывно движущейся цепи с толкателями и контейнеров приводит к ненадежной работе остановов, вследствие чего может иметь место наезд контейнера на останов, что приводит к отрыву катков контейнера от направляющих, его развороту и падению; неориентироанная фиксация рамы контейнера на рабочей поцизиции, что приводит к остановке агрегата. Целью изобретения является повышение надежности работы устройства. Цель достигается тем, что предлагаемое устройство снабжено расположенными на направляющих цепи датчиком положения толкателя и управляемыми упорами по числу остановов, взаимодействующими с катками контейнеров с образованием зазора между раЧшми последних и остановами. Датчик положения толкателя выполнен в виде подпружиненного двуплечего поворотного рычага, каждое плечо которого представляет собой щуп, взаимодействующий с катками толкателя. Каждый останов и упор имеют общий привод, выполненный в виде одноборотного исполнительного механизма. На фиг. 1 изображена кинематическая схема описываемого устройства; на фиг. 2 - останов контейнера на рабочей позиции; на фиг. 3 - цепь с толкателем и датчик положения толкателя, вид сбоку; на фиг. 4 - разрез по А-А на фиг. 3. Устройство состоит из непрерь вно движущейся грузоведущей цепи 1, останова 2, контейнера 3 на предварительной позиции, останова 4 контейнера 3 на рабочей позиции, фиксатора 5 низа и фиксатора 6 верха контейнера 3 на рабочей позиции. На специальных звеньях 7 цепи 1, отстоящих одно от другого на требуемом расстоянии, например двадцать щагов (в изготовленном опытном образце устройства это расстояние равно 2000 мм), соединенных попарно при помощи удлиненных валиков 8, смонтированы толкатели 9, каждый из которых состоит из двух кронштейнов 10 крючковидной формы, установленных на оси 11 и соединенных между собой уголками 12. На толкателе 9 установлен туп в виде ролика 13, сидящего на оси 14. Каждый толкатель связан пружиной 15 с валиком 8, на KOTOpo.vi вращаются катки 16 с ребордами, установленные на толкателе 9 с интервалом в один niar. Аналогичные катки 16, только установленные с интервалом в пять. шесть тагов на валиках 9, имеются по всей длине грузоведущей цепи 1 и перемещаясь по направляющи.м 17, предохрянают цепь 1 от провисания и перемещений в горизонтальной плоскости. Каждый из остановов 2 и 4 служит для отсоединения токателей 9 от нижних рам контейнеров 3 и представляет собой шарнирный четырехзвенник с пластиной 18, расположенной сбоку от грузоведущей цепи 1 и связанной рычажной передачей 19, образуюп1ей шарнирный параллелограмм, с ведущим валом 20, который через рычажную передачу 21 связан с однооборотным исполнительным механизмом 22, а через передачу 23 с упором 24, представляющим собой управляемый рычаг Г-образного сечения, имеющим два положения: одно - поднятое для упора катков 25 контейнера 3, движущегося по направляющим 26, второе утопленное, для пропускания контейнеров 3. Фиксатор 5 низа контейнера 4 расположен под контейнером на рабочей позиции и состоит из привода 27, выполненного в виде передачи винт-гайка, у которой поступательное движение гайки через вилку с пазами и рычаг преобразуется в качательное движение двух валов 28, на которых жестко закреплены четыре рычага 29. Фиксатор 6 верха контейнера 3 представляет аналогичное устройство, содержащее привод 30, два вала 31, на которых жестко закреплены четыре рычага 32. На направляющих 17 грузоведущей цени 1 расположен датчик 33 положения толкателя 9, а на направляющих 26 контейнеров 3 - датчики 34 и 35 управления соответственно остановами 2 и 4, а также датчик наличия контейнера 3 на рабочей позиции. Датчик 33 положения толкателя 9 состоит из корпуса 36, укрепленного на направляющих 17 цепи 1, на оси 37 которого жестко установлен двуплечий рычаг 38, каждое плечо 39 и 40 которого заканчивается щупом фигурной формы. На оси 37 с одной стороны укреплен лепесток 41, входящий при полном повороте рычага 38 в прорезь датчика 42, связанного с системой управления, а с другой - рычаг 43 с пружиной 44, связаный с корпусом 36 и удерживающие плечо 39 рычага 38 в вертикальном положении, а щуп рычага 40 ниже плоскости движения реборды катков 16. Устройство работает следующим образом. В исходном положении, когда на направляющих 26 нет контейнеров, останов 4 закрыт, и пластина 18 находится в крайнем верхнем положении - над цепью 1, соответствующем отсоединению толкателей 9 цепи 1 от контейнеров 3, упор 24 также закрыт и находится на направляющей 26, что соответствует положению задержки катка 25 контейнера 3 на рабочей позиции. Останов 2 открыт, пластина находится в крайнем нижнем положении сбоку от цепи 1 между направляющими 17 цепи и направляющими 26 для контейнеров ниже уровня рамы контейнеров 3; упор 24 также находится в крайнем нижнем положении вне зоны направляющих 26, т.е. при открытых останове 2 и уноре 24 на предварительной позиции контейнер 3 свободно может двигаться к рабочей позиции. Фиксатор 5 низа контейнера открыт, рычаги 29 находятся по уровню траектории ниже движения нижней рамы контейнера 3. Фиксатор 6 верха контейнера также открыт, рычаги 32 находятся в разведенном положении так, что контейнеры свободно проходят через зону рабочей позиции. Цепь 1 с толкателями 9 непрерывно движется в направлении, указанном стрелкой. При поступлении контейнеров на направляющие 26, ролик 13 толкателя 9, встречая раму контейнера 3, отклоняет кронштейны 10 толкателя 9 под контейнер, катясь по шинам 45, представляюш,им собой уголки, приваренные к нижней раме контейнеров 3. Шины удерживают захваты в утопленом положении. Аналогичную роль выполняет пластина 18 упоров. При закрытом останове нижняя плоскость пластины 18 является копиром, по которому скользит ролик 13 ш,упа толкателей 9, выводяший толкатели 9 из зацепления с контейнером 3. Толкатель 9 захватит первый контейнер 3 за передний уголок рамы, а так как останов 2 и упор 24 открыты, контейнер 3, пройдя предварительную позицию, воздействует своей рамой на датчик 34, в результате чего подается командный сигнал на однооборотный исполнительный механизм 22. Через рычажную передачу 21 ведуидий вал 20 и рычаги 19 пластина 18 перемещается в крайнее верхнее положение, соответствующее разъединению толкателя 9 с рамой контейнеров 3, а через рычаги 23 упор 24 перемещается в положение задержки катка 25 контейнеров 3, т.е. останов 2 и упор 24 заканчиваются за контейнером 3. Последуюший контейнер 3, ведомый толкателем 9, при поступлении на предварительную позицию остановится, так как пластина 18 останова 2 разъединит толкатель 9 и раму контейнера 3. Первый контейнер 3 продолжает перемещаться при помощи толкателя 9, а так как в исходном положении останов 4 закрыт и упор 24 поднят, пластина 18 останова 4 отсоединит толкатель 9 от контейнера 3. Каток 25 контейнера 3 взаимодействует с упором 24, и контейнер 3 останаливается на рабочей позиции, и при нажатии датчика 46 наличия контейнера сработает привод 27 фиксатора 5 низа контейнера, рычаги 29 сходятся и фиксируют нижнюю раму контейнера 3, причем, как в момент остановки контейнера 3, так и после фиксации низа контейнера, между пластиной 18 останова 4 и контейнером 3 сохранится небольшой зазор, являющийся еще зоной нечувствительности ролика 13 толкателя 9. Таким образом, рама контейнера 3 фактически не взаимодействует с пластиной 18 останова 4. Затем срабатывает привод 30 фиксатора 6 вверх контейнера, рычаги 32 сходятся и фиксируют верх контейнера 3. Последний готов к проведению рабочих операций. По сигналу об окончании операций на рабочей позиции (например, загрузки лотков в контейнер 3) срабатывает привод 30 фиксатора верха контейнера 6, рычаги 32 отходят от контейнера 3, затем утапливаются под контейнер 3 рычаги 29 фиксатора низа контейнера 5. При подходе толкателя 9 к датчику 33 положения толкателя реборда первого катка 16 взаимодействует со щупом рычага 39, проворачивая весь двуплечий рычаг 39 на определенный угол, в этот момент второе плечо 40 заходит в пространство между двумя катками 16, а при освобождении ш,упа 39 от взаимодействия с первым катком 16. щуп 40 взаимодействует с ребордой второго катка 16. Таким образом, двуплечий рычаг 38 проворачивает ось 37 до тех пор, пока лепесток 41 не войдет в прорезь датчика 42. После прохождения толкателя 9, пружина 44 повернет ось 37, а с ней и двуплечий рычаг 38, в исходное положение, при котором щуп рычага 38 займет вертикальное положение. Реборда катка 16 обычного звена цепи 1, взаимодействующая со щупом рычага 39, провернет ось 37 на определенный угол, при этом лепесток 41 еще не входит в прорезь датчика 42, а так как следующий поддерживающий каток 16 находится на расстоянии 5-6 шагов цепи, то после взаимодействия со щупом рычага 39 пружина 44 вернет двуплечий рычаг 38 в исходное положение, в результате чего сигнал о положении толкателя 9 выдается независимо от поддерживаюш.их катков 16 цепи 1. Когда очередной толкатель 9 достигнет положения датчика 33, первый каток 16 провернет щуп рычага 39, а второй каток 16 - щуп рычага 40, лепесток 41 войдет в датчик 42, выдается командный сигнал С положении толкателя 9, срабатывают однооборотные исполнительные механизмы 22 остановов 2 и 4, и их пластины 18 утапливаются, упоры 24 отходят от катков 25 обоих контейнеров 4. Таким образом, оба останова 2 и 4 открыты очередным захватом 9, 1,онтейнер 3 перемещается по направляющим 26 с рабочей позиции. При достижении контейнером 3 датчика 35 закрывается останов 4, пластина 10 останова 4 и упор 24 становятся в исходное положение. Вывод контейнера с рабочей позиции закончился. Следующий захват 9 переместит контейнер 3 с предварительной позиции на рабочую позицию. При этом рама контейнера 3 нажмет на датчик 34, который выдает сигнал на закрытие останова 3, в результате чего последующий контейнер будет задержан остановом 3 на предварительной позиции. Цикл законечен. Формула изобретения 1. Устройство для останова и фиксации контейнеров, перемещаемых на катках цепью с толкателями, непрерывно движущейся по направляющим, содержащее расположенные по ходу движения цепи приводные остановы контейнеров на предварительной и рабочей позициях, взаимодействующие с толкателями, и фиксатор контейнера на рабочей позиции, отличающееся тем, что, с целью новыщения надежности работы, оно снабжено расположенными на направляющих цепи датчиком положения толкателя и управляемыми упорами по числу остановов, взаимодействующими с катками контейнеров с образованием зазора между рамами последних и остановами. 2. Устройство по П.1, отличающееся тем, что датчик положения толкателя выполнен /V -7 х В виде подпружиненного поворотного рычага, каждое плечо которого представляет собой щуп, взаимодействующий с катками толкателя. 3. Устройство по П.1, отличающееся тем. что каждый останов и упор имеют общий привод, выполненный в виде однооборотного исполнительного механизма. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 235601, кл. В 65 G 17/30, 1965. 2.Бронщтейн Э. А. и др. «Механизация работ в хлебохранилищах и экспедициях хлебозаводов, М., «Пищевая промышленность, 1973. с. 214-220.
Ю7
%2.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для останова и фиксации сушильных вагонеток | 1983 |
|
SU1153219A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ТРАКТОРОВ | 1973 |
|
SU371116A1 |
| Останов тележек подвесного грузоведущего конвейера | 1980 |
|
SU939359A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Толкатель для перемещения груза | 1986 |
|
SU1393719A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| Перегрузочное устройство | 1991 |
|
SU1792903A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Тележка подвесного грузоведущего конвейера | 1981 |
|
SU1002199A2 |
Фиг.
