(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Следящая система | 1984 |
|
SU1211690A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Следящая система | 1983 |
|
SU1120280A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
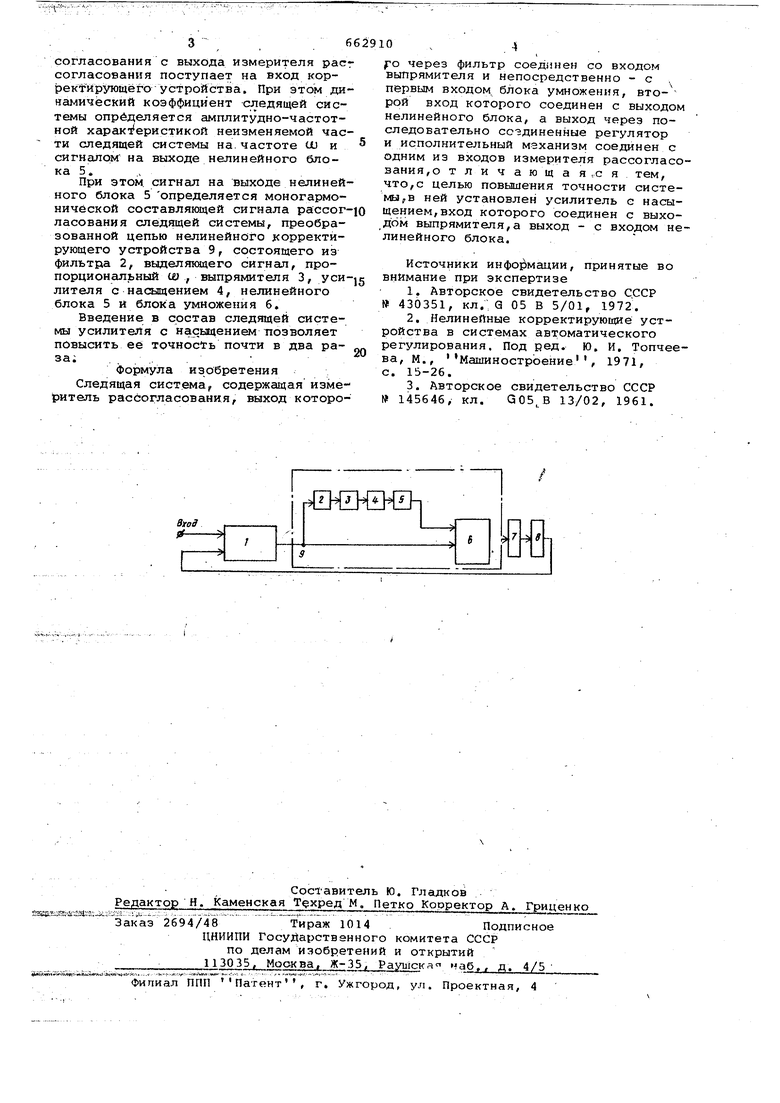
Изобретение относится к следящим системам автоматического регулиройания и может быть использовано для управления моделирующими стендами. Известны, следящие системы, содержа1чие сумматор, усилитель-ограничитель, выпрямитель, фильтр, дифферен-. циатор, блок с переменным коэффициентом усиления, регулятор и исполнитель ный механизм 1 и 2, Наиболее бЛизкой по функционбшьному назначениюк данному изобретению является следящая система, содержащая измеритель рассогласования, выход которого через фильтр соединен со входом выпрямителя и непосредственно.с Первым входом блока умножения второй вход которого сдединен с выходом нелинейного блока, а выход через последовательно соедйненйые регулятор и исполнительный механизм соединен с одним из входов измерителя рассогласо вания 3 , Недостатком такой cиcтe / Ы является ее невысокая точность. Целью изобретения является повышение точности следящей системы. .Поставленная цель достигается тем, что в предлагаемой системе установлен усилитель с насыщением, вход которого соединен с выходом выпрямителя, а выход - со входом нелинейного блока. На чертеже показана блок-схема предлагаемой следящей системы, содержащая измеЁ5ительрассогласования 1, фильтр 2, выпрямитель 3, усилитель с насыщением 4, нелинейный блок 5, блок умножения 6, регулятор 7, исполнительный механизм 8, нелинейное корректирующее устройство 9. Следящая система работает следующим образом. При входном сигнале системы, равном нулю, коэффициент усиления следящей системы определяется амплитудночастотной характеристикой неизменяемой части следящей системы, состоящей из регулятора 7 и исполнительного механизма 8, на нулевой частоте и значением сигналана выходе не.пинейного блока 5. При этом на входе фильтра 2, который может быть дифференцирующ1 м фильтром, и на первом в,ходе блока умножения 6 сигнал равен его значению на нулевой частоте. В том случае, когда на вхот следящей системы подают сигна.п в виде изменяющегося по гармоническому закону напряжения с частотой UJ , сигнал рассогласования с выхода измерителя рас согласования поступает на вход корректйрующёго устройства. При этом ди намический коэффициент следящей системы определяется амплитудно-частотной характ еристикой неизменяемой час ти следящей системы на. частоте О) и сигналом на выходе нелинейного блока 5. При этом, сигнал на выходе нелиней ного блока 5 определяется моногармоничёской составляющей сигнала рассог ласования следящей системы, преобразованной цепью нелинейного корректирующего устройства 9, состоящего из фильтра 2, выделяквдего сигнал, пропорциональный Ш , выпрямителя 3, уси лителя с насыщением 4, нелинейного блока 5 И блока умножения 6. Введение в состав следящей системы усилителя с насыщением позволяет повысить ее точнос ь почти в два раза; . . Формула изобретения Следящая система, содержащая изме ритель рассогласования, выход которо fo через фильтр соединен со входом выпрямителя и непосредственно - с первым входом блока умножения, второй вход которого соединен с выходом нелинейного блока, а выход через последовательно соединенные регулятор и исполнительный мзханизм соединен с одним из входов измерителя рассогласования,о т л и ч а ю щ а я ,с я тем, что,с целью повышения точности системы, в ней установлен усилитель с насыщением, вход которого соединен с выходом выпрямителя,а выход - с входом нелинейного блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство QCCP 430351, кл.:а 05 В 5/01, 1972. 2.Нелинейные корректирующие устройства в системах автоматического регулирования. Под ред. Ю. И. Топчеева, М., Машиностроение, 1971, с. 15-26. 3.Авторское свидетельство СССР № 145646, кл. 13/02, 1961.
