(54) ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1090528A1 |
| Загрузочное устройство | 1977 |
|
SU677867A1 |
| Автооператор | 1979 |
|
SU831514A1 |
| Устройство для подачи и удаления заготовок | 1976 |
|
SU564946A1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2138368C1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО К МЕТАЛЛррЕ>&КУЩ}1]У1 СТАНКАМ | 1970 |
|
SU284573A1 |
| Загрузочно-разгрузочное устройство | 1979 |
|
SU841912A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1247230A1 |
| Устройство для загрузки заготовок в патрон металлорежущего станка | 1987 |
|
SU1505749A1 |
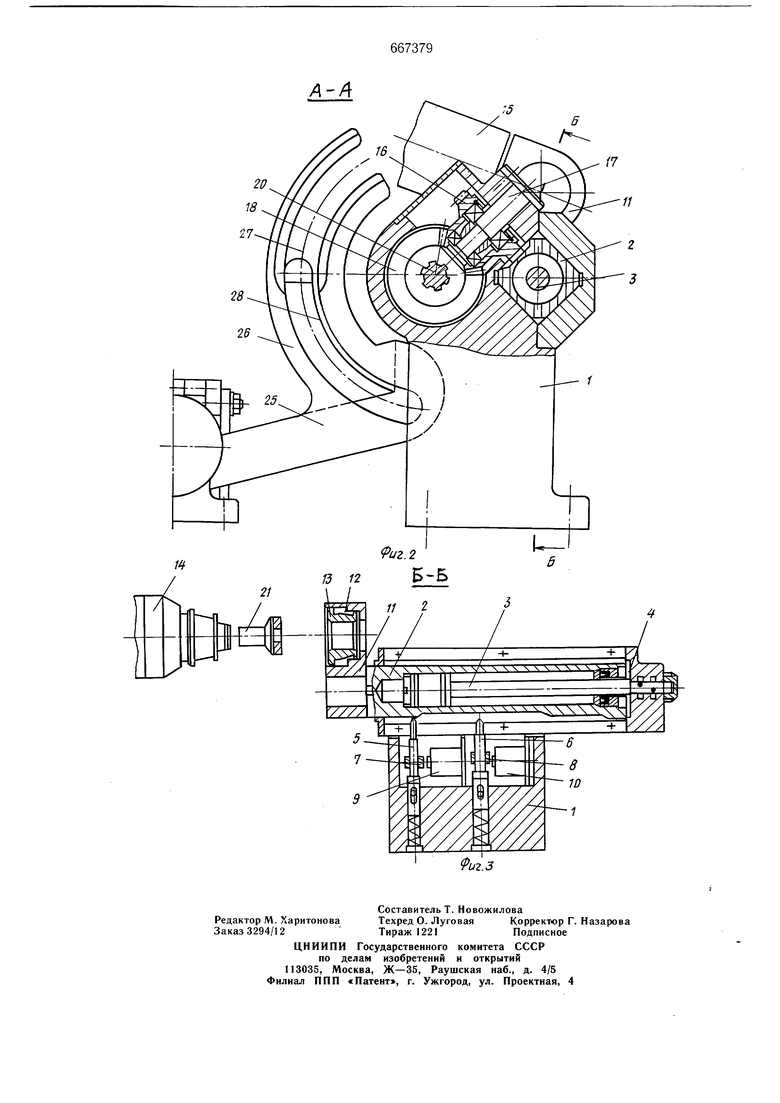
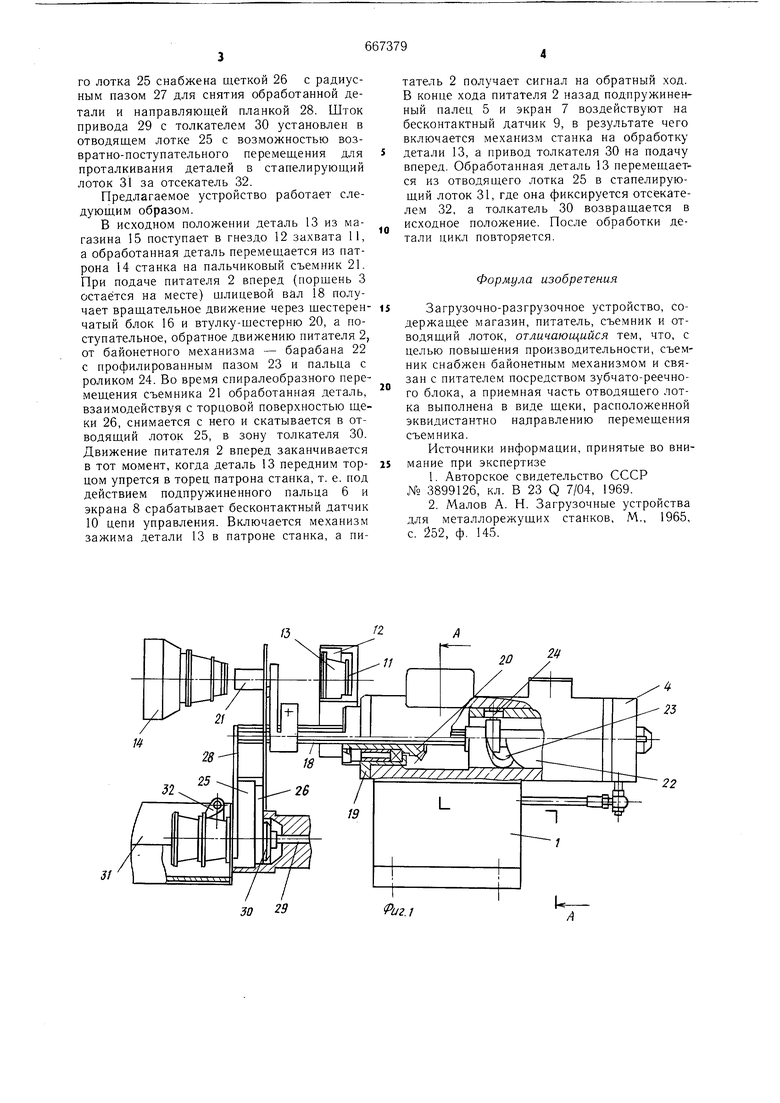
Изобретение относится к области машиностроения и может быть использовано при загрузке станков и автоматических линий. Известен автооператор для передачи штучных изделий, содержаший питатель, установленный с возможностью поворота и возвратно-поступательного перемещения, съемник и общий привод в виде гидроцилиндра 1. Известно также загрузочно-разгрузочное устройство, содержащее магазин, питатель, съемник и подводящий лоток 2. Недостатком этих устройств является значительное дополнительное время, затрачиваемое на холостые ходы, что снижает их производительность. Целью изобретения является повышение производительности. Цель достигается тем, что съемник снабжен байонетным механизмом и связан с питателем посредством зубчато-реечного блока, а приемная часть отводящего лотка выполнена в виде щеки, расположенной эквидистантно направлению перемещения съемника. На фиг. 1 - предлагаемое устройство, общий вид; на фиг. 2 - то же, разрез по А-А на фиг. I; на фиг. 3 - то же, разрез по Б-Б на фиг. 2. Устройство состоит из корпуса 1, питателя 2 в виде скалки-рейки и порщня 3, укрепленного посредством крышки 4 на корпусе 1. Профилированное ребро питателя 2 через подпружиненные пальцы 5 и 6 с экранами 7 и 8 взаимодействует с бесконтактными датчиками 9 и 10 цепи управления. Питатель 2 снабжен захватом 11 с гнездом 12 для подачи детали 13 в патрон 14 станка, причем гнездо 12 выполнено раскрытым со стороны магазина 15. Шестеренчатый блок 16, закрепленный на пальцевой опоре 17, связан с шлицевым валом 18 через установленную в стакане 19 втулку-шестерню 20. На одном конце шлицевого вала 18 неподвижно закреплен пальцевый съемник 21, а на другом установлен байонетный механизм в виде барабана 22 с профилированным пазом 23 и пальца с роликом 24. Барабан 22 - в корпусе 1, а палец с роликом 24 - в шлицевом валу 18 установлены неподвижно. Приемная часть отводящего лотка 25 снабжена щеткой 26 с радиусным пазом 27 для снятия обработанной детали и направляющей планкой 28. Шток привода 29 с толкателем 30 установлен в отводящем лотке 25 с возможностью возвратно-поступательного перемещения для проталкивания деталей в стапелирующий лоток 31 за отсекатель 32. Предлагаемое устройство работает следующим образом. В исходном положении деталь 13 из магазина 15 поступает в гнездо 12 захвата 11, а обработанная деталь перемеп ается из патрона 14 станка на пальчиковый съемник 21. При подаче питателя 2 вперед (поршень 3 остаётся на месте) щлицевой вал 18 получает вращательное движение через щестерен чатый блок 16 и втулку-щестерню 20, а поступательное, обратное движению питателя 2, от байонетного механизма - барабана 22 с профилированным пазом 23 и пальца с роликом 24. Во время спиралеобразного перемещения съемника 21 обработанная деталь, взаимодействуя с торцовой поверхностью щеки 26, снимается с него и скатывается в отводящий лоток 25, в зону толкателя 30. Движение питателя 2 вперед заканчивается в тот момент, когда деталь 13 передним торцом упрется в торец патрона станка, т. е. под действием подпружиненного пальца 6 и экрана 8 срабатывает бесконтактный датчик 10 цепи управления. Включается механизм зажима детали 13 в патроне станка, а пи3029 атель 2 получает сигнал на обратный ход. конце хода питателя 2 назад подпружиненый палец 5 и экран 7 воздействуют на есконтактный датчик 9, в результате чего включается механизм станка на обработку етали 13, а привод толкателя 30 на подачу вперед. Обработанная деталь 13 перемещается из отводящего лотка 25 в стапелирующий лоток 31, где она фиксируется отсекателем 32, а толкатель 30 возвращается в исходное положение. После обработки детали цикл повторяется. Формула изобретения Загрузочно-разгрузочное устройство, содержащее магазин, питатель, съемник и отводящий лоток, отличающийся тем, что, с целью повыщения производительности, съемник снабжен байонетным механизмом и связан с питателем посредством зубчато-реечного блока, а приемная часть отводящего лотка выполнена в виде щеки, расположенной эквидистантно налравлению перемещения съемника. Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 3899126, кл. В 23 Q 7/04, 1969. 2. Малов А. Н. Загрузочные устройства для металлорежущих станков, М., 1965, с. 252, ф. 145.
