(54) КОМАНДОАППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для мерной резки движущегося профиля | 1987 |
|
SU1518089A1 |
| Командоаппарат | 1975 |
|
SU523404A1 |
| Устройство для передачи вагонеток с одного магистрального рельсового пути на другой, параллельный первому | 1971 |
|
SU563341A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Устройство для навивки пружин | 1982 |
|
SU1087237A1 |
| Устройство контроля состояния контактных вставок токоприемников | 1988 |
|
SU1602773A1 |
| Автооператор | 1982 |
|
SU1033288A1 |
| Механизм смыкания форм литьевой машины | 1984 |
|
SU1268431A1 |
| Устройство для дештабелирования и разгрузки тары | 1985 |
|
SU1318498A1 |
| Командоаппарат | 1988 |
|
SU1564605A1 |
Изобретение относится к системе уп- равпевия приводами с целью переключения или автоматической точной остановки подвижного механизма относительно фиксированной точки на неподвижном основании путем ввода управляемой пластины в паз бесконтактного выключателя.
Оно может быть применено на машина с электрическим или пневматическим приводом, требующим точной автоматической остановки илн переключения элементов, движущихся по рельсам, подвесным путям, т.е. по направляющим допускаюшим значительный пюфгг к качку..
Известен командоаппарат Ij, содержащий неподвижное основание, на котором жестко закреплены путевой выключатель и защитная пластина. На подвижном основании жестко закреплены два кронштейна, однн из которых снабжен пружиной. Последняя отжимает, шарнирно закрепленную пластину с упором в сторону неподвижного основания с концевым выключателем. Упор закреплен в средней части пластины в виде тела вращения.
Однако надежная работа такого устройства обеспечена только при применении контактного выключателя.
Наиболее близким техническим решением к изобретению является командогаппарат 2, содержащий установленное на направляющих подвижное основание с поводком, неподвижное основание с закрепленным на кронштейне путевым выключателем с прорезью и проходной механизм ттереключения в виде пластины и бесконтактного выключателя.
Пластина может быть жестко закреплена на грузозахвате, а бесконтактный выключатель - на направляющих путях. При движении пластина входит в паз бесконтактного выключателя и производит переключение скорости перемещения или остановку механизма в зависимости от схемы.
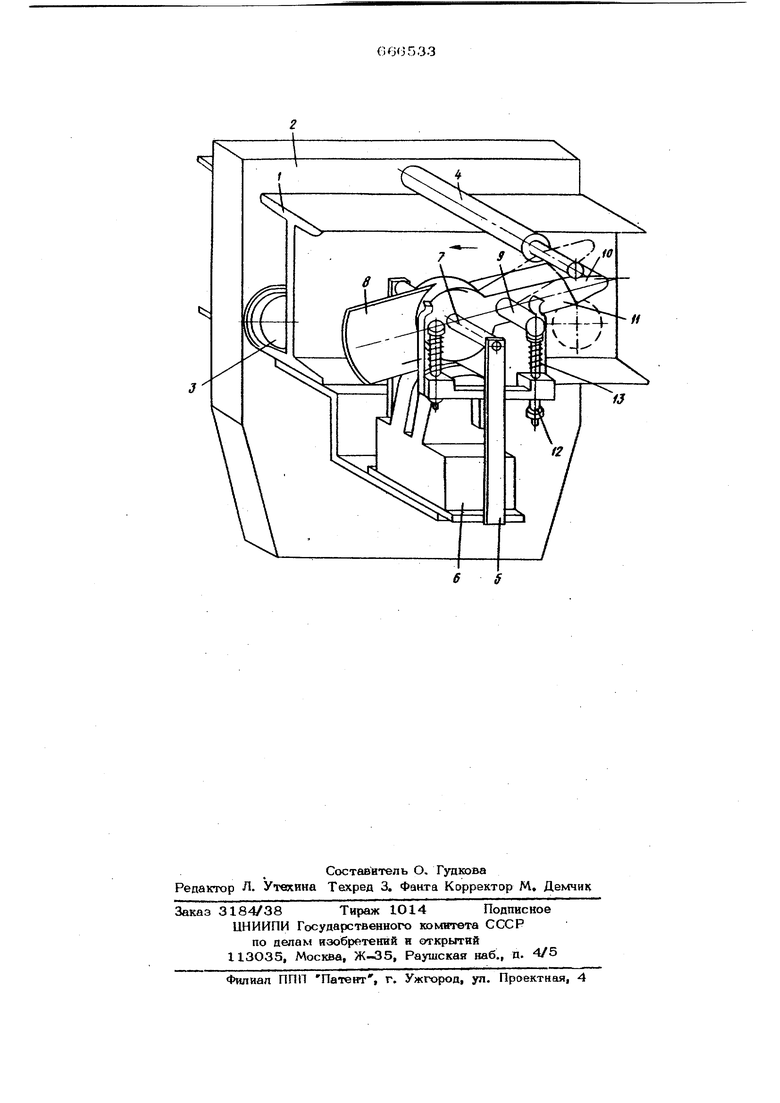
Недостатком этого кюханизма является то, что в процессе вксплуатации образуются люфты, вызванные раскачкой груза, при изменении скорости ого движения, а также люфты в ходовой части механизма, которые приводят к несоосности паза выключателя относительно пластины.. Кроме того, пластина при обслуживании может быть изогнута или ослаблена, в резулнгате чего создается аварийная ситуация из-за отсутствия сигнала в электросхеме. Целью изобретения является повышение надежности работы командоаппарата. Эта цель достигается тем, что предложенный командоаппарат содержит рычаг первого рода, ось которого закреплена в кронштейне неподвижного оснсла- кия, а ось поводка подвижного основания перпендикулярна плоскости качания рычага первого рода, параллельной плоскости прорези путевого выключателя. Кроме того, на кронштейне по обе стор ны оси рычага первого рода установлены упоры с защепками, а на одном плече ВТОГО рычага - палец, ось которого перпендикулярна плоскости упоров, а на дру гом плече - противовес. На. чертеже показан командоаппарат, общий вид. На направляющих 1 с возможностыо возвратноЛостуттатепьного перемещения установлено подвижное основание - грузозахват 2 на ходовых колесах 3. На груэоаахвате 2 жестко закреплен поводок 4. На напраоляющих 1 закреплено неподвижное основание -. кронштейн 5, в котором установлены бесконтактный пут© вой выключатель 6 на оси 7 - двуплечий поворотный рычаг 8 первого рода с паль нем О в противовесом 10 на его рабоче плече 11. Угол отклоневйя рычага 8 ограничен упором 12 с пружиной 13 и зазцелквй 14, установленными на опорном кронштейне 5. На чертеже сплршвымв линиями устро ство изображено в положении, по воаок 4 контактирует с рычагом 8. При перемещении грузозахвата 2 влево или вправо по направлякшгам 1 по водок 4 поворачивает рычаг 8 на OCR 7 до вертикального положения. При втом одно из плеч рычага 8 входит в паз вы ключателя 6, закреплениого на кронште не 5, и производив переключение скоро- сти перемещения или сх;тановку автооператора в зависимости от схемы. При дальнейшем перемешении грузозахвата 2 в том же направлении плечо II рычага 8 отклоняется, и палец 9 доходит до упора 12, подпружиненного пружиной 13, и фиксируется зашелкой 14. Противовес 10 необходим в работе только в момент остановки автооператора на конечных позициях. Благодаря установке проходного переключателя и двуплечего рычага на один неподвижный опорный кронштейн достигается постоянная соосность одного из плеч рычага с пазом переключателя. В результате обеспечивается надежная работа механизма и аварийная ситуация исключается. Формула изобретения Командоаппарат, содержащий установленное на направляющих подвижное основание с поводком, неподвижное основание с закрепленным на кроюитейне путевым выключателем с прорезью, о т л и ч а ющ И и с я тем, что, с целью повышения надежности командоаппарата, он содержит рычаг первого рода, ось которого закреплена в кронштейне неподвижного основания, а ось поводка подвижного освовашя перпендикулярна плоскости качания рычага первого рода, параллельной плоскости прорези путевого выключателя. 2.Комавдоаппарат по п. 1, о т л ичаюшийся тем, что на кронштейне по обе стороны оси рычага первого рода установлены упоры с защелками, а на одном плече этого рычага - палец, ось которого перпендикулярна плоскости упоров. 3.Командоаппарат по п. 1, о т - личающийся тем, что на другом плече рычага первого рода установлен противовес. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 523404, кл. О 05 & 21/ОО, 1975. 2.Спр. Элементы механизмов . Под ред. С . Н. Кожевникова. М., Гос. изд, оборонной промышленности, 195О, С.67О, рис. 2365.
