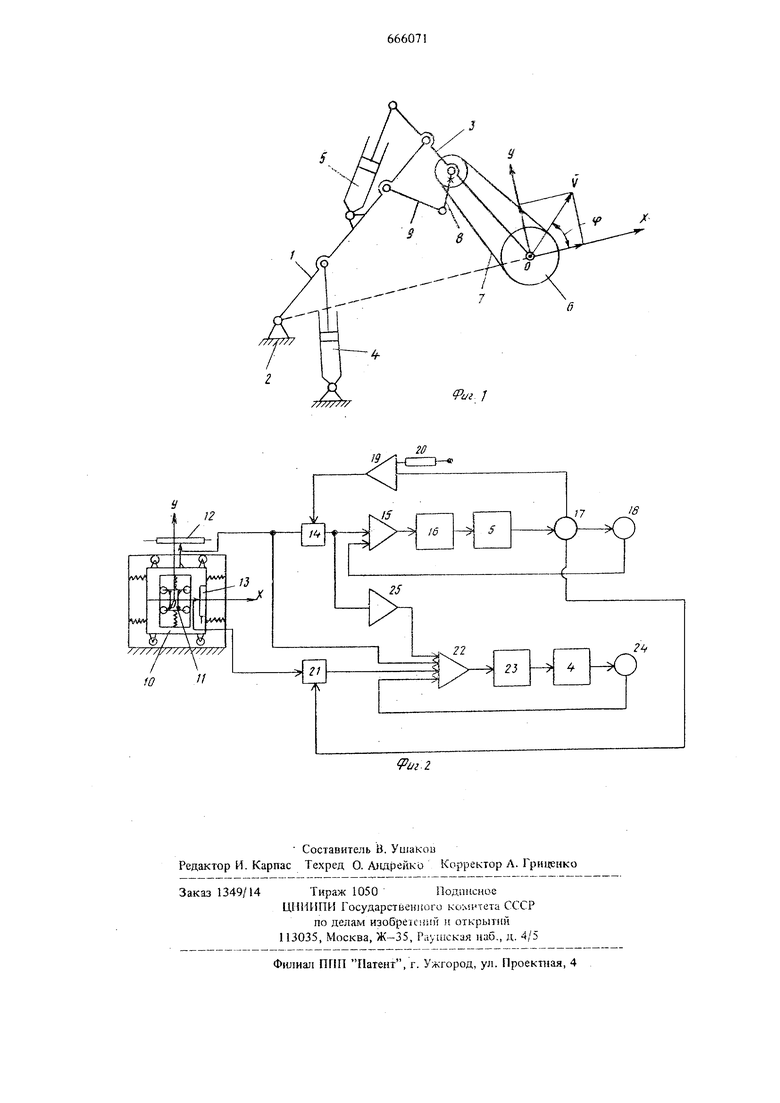
I Изобретение относится к манипуляторам и мо жет быть использовано шя механизации погрузочно-разгрузошых работ. . Известен манипулятор, содержащий исполлительный механизм в виде шарнирио соедияен-пых звельев со следящими приводами, управляющийS механизм с датчиками, кинемат№ ески связаинь ми с исполнительным механизмом, и систему управления 1. Недостатком известного устройства является то, что точность выполнения рабочих операций существенно зависит от скорости перемещения звеньев. Целью настоящего изобретения является устранение указанного недостатка. Цель достигается благодаря тому, что мштипулятор снабжен дополнительным синусно-косинусным датчиком, а система управления -- блоками перемножения, включенными между управляющим механизмом и блоками упраплеЕпш прнводами звеньев, и соединена с указанным вьяиг дат- чиком. Кроме того, кт емат1тческая цепь управляющего и исполнительного механизмов содср к5 Т последовательно соедине1тые ередаточн 1Й меха(54) МЛиИПУЛ ЯГОР 2 пизм с исрсдаточпьим Ч)Ъ:ло .. равным 0.5, и ;iny звепиик, гсамстрическ шмюбньп 1 спплнитольпому механизму . H;i фиг. 1 noKa:jjii .b-iioiiHi;ic:ii. uiiiiiii мзи.ииуляго(1а; кп . 2 бЛм:-с-:ел1:1 .litю; li.i vii,jv;aле1 ия. М,1 ип;у;;я10; (. П -o.-hчт i; icpiuMo ijcна 1, liiapinipiio, усаноБ.юиио на яслои-анш 2, и второго звсн, 3, iiO :;inpi-n coiiiincsiiiuro со знеиом I. )}1и-;.;)л jBCiia ; --.сзичук rc;i niiju)ци:1иидром 4, а згзсиа Я i iip(:iui.,j-riM 5. На кошс зисна 3 усктонлои ;н Л1сльпь1Й cnHyciio-KociiuycHiiif лутч-.гк 6. кллс.пиичосси СР.Язащачй с Етолкпцьш псггслгги.члглс г-Слапизмп 7 рыч-. i ,- -, и , , i ч i .i,v 9 и - i i i 1ч, i ч , ишма 7 yijijii. J... d i i i s i, i дш , ,i i , ч . l ni, и и ы i ч i i ; и i lu in р i i i
нения к звеньям 1 и 3 до оси шарнирного соединения этих звеньев. Соблюдение этих условий обеспещшает постоянную ориентацию дополнителького датчика 6 относительно, линии, соединяющей оси шарнирного присоединения звеньев 1 и 3.
На фиг. 2 представлена блок-схема системы управления приводами звеньев. Управляющий механизм 10 имеет систему координат ХОУ и крегштся SC дополнительному рычагу 6 таким обра.зом, что ось ОХ совпадает с продолжением указапной выше линии. Управляющий механизм 10 имеет рукоятку 11 управления, кинематически связанную с датчиками 12 и 13, один из которых параллелен оси ОХ, а другой - оси ОУ.
Сигнал датчика 12 поступает последовательно на блок 14 перемножения, усилитель 15, на злектрогидравлический преобразователь 16, который управляет гидроцилиндром S. Гидроцилиндр 5 производит поворот звена 3 относительно звена 1 (фиг, 1), на оси которого установлены вращающийся трансформатор 17 и тахогенератор 18, причем сигнал с последнего поступает на вход ус шителя 15 и обеспечивает тем самым обратную связь по скорости.
Вращающийся трансформатор 17 через усштитель 19 соединен с блоками 14 перемножения. Через сопротивление 20 на вход усилителя 19 подается постоянное напряжение U. Сигнал с датчика 13 поступает последовательно на блок 21 перемножения, усилитель 22 и злектрогидравлический преобразователь 23, который управляет гидроцилиндром 4, осуществляющим поворот звена 1 относительно основания 2.
Тахогенератор 24, уста} овленный на оси соединения звеньев 1 и 3, соединен с усилителем 22 и обеспечивает обратную связь по скорости. Кроме того, па вход усилителя 22 поступают сигналы с датчика 12 и через ус5шитель 25 с выхода блока 14 умножения. Враща}ощийся трансформатор 17 (Роединен с блоком 21 перемножения.
Работа манипулятора осзществляется следую цим образом. При смещении р тсоятки 11 управдоения из нейтрального положения с датчика 12 в систему управления поступает сигнал Vcosi, а с датчика 13 - сигнал Vsini, где f - угол меж ду осью ох и векторо.м V смещения рукоятки из нейтрального положения.
Сигнал Vcosi J перем 1ожается с сигналом, (и + а. сс5ф), снятым с вращающегося трапо форматора 17, и через усилитель 15 поступает на злектрогидравлический преобразователь 16. Таким образом управляющий сигнал для звена 3 имеет вид:
VcOSlpCU - OjCOSj)
Сигнал ajsiny, снятый с вращающегося трансформатора 17, подается на блок 21 перемножения где он перемножается с сигналом Vsin, а на усилителе 22 суммируется с сигналом Vcosv и с сигналомУ со5Ц(и +aj, cos у ) . Тогда отногиение сигнала привода к управляюп1ему сигналу привода звена 3 будет иметь вид;
dg V со5ф-а з лсоьф(и+а jCoS|)+-Vuin ф Oj &1П у со фСи+а соь)
QS. - Од 6iny
и+ Oj COSJ- о §Р U- OgCOS
в то же время для заданного вектора скорости V в системе координат ХОУ отношение угловых скоростей зпепьев i-.и 3
JO,
.-0.541 (l-n)-cots
(jj
, (i-n )- JnT .
Jii:±a.
n
где
-постоянные коэффищ1е 1ть,
«о.а2,«з««5
- соответственно дЛ1шы звеньев 1 и 3,
-угол поворота трансфортматора 17.
Формула изобретения
1.Манипулятор, содержащий исполнительный механизм в ввде щарнирно соединенных звеньев со следящими приводами и управляющий механизм с датчиками, кинематически связшшый с исполнительным механизмом, и систему управлешш, отличающийся тем, что, с целью повышения TotQJocTH выполнения рабочих операщ1Й, он снабжен дополнительным синусно-косинусным датчиком, а система управления - блоками перемнонсения, включенными между управляющим механизмом и блоками управления приводами звеньев, и соединена с указшшым датчиком.
2.Манипулятор по п. 1, отличающийся тем, что К1гаематическая цепь управляющего и исполнительного механизмов Содержит последовательно соединенные передаточнь Й механизм с передаточным числом, равным 0,5, и двухзвенник, геометрически подобный исполнительному механизму.
Источники информации, принятые во внимани 1ФИ зкспертизе
1. Авторское свидетельство СССР № 602366, кл. В 25 I 9/00, 1977.
Ui. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления погрузочным манипулятором | 1983 |
|
SU1446598A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| Устройство для управления исполнительным механизмом манипулятора | 1983 |
|
SU1282077A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
22
