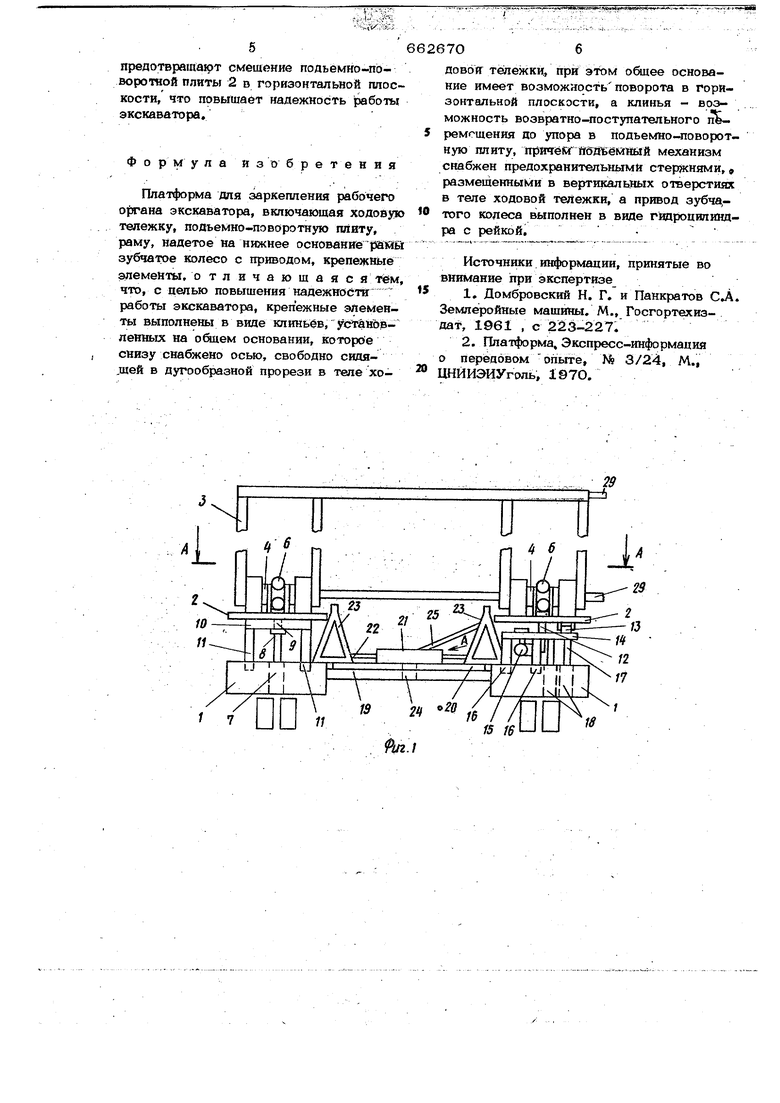
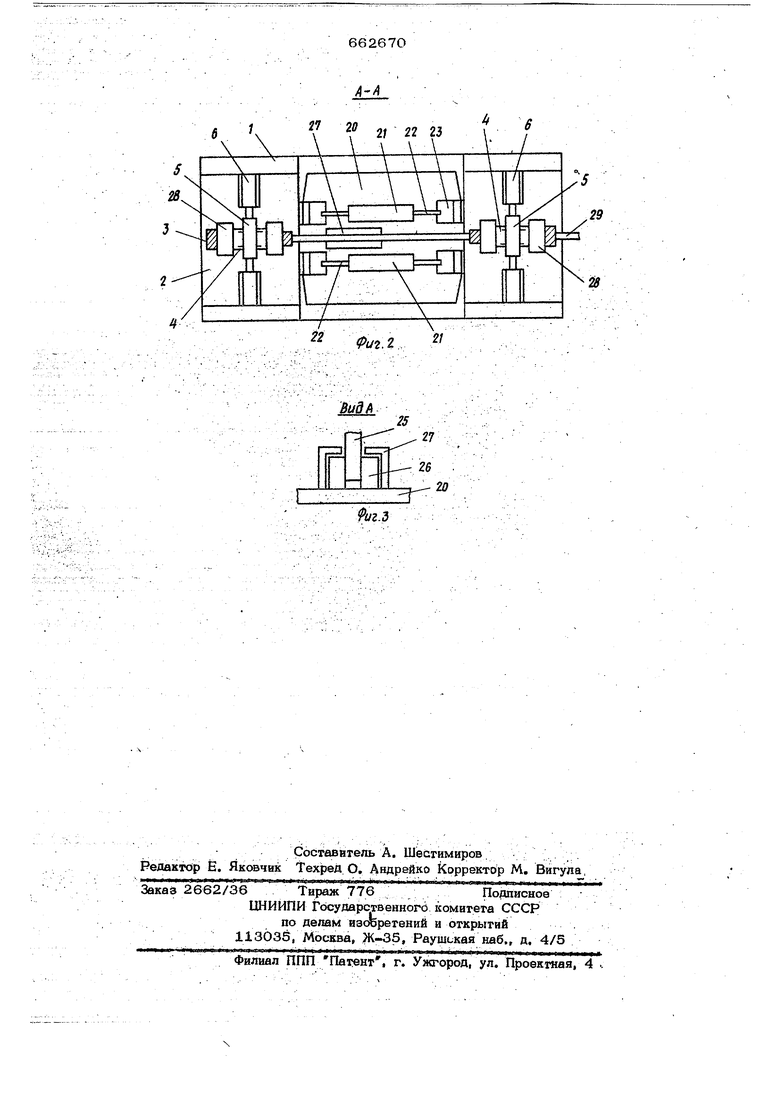
(54) ПЛАТФОРМА полненный в виде рейки 5, прикрепленной к штоку сипового гидроцилиндра 6. Гидро цйпйндр жестко прикреплен к подъемноповоротной плите. Одна часть подъе- но-пбворотной плиты снабжена снизу подъемным гидроцилиндром 7, шток 8 которого свободно контактирует с полу. осью 9. Полуось жестко прикреплена снизу к подъемно-поворотной плите. Шток подъёмного гидроципиндра и полуос 9 соосйо расПопожёны в теле перекладины 10, к к:онцам которой жестко при- . креплены предохранительные стержни 11 штока. Предохрайительные стержни размещены в вертикальных отверстиях в теле ходовой тележки. Другая часть подьем но-повЪротной плиты снабжена снизу вер Т)шсальнь1м водкаом 12 и катком 13, который свободно устапо.влен на дуге 14, Вертикальное водило шарнирно соединено 7 со штокомповоротного гидроцкпиндра 15 который с возможностью поворота в горизонтальной плоскости прикреплен к дуг к которой жестко прйкрегшёШ прёдЬхрайй тельные стержни 16 штоков 17 подъемных гидроцилиндров 18, На плите 19 ходовой тележки свободно расположена HpyraF плита 20, на которой жёстко за креплены двухходовые гидроципимдры 21, к штокам 22 которых прикреплены клинья 23, Плита 20 снизу снабжена 8сШ 24,которая свободно сидит в Дугообразной прор1ези в теле плиты 19. К внутрен ,ней граниподъемно-поворотной плить 2 шарнйрйо прикреплено наклонное водило 25,нижНий конец которого cHa6}f(eHkaiT. ками 26. Катки 26 с боков и сверху ограничены угольниками 27, koTopibie жестко прикреплены к плите 20. Рама 3 к подъемно-поворотной плите2 крепится . посредством корпусов подшипников 28, К еерзснёму и Ни5йНему бснбванМм рамы 3 посредством стержней 29 крепится рабочий орган экскаватора,- :. : Платформа работает следующим обра зом. J. ., : - ,-;..-;,--.,/. Когда подъемно-поворотная плита 2 установлена на максимальной высоте и застопорена Клиньями 23, рабочий орган . экскаватора находится в вертикальном положений в плоскости рамы 3. Приведение рабочего органа экскаватора в накйойнЬ положение в соотеётствии с наклоном разрабатыва:ем010 nrtacta прОйз. ВОДИТСЯ одновременным включением гйдроцкпиндров 6,7,15,18,21. В результате включения двyxxoдoвj)Ix РйДрЬцилйтцррбв 21 клинья 23 начинают стягиваться к центру платформы, скользя по плите 20, В результате включения силовых гидрчи.цилиндров брама 3 через зубчатое колеер 4 начинае наклоняться относитель- но своего нижнего основания в вертикальной плоскости. В вертикальной плоскости начинает наклоняться и рабочий орган экскаватора, . В результате ветючения подъемных гидроцилиндррв 7 и 18 рама 3, а вместе с ней и рабочий орган экскаватора, начинает опускаться вниз, из-за чего нижний конец рабочего. органа перемешается вдоль забоя, не отрываясь от его поч-/ вы. При этом опускание рамы 3 вниз происходит так, что боковое ребро подъемно-поворотной плиты 2, не отрываясь, скользит по наклонной поверхности клиньев 23. Вместе со штоками 6 и 17 вниз опускаются и предохранительные стерж- . ни 11 и 16 вдоЛьлвертикальных отверстий в теле ходовой тележки 1. В результате включения поворотного ги:ароци,пйндра 15 происходит перемещениё вертикального водила12 в гориэон- , тальной плоскости, что вызывает прокатьшанйе катка 13 по ,дуге 14, Рама 3 ЬЙйбврё еннр наклоняется & вертикальной пЛЬдкостй, Опускается вниз и поворачивйется в горйзрнтальнрй плоскости. Эти же движения повторяет и рабочий орган экскаватора,: . ,. Одноврёйённо с рамой 3 в горизонтаЛьной плоскости поворачивается и плита 20, ось 24 которой перемешается в дугообр азНой прорези В теле Плиты 19, Поворот тшиты 2,0 в горизонтальной плоскости происходит благодаря наклонному BOflimy 25, шарнирно прикрепленному к внутрёййёй грани подъемйо-поворот-; ной плиты 2, которое вместе с ней по- ворачивается в горйзонтальйой плоскости и одновременно опускается ВНИЗ, скользя катками 26 по плите 20. При этом поворот наклонного водила 25 в горизонтальной плоскости передается плите 20 благодаря угольникам 27, жёстко прикрепленным к ней. Когда рабочий оргай экскаватора достигает требуемого наклона в вертикальной и горизрйтальной плоскостях, гийрЬцкпиндры. 6, 7, 15, 18, 21 одновременнр отключаются и стопорятся. Рабочий орган экскаватора, прикреплённый к платформе посредством стержней 29, готов к работу. При этом клинья 23 и предохранительные стержни 11 и 16 npeflOTBpainaipT смешение подьёмно-поворотной плиты 2 в горизонтальной плоскости, что повышает надежность {заботы экскаватора. Формула изобретения Платформа для заркепления рабочего органа экскаватора, включающая ходовую тележку, подъемно-поворотную плиту, раму, надетое на нижнее основание pasib зубчатое колесо с приводом, крепежные элементы, отличающаяся тем что, с целью повышения надежности работы экскаватора, крепежные элементы выполнены в виде клиньев, у стйновленных на о&цем основании, которое снизу снабжено осью, свободно скдя,щей в дугообразной прорези в теле хо706довЫйГ тележки, при этом общее основание имеет возможность поворота в горизонтальной плоскости, а клинья - возможность возвратно-поступательного перемещения до упора в подьемно- оворотную плиту, причёк ШДЁ.ёмвый механизм снабжен предохранительными стержнями,« размещенными в вертикальных отверстиях в теле ходовой тележки, а привод зубчатого колеса выполнен в виде гкароцилшщра с рейкой, Источники информации, принятые во внимание при экспертизе 1,Домбровский Н, Г, и Панкратов С,А. Землеройные машины. М., Госгортехиздат, 1961 , с 223-227. 2.Платформа, Экспресс-информация о передовом опыте, № 3/24, М., ЦНЙИЭИУголь, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор | 1974 |
|
SU825773A1 |
| Камнерезная машина | 1981 |
|
SU1134718A1 |
| Рабочее оборудование гидравлического экскаватора | 2019 |
|
RU2720039C1 |
| Экскаватор | 1980 |
|
SU876885A1 |
| Роторный экскаватор | 1983 |
|
SU1263756A1 |
| Перегружатель материалов для укрепления откосов каналов | 1980 |
|
SU887690A1 |
| Породоразрушающая машина | 1982 |
|
SU1082911A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| УСТРОЙСТВО ДЛЯ СНОСА СООРУЖЕНИЙ | 2009 |
|
RU2483181C2 |
| Кран-манипулятор | 1987 |
|
SU1481194A2 |
LJ
Л
т
7
7 л lij
/:
17
/ / iviiXi
I ,i 77
Л W
IS 16
27
Ч
Вид
liA2 21 22 23
-
28
Фи2.2
25
