(54) МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ВИДОВ РЕГУЛИРОВАНИЯ
ПОЛОЖЕНИЯ НАВЕСНЫХ ОРУДИЙ И ГИДРОУВЕЛИЧИТЕЛЯ
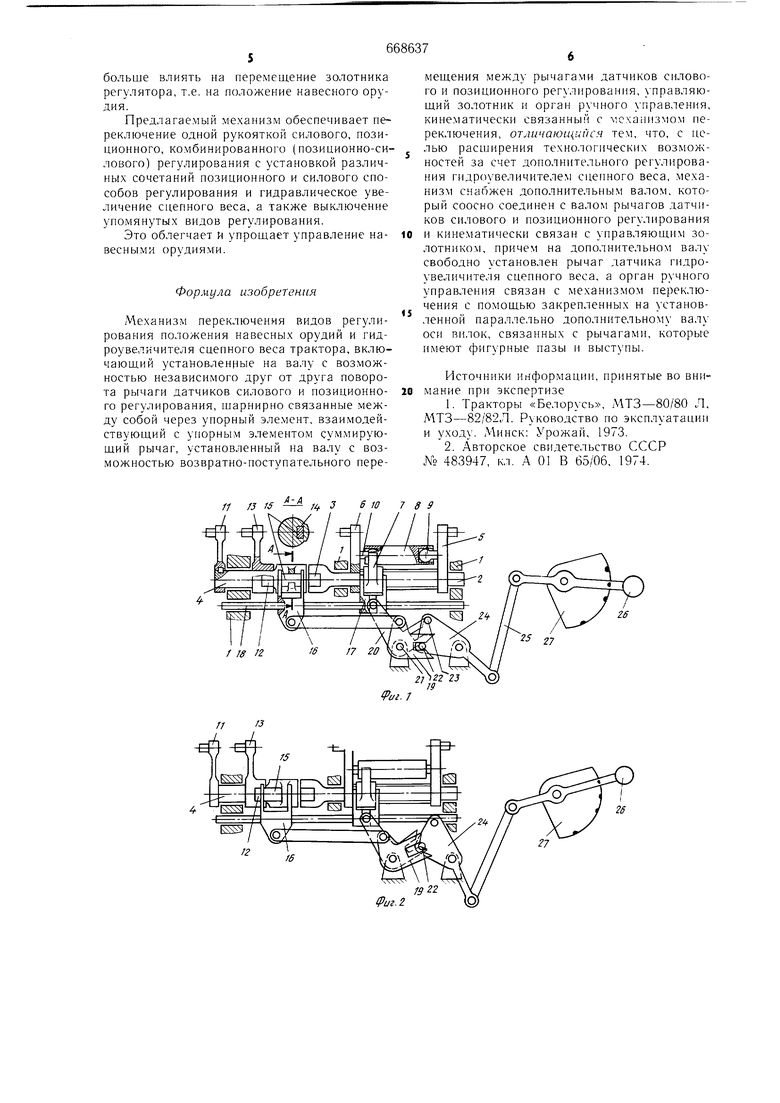
СЦЕПНОГО ВЕСА ТРАКТОРА датчиков силового и позиционного регулирования и кинематически связан с управляющим золотником, причем на дополнительном валу свободно установлен рычаг датчика гидроувеличителя сцепного веса, а орган ручного управления связан с механизмом переключения с помощью закрепленных на установленной параллельно дополнительному валу оси вилок, связанных с рычагами, которые имеют фигурные пазы и выступы. На фиг. 1 изображен механизм переключения видов регулирования в положении «регулятор выключен и разрез А-А; на фиг. 2 - то же, в положении «регулирование гидроувеличением сцепного па фиг. 3 - то же, в положении «позиционное регулирование; на фиг. 4 - то же, в положении «силовое регулирование. Механизм включает корпус 1, расположенный в не.м вал 2, на торце которого выполнен паз 3. Соосно валу 2 установлен дополнительный вал 4. На валу 2 установлены рычаг 5 датчика силового регулирования и рычаг 6 датчика позиционного регулирования с возможностью поворота их независимо друг от друга. На этом же валу 2 установлен управляемый суммируюпдий рычаг 7 с возможностью перемещения его по щлицам вала 2 и связанный с упорным элементом 8, соединенным сферическим шарниром 9 с рычагом 5 датчика силового регулирования, а сферическим шарниром 10 с рычагом 6 датчика позиционного регулирования. На дополнительном валу 4 жестко закреплен рычаг И, унравляюпшй золотником регулятора положений,снабженный пазом 12 рычаг 13 датчика гидроувеличителя сцегпюго веса с возможностью поворота. В пазу 14 вала 4 расположен соединительный элемент, выполненный в виде шпонки 15. Шпонка 15 и суммирующий рычаг 7 связаны соответственно с вилками 16 и 17, посаженными на оси 18, расположенной в корпусе 1 параллельно соосным валам 2 и 4. Вилка 16 шарнирно соединена с рычагом 19, а вилка 17 - с рычагом 20. Рычаги 19 и 20 посажены на общую ось 21 и снабжены фигурными пазами, взаимодействующими соответственно с выступами 22 и 23, выполненными на рычаге 24. Рычаг 24 связан тягой 25 с рукояткой 26 органа ручного управления, который снабжен сектором 27, имеющим отметки вида регулирования. Работает предлагаемый механизм следующим -образом. При положении рукоятки 26 на отметке сектора 27 «регулятор выключен щпонка 15 удерживается в пазу 14 второго вала 4 посредством вилки 16, рычага 19, выступа 22 на рычаге 24 и тяги 25, не входя ни в паз 3 первого вала 2, ни в паз 12 рычага 13 датчика гидроувеличителя сцепного веса, тем самым разъединяя рычаг 11, управляющий золотником регулятора положений, с рычагами 5, 6 и 13, т.е. с рычагами датчиков всех видов регулирования (см. фиг. 1). При установке рукоятки 26 на секторе 27 на отметку-«регулирование гидроувеличения сцепного веса происходит поворот рычага 24, выступ 22 которого, скользя по фигурному пазу рычага 19, поворачивает его. Поворот рычага 19 осуществляет перемещение вилки 16, а следовательно, и шпонки 15, вводя ее в паз 12 рычага 13 датчика гидроувеличителя сцепного веса, тем самым соединяя рычаг 11, управляющий золотником регулятора положений, через второй вал 4, шпонку 15 с рычагом 13 датчика гидроувеличителя сцепного веса, т.е. обеспечивается регулирование гидроувеличения сцепного веса трактора (см. фиг. 2). При установке рукоятки 26 на секторе 27 на отметку «позиционное регулирование происходит поворот рычага 24. Выступ 22 устан-авливается на край фигурного паза рычага 19, вызывая введение шпонки 15 в паз 3 первого вала 2, таким образом, связывая рычаг 11, управляющий золотником регулятора, через второй вал 4, шпонку 15, первый вал 2, суммирующий рычаг 7, упорный элемент 8, сферический шарнир 10 с рычагом 6 датчика позиционного регулирования, что обеспечивает позиционное регулирование положения навесного орудия (см. фиг. 3). При установке рукоятки 26 на секторе 27 на отметку «силовое регулирование выступ 22 выходит из зацепления с пазом рычага 19, чем сохраняется связь второго вала 4 с первым валом 2 через шпонку 15. Выступ 23, вощедший в фигурный паз рычага 20, вызывает поворот рычага 20, который, в свою очередь, перемещает вилку 17. а с ней суммирующий рычаг 7 в крайнее правое положение, что соответствует связи рычага II, управляющего золотником регулятора, через второй вал 4, шпонку 15. первый вал 2, суммирующий рычаг 7, упорный элемент 8, сферический шарнир 9 с рычагом 5 датчика силового регулирования, т.е. обеспечивается силовое регулирование положения найесного орудия (см. фиг. 4|. При установке рукоятки 26 на секторе 27 между отметками «позиционное регулирование и «силовое регулирование рычаг 11, управляющий золотником регулятора связан через второй вал 4, шпонку 15. первый вал 2, су.ммирующий рычаг 7, установленный между крайним левым и правым положениями, упорный элемент 8, сферические ц арпиры 9 и 10 с рычагами 5 и 6 датчиков силового и позиционного регулирования, чем достигается комбинирование двух видов регулирования. В зависимости от того, к какой отметке па секторе 27 «силовое или «позициоппое регулирование ближе установлена рукоятка 26, тот вид регулирования будет больше влиять на перемещение золотника регулятора, т.е. на положение навесного орудия. Предлагаемый ме.ханизм обеспечивает переключение одной рукояткой силового, позиционного, комбинированного (позиционно-силового) регулирования с установкой различных сочетаний позиционного и силового способов регулирования и гидравлическое увеличение сцепного веса, а также выключение упомянутых видов регулирования. Это облегчает я упрощает управление навесными орудиями. Формула изобретения Механизм переключения видов регулирования положения навесных орудий и гидроуве.личителя сцепного веса трактора, включающий установленные на валу с возможностью независимого друг от друга поворота рычаги датчиков силового и позиционного регулирования, шарнирно связанные между собой через упорный элемент, взаимодействующий с угюрным элементом суммирующий рычаг, установленный на валу с возможностью возвратно-поступательного пере// /5 « 6 W 789
/ S 2
П/
г
ui.J
Фиг. 2. мещения между рычагами датчиков силового и позиционного регулирования, управляющий золотник и орган ручного управления, кинематически связанный с механизмом переключения, отличающимися тем, что, с целью расширения технологических возможностей за счет дополнительного регулирования гидроувеличителем сцепного веса, механизм снабжен дополнительным валом, который соосно соединен с валом рычагов датчиков силового и позиционного регулирования и кинематически связан с управляющим золотником, причем на дополнительном валу свободно установлен рычаг датчика гидроувеличите;1я сцепного веса, а орган ручного управления связан с механизмом переключения с помощью закрепленных на установленной параллельно дополнительному валу оси вилок, связанных с рычагами, которые имеют фигурные пазы и выступы. Источники информации, принятые во внимание при экспертизе 1.Тракторы «Белорусь, МТЗ-80/80 Л, МТЗ-82/82Л. Руководство по эксплуатации и уходу. Минск: Урожай, 1973. 2.Авторское свидетельство СССР № 483947, кл. А 01 В 65/06, 1974. 6 fO 7 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| МЕХАНИЗМ ДЛЯ НАСТРОЙКИ, ПЕРЕКЛЮЧЕНИЯВИДОВ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РАБОЧИХОРГАНОВ ОРУДИЙ И УВЕЛИЧЕНИЯСЦЕПНОГО ВЕСА ТРАКТОРА!.2 | 1972 |
|
SU426615A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1980 |
|
SU967310A1 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| МЕХАНИЗМ ВЫРАВНИВАНИЯ НАГРУЗКИ ПО ОПОРНОЙ ПОВЕРХНОСТИ ТРАКТОРА | 2002 |
|
RU2236978C2 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Стенд для исследования навесных гидравлических систем | 1983 |
|
SU1204828A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |

иг.
