Изобретение относится к промышленному транспорту, а именно к внутрицеховому транспорту, и может быть использовано в гибких автоматизированных линиях.
Известно устройство по авт. св. СССР № 1071535, в котором в качестве ориентирующего использован двуплечий рычаг, один конец которого шарнирно закреплен, а другой снабжён щупом с возможностью его за- падания в седло.
Известны перегрузочные устройства, содержащие гибкий тяговый орган с приводом и каретку, установленную на подвесном пути и связанную с тяговым органом. В крайних положениях каретки на пути уста- новлены упоры с фиксаторами и бесконтактные датчики, фиксирующие крайние положения каретки.
Известно перегрузочное устройство, содержащее установленную на раме карет- ку для груза с механизмом возвратно-поступательного перемещения, образованным смонтированным на раме приводным гибким замкнутым тяговым органом, несущим по меньшей мере два ролика, один из кото- рых установлен в вертикальном пазу, который выполнен в боковой стенке каретки.
Общим недостатком рассмотренных технических решений является недостаточная точность позиционирования перегру- зочного устройства в крайних положениях.
Целью изобретения является повышение точности позиционирования.
Достигается цель тем, что в перегрузочном устройстве, содержащем раму, каретку, перемещаемую от бесконечного тягового органа, механизм ориентации каретки выполнен в виде закрепленного на цепи водила с двумя роликами, один из которых контактирует с горизонтальной направляю- щей на раме, а другой - поочередно с вер- тикальным пазом на каретке и копиром-переключателем, поворотно закрепленным на каретке и снабженным вилкой с возможностью ее контакта с упором, жестко смонтированным на раме устройства.
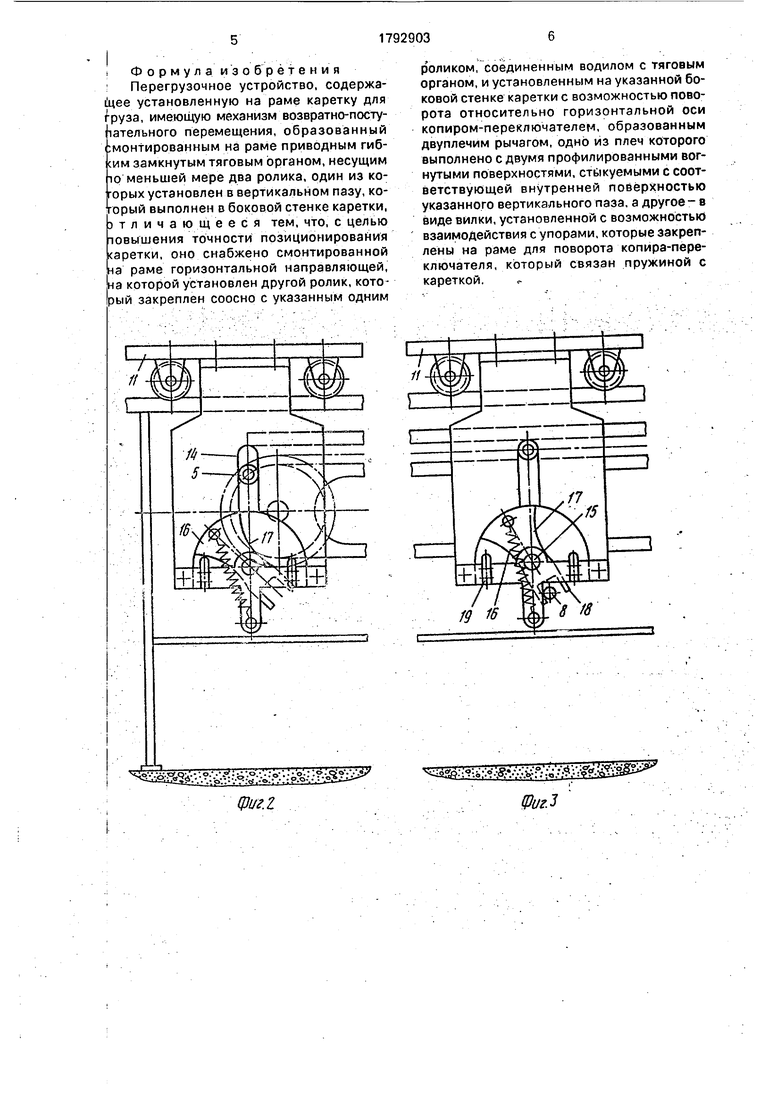
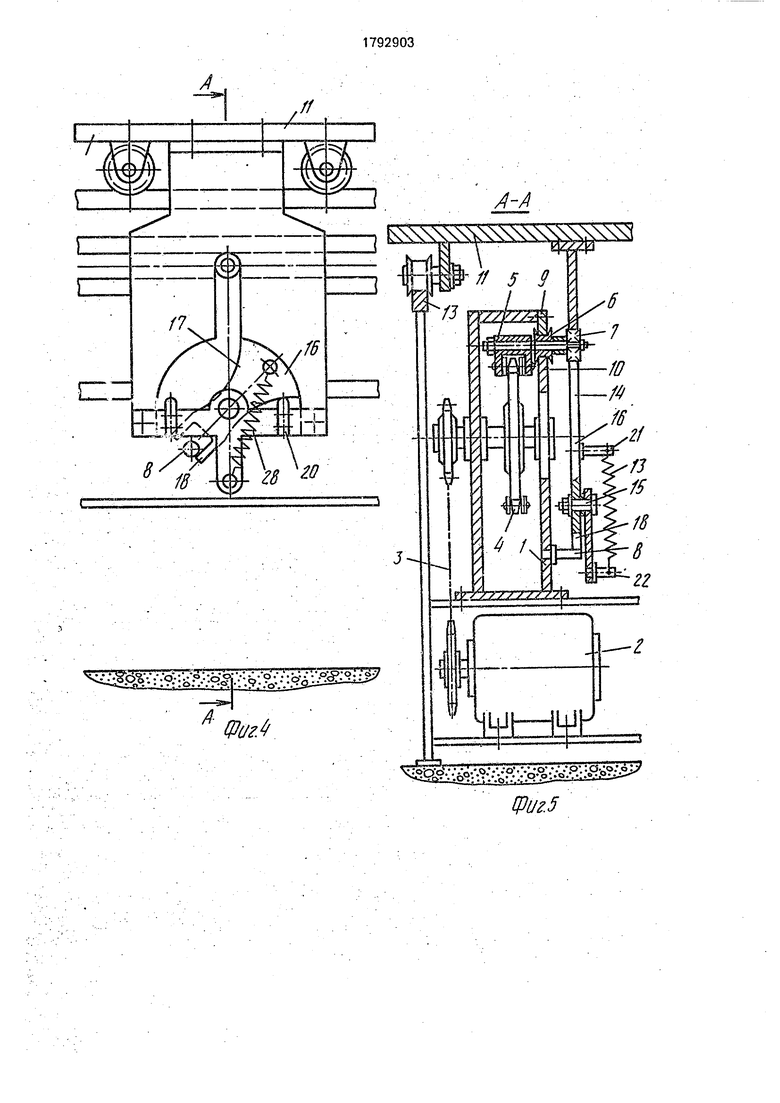
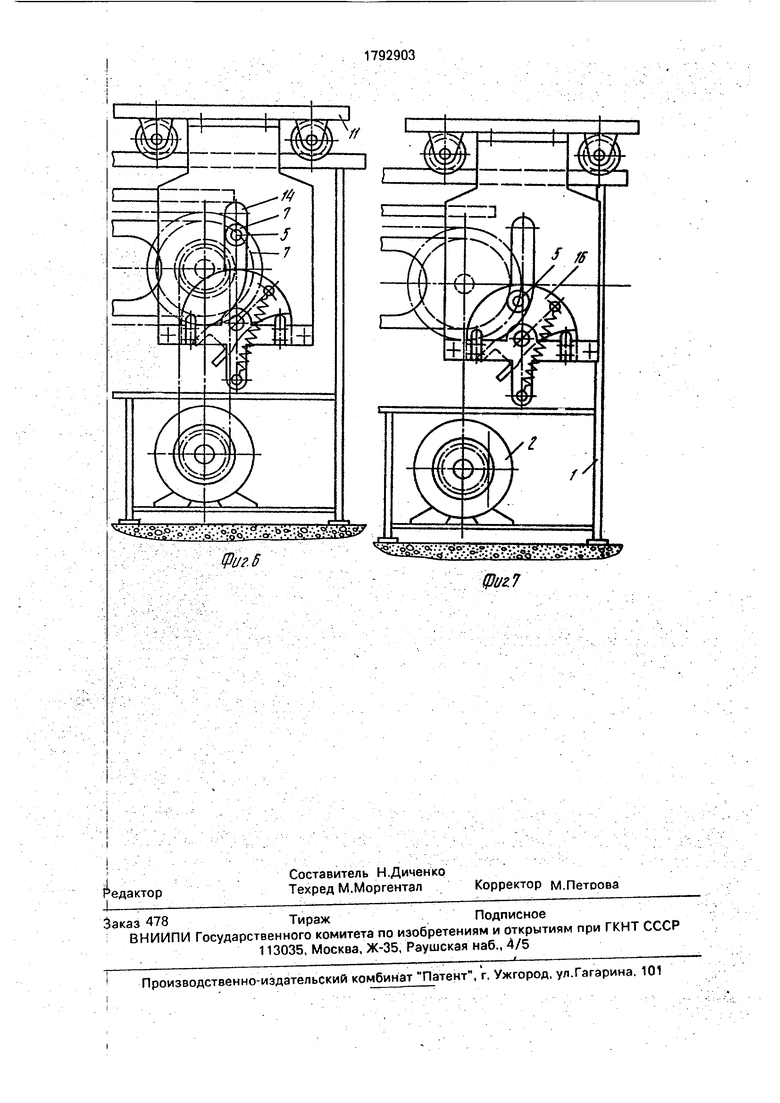
На фиг. 1 представлено устройство, крайнее левое положение: на фиг. 2 - меха- низ м ориентации в момент начала движения каретки вправо; на фиг. 3 - механизм ориентации в момент контакта с упором на раме; на фиг. 4- механизм ориентации при переходе копира-переключателя в правое положение; на фиг. 5 - сечение А-А на фиг. 4; на фиг. б - механизм ориентации в момент начала замедления движения каретки; на фиг. 7 - каретка и механизм ориентации в крайнем правом положении.
Перегрузочное устройство содержит раму 1, на которой смонтирован реверсивный привод 2, приводящий в движение через цепную передачу 3 бесконечный тяговый орган - цепь 4. На звене цепи закреплено водило 5, несущее ролики 6, 7. На раме смонтирован жестко упор 8 и направляющие 9, 10, по которым перемещается ролик 6. Каретка 11 на катках 12 перемещается по направляющим 13 и выполнена с вертикальным пазом 14 с возможностью контактирования его с роликом 7. На каретке на оси 15 закреплен копир-переключатель 16с поверхностью 17 контактирования с роликом 7. На копире 16 на общей оси 15 закреплена вилка 18, контактирующая при горизонтальном перемещении каретки с упором 8. Крайние положения копира 16 ограничены упорами 19, 20, закрепленными на каретке 11. Ось 21, закрепленная на копире 16, и ось 22, смонтированная на кьретке, соединены пружиной 23.
Перегрузочное устройство работает следующим образом.
Рассмотрим движение каретки слева направо..
При включении привода 2 через цепную передачу 3 движение передается на цепь 4.
В начальный момент ролик 7 перемещается по поверхности 17 контактирования копира 16 (фиг. 1). При дальнейшем движении ролик переходит в паз 14. и за счет тягового усилия цепи 4 каретка 11 начинает горизонтально перемещаться на катках 12 по направляющим 9, 10.
При движении вправо вилка 18 копира- переключателя 16 находит на упор 8 и копир 16 начинает разворачиваться вокруг оси 15 и сходите упора 19. Пружина 23 при этом сжимается (фиг. 3). При дальнейшем движении каретки 11 вилка 18 выходит из контакта С упором 19, копир-переключатель 16 переходит в правое положение и под действием пружины 23 ложится на упор 20 (фиг. 4).
При дальнейшем движении ролик 7, перемещаясь в пазу 14 вниз, начинает затормаживать движение каретки 11 (фиг. 6), а при вступлении ролика 7 в контакт с поверхностью 17 копира 16 каретка останавливается и по сигналу от датчика (не показан) отключается привод 2 (фиг. 7).
В момент обкатывания ролика 7 по поверхности 17 каретка стоит на месте и ее крайнее правое положение жестко зафиксировано упором 20.
Точность останова каретки обеспечена за счет жесткого фиксированного расстояния между звездочками тяговой цепи и взаимодействия ролика цепи с копиром и пазом каретки.
i Ф о р м у л а и з о бр ё т е н ия ; Перегрузочное устройство, содержащее установленную на раме каретку для груза, имеющую механизм возвратно-посту- тательного перемещения, образованный вмонтированным на раме приводным гиб- сим замкнутым тяговым органом, несущим то меньшей мере два ролика, один из которых установлен в вертикальном пазу, который выполнен в боковой стенке каретки, этличающееся тем, что, с целью повышения точности позиционирования аретки, оно снабжено смонтированной на раме горизонтальной направляющей, на которой установлен другой ролик, который закреплен соосно с указанным одним
роликом, соединенным водилом с тяговым органом, и установленным на указанной боковой стенке каретки с возможностью поворота относительно горизонтальной оси копиром-переключателем, образованным двуплечим рычагом, одно из плеч которого выполнено с двумя профилированными вогнутыми поверхностями, стыкуемыми с соответствующей внутренней поверхностью указанного вертикального паза, а другое- в виде вилки, установленной с возможностью взаимодействия с упорами, которые закреплены на раме для поворота копира-переключателя, который связан пружиной с кареткой.
ipi/г.б
§№%&(& Ъ$:$ЯЈ &
Щиг.7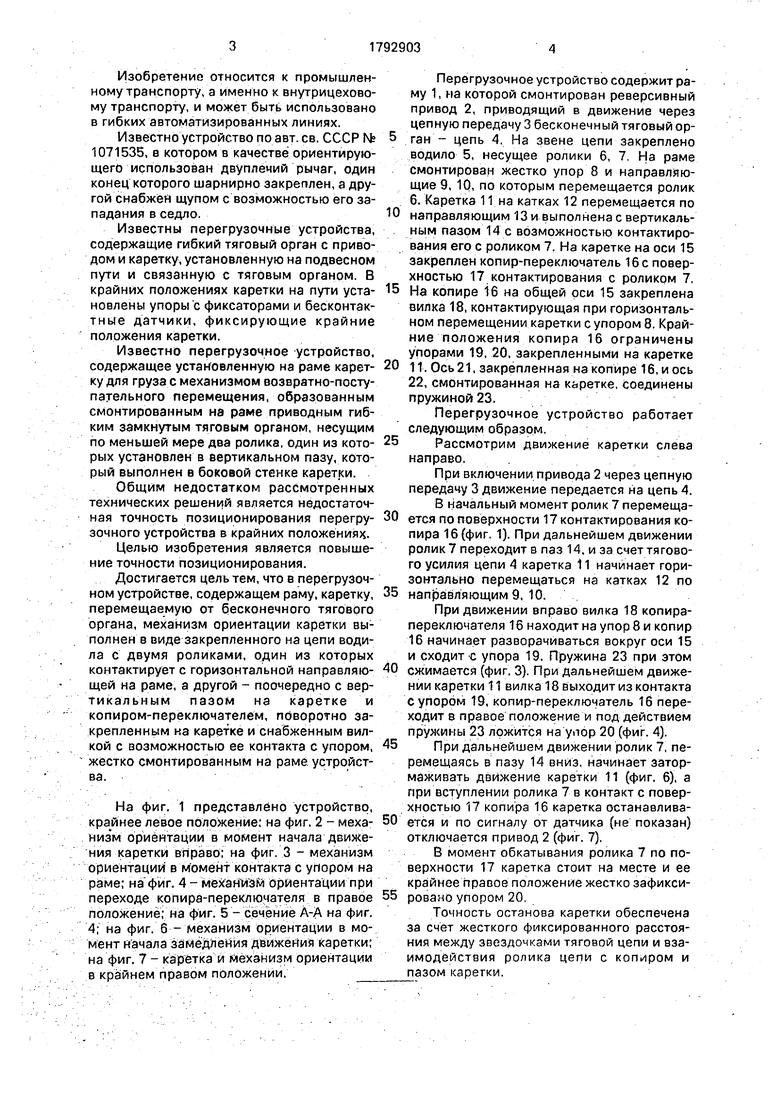
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1988 |
|
SU1654184A1 |
| Транспортно-перегрузочное устройство | 1991 |
|
SU1754586A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Скороморозильный аппарат для упакованных пищевых продуктов на поддонах | 1985 |
|
SU1330427A1 |
Использование: в промышленном транспорте, в частности для внутрицеховых пе эевозок, например в гибких автоматизи- Р05анных линиях и складах. Перегрузочное устройство содержит установленную на ра- ме| 1 каретку 11 с катками 12 и механизмом перемещения, образованным цепью 4, связанной с приводом 2. Механизм ориентации каретки образован закрепленным на цепи 4 водилом 5 с двумя роками б и 7, один из которых контактирует с горизонтальной направляющей на раме, а другой - поочередно с вертикальным пазом 14 на каретке и копиром-переключателем 16, закрепленным поворотно на каретке. При этом копир снабжен вилкой 18, контактирующей с упором 8 на раме. В начальный момент ролик 7 перемещается по копиру 16 и переходит в паз 14 до его верхней точки, после чего каретка начинает перемещаться в крайнее правое положение. В процессе движений вилка 18, контактируя с роликом 8, поворачивает копир-переключатель относительно оси 15 в крайнее правое положение. .При дальнейшем движении ролик 7, перемещаясь в пазу 14 вниз, затормаживает движение 3 каретки, а при переходе ролика на копир 16 тележка останавливается. 7 ил.(/) -. -. . ,. .С
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
