Изобретение относится к захватным устройствам, в частности для плавающих KOHTetbiepoB.
Известен захват для плавающих контейнеров, содержтций грузозахватную раму, соединенную с огибаемыми канатами блоками через шарнирно сочпененнь1е рычаги н оборудованную механизмом сцепления с контейнером н устройством слежения за волной 1.
Однако при опускании ргшм над плавающим контейнером, перемещающимся вертикалы{р на волне, до полной посадки е на контейнер, ра-. ма несколько раз соударяется с ним. При этом во время опускнаия контейнера на волне вес рамы передается на канаты, в результате чего канаты испытывают неравномерные динамические нагрузки от неоднократных соударений в веса рамы до момента полной посадки ее яа контейнер.
Известен также захват для контейнеров, содержащий подвешенную к крану посредством грузовых канатов и блоков траверсу, соединенную рычагами с несущей рамой, на которой установлены грузозахватные органы с приводами.
И закрепленные на траверсах гндроцнлнндры со шюками {2}.
Однако таким зшватом осуществляется демп ф|фоваиие маятниковых колебаний только в горизонтальной плоскости подьекеюго каната, а от вертикальных нгорузок канаты не разгружаются.
Целью изобретения является снижение динамических нагрузок на грузовые канаты и новыщение эффективности работы устройства.
Это достигается тем что корпус каждого гидроцрпищфа неподвижно закреплен на траверсе, а его шток щарннрно.соеданен с несущей рамой.
Кроме того, рычаги могут быть выполнены двухзвенными.
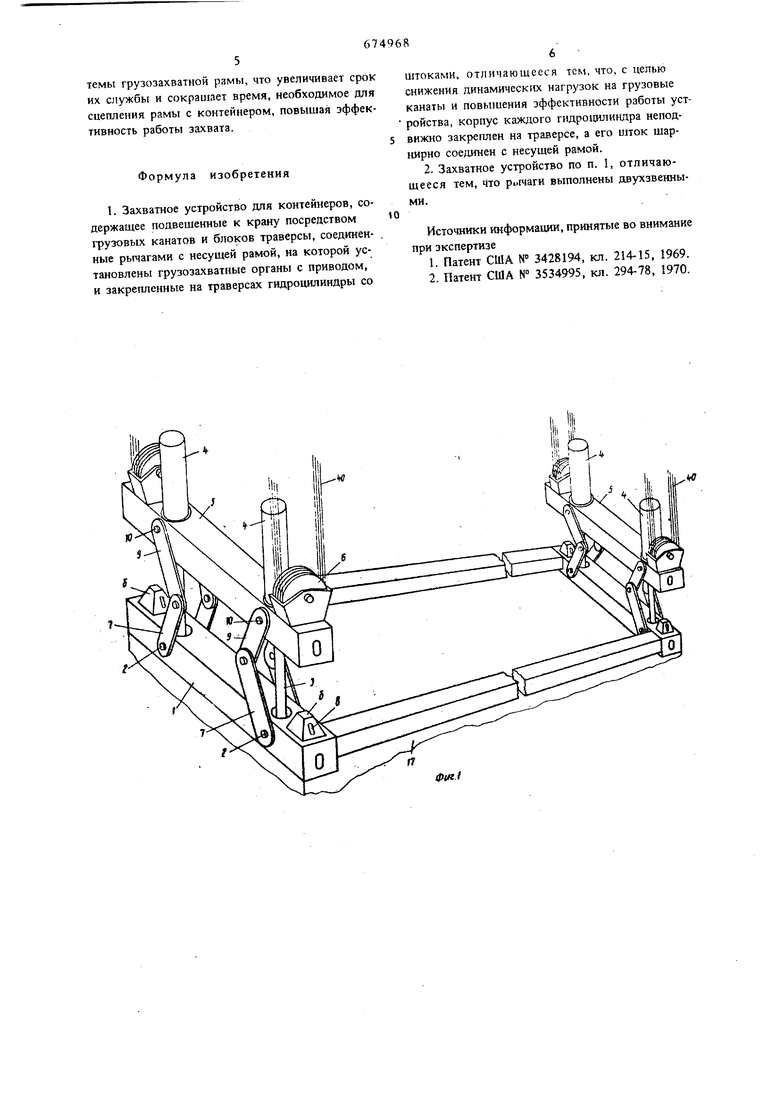
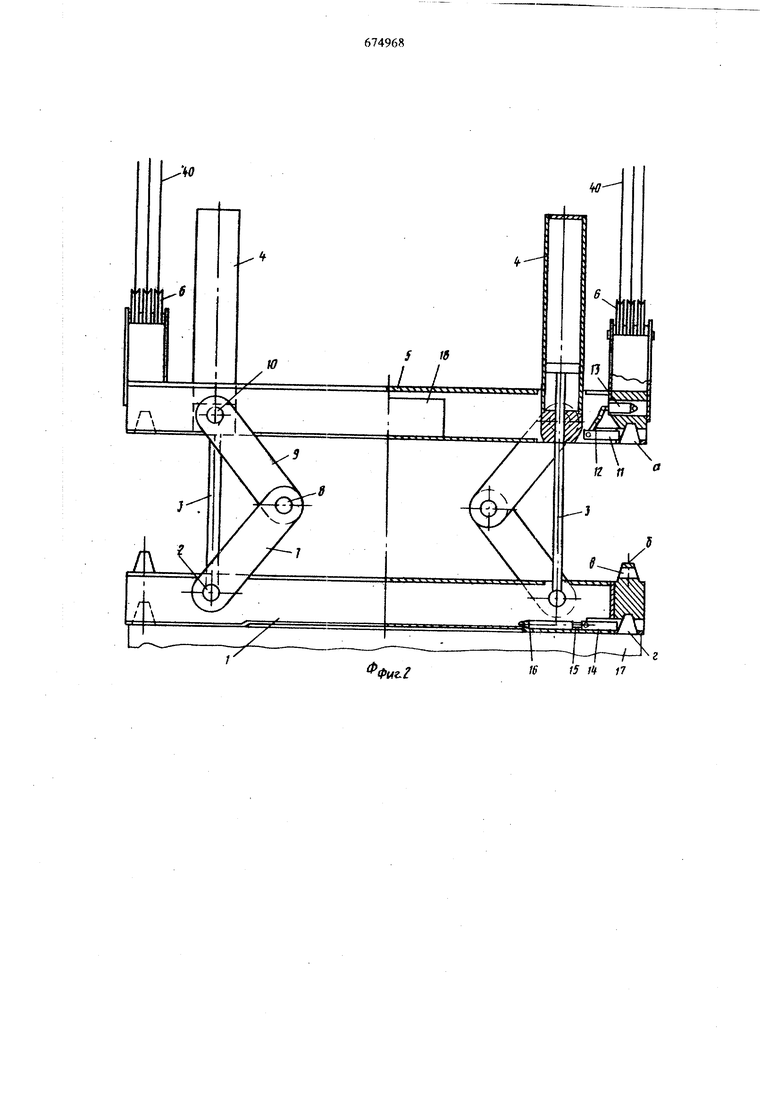
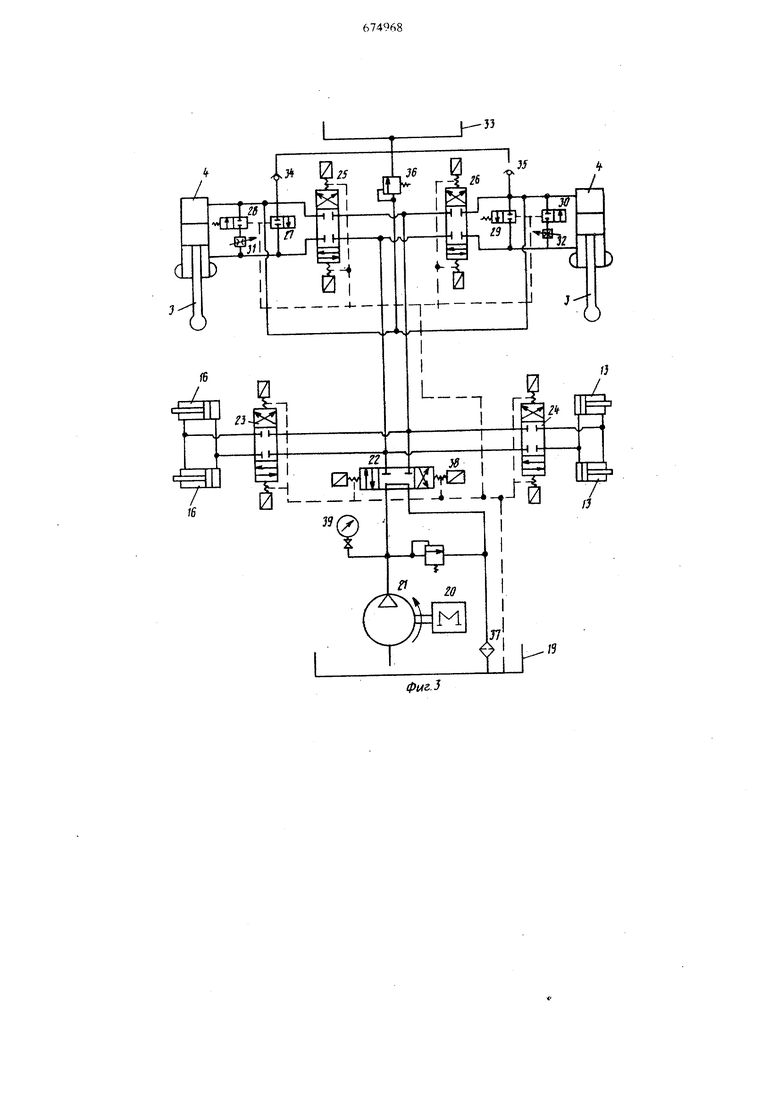
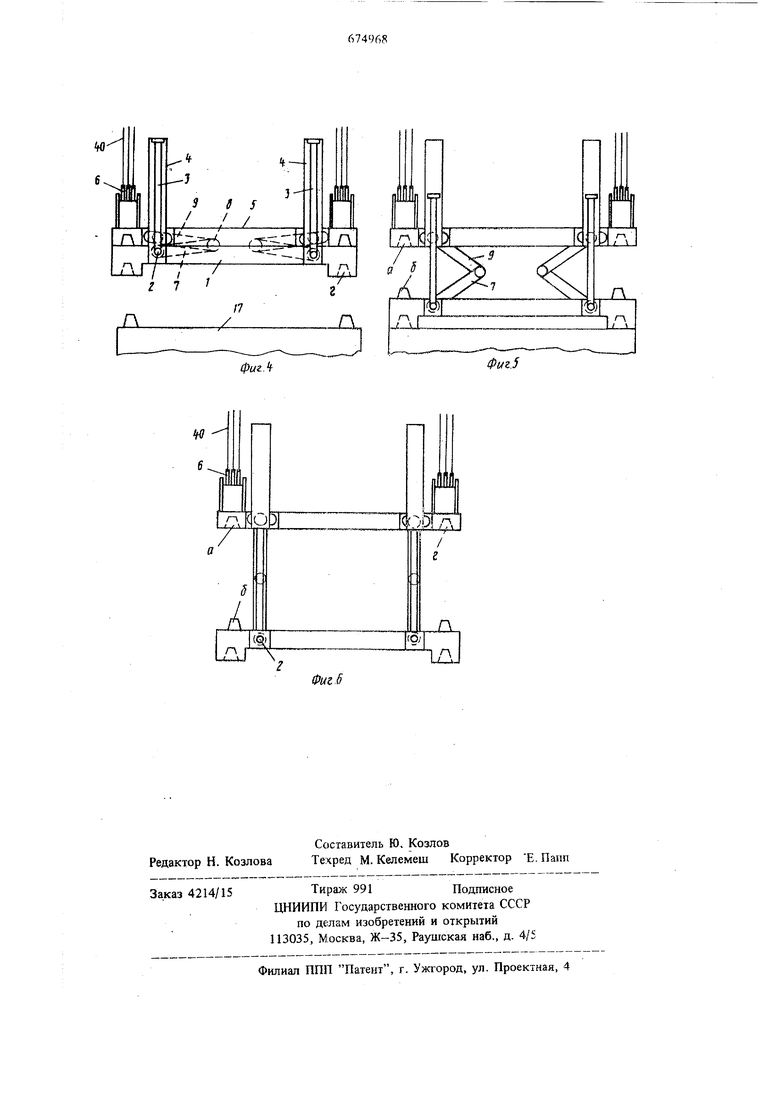
На фиг . 1 показан захват, общий вид; на фиг. 2 - то же, вид сбоку; иа фиг. 3 - гидравлическая схема работы захвата; на фиг. 4, 5 и 6 - различные положения захвата в момент его сцепления с контейнером.
Захватноеустройство нмеет несущую раму 1, соединенную t помюоцью щарниров 2 со цгтоками 3 псдроцилиндров 4. Вертикально расположенные гидроцилиндры 4 установлены поворотно на траверсах 5. на которых укреплены блоки
6 полиспастной системы. Траверсы 5 и несущая рама 1 coezntHCHbi между собой также рычагами, плечо 7 которых одним концом прикреплено через шарнир 2 к несущей раме 1, а другим через шарнир 8 к плечу 9. Последнее свободным концом соединено с траверсой 5 через шарнир 10, посредством, которого к ней крепится и гидроцилиндр 4,
Траверса обору цована устройствами для сцепления с несущей рамой , расположенными на ее концах. Каждое устройство для сцепления представляет собой запираюгдий элемент 11, перемещаемый рычагом 12, связанным со штоком горизонтально располржегаюго гидроцилиндра 13, По углам траверсы 5 со CTOpoifti грузозахват ной рамы имеются го|рам щальные вырезы а, в которые входят расположенмые на раме высту пы б аналогичной вырезу а формы. Кажд,ый BMciyij б имеет отверстие в дня прохождения элемента i 1 в момент сцепления траверсы с рамой. Рама оборудована также гжханизмом сцепления с контейне| ом, располо сенным на стороне, обращещюй к контейнеру, к выполненным в виде запирающего элемента 14, соединенного со штоком 15 горизонтально расположенного гидро цилиндра 16. Элементы 14 взаимодействуют с отверстиями выступов контейнера 17, входящих в в. вырезы г, выполненные ти раме.
Каждая траверса.оборудовалагидравлическими стан У1ями 18, приводящими в действие педрооборудование траверс и грузозахватной рамы. Гидравлическая схема включает бак 19, электродвигатель 20, приводящнй в движение насос 21, реверсивныераспределители 22-26, соединенные пщролвдиями с. электромагнитными клапанами 27-30, дросселями 31 и 32, гвдррцилиндрами 4, 13/16, компенсиругогдий бак 33, соединенный гидролиниями с обрат |ыми клапанами 34, 35, с пропускным клапаном 36, фильтром 37, предохранительным клапанол5 38 и манометром 39. Захват подщешеи на огибающих блоки 6 канатах 40, подсоединештых к грузоподъемному механиз
У--, ; -
Захват работает следующим образом.
Захват в сложенном положении (см. фп. 4) опускают на канатах 40 грузоподъемным механизмом над плавающим контейнером 17. Захват останавливают на такой высоте от контейнера, благодаря работе следящего устройства (не показано), при которой и верхнем положегош волны контейнер не достает до захвата, а в шжнем положении волны контейнер опускается ш расстояние, несколько меньшее, чем ход штоков 3 и ход вытя 1утых в одну Л1шию плеч 7 и 9 рычагов. После выполнения этой операции устройство для сцепления по команде освобождает грузозахватную раму от траверс в результате вы движения запирающих элементов 1Г при помощи рычагов 12 и гидроцилиндров 13. При этом
при включенных электродвигателе 20 и насосе 21 рабочая жидкость поступает через распределители 22 и 24 в гидроцилиндры 13. После освобождения рамы она,повисает на щтоках 3 гидроцили1щров 4. При этом клапаны 27-30 закрыты, а реверсивные распределители 25 и 26 обесточены и их золотники занимают среднее положение.
Затем рама 1, благодаря дросселированию рабочей жидкости через электромагнитные клапаны 28, 30 и дроссели 31 и 32, медленно опускается на щтоках 3 до соприкосновения с колеблющимся на волне контейнером 17, хотя бы одним из своих углов, в этот момент установленные на механизмах сцепления захватной рамы с контейнером концевые вьтключатели срабатывают и включают электромагниты клапанов 27 и 29. Клапань вь браны так, что они обеспечивают свободное перемещение.поршней гидроциливдров 4 со скоростью, большей скорости подъема и опускания контейнера на волне.
Рама садится на фитинги контейнера и они начш1ают колебаться вместе. За время колебания происходит сцепление рамы и контейнера, при котором запирающий элемент 14 штоком 15 гидроцилиндра 16 перемещается предусмотренные в фитингах контейнера отверстия. При этом рабочая жидкость от насоса 21 поступает через распределители 22 и 23. Следящая система контролирует относительное положение траверс, которые неподвижны,. и рамы с контейнером. После операции сцепления наступает врегля выжйдшшя и в момент положения контейнера с рамой на гребне волны от следящей системы поступает сигнал на закрытие электромагнитных кдананов 30, 29, 28 и дросселя 31 и контейнер зависает на щтокаХ 3 гидроцнлиндров 4. При зтом обеспечиваются минимальные динамические нагрузки на канаты 40 грузоподъемного устройства, так как зависание контейнера происходит при скорости, близкой к нулю. Затем включаются реверсивные распределители 25 и 26 и порщни гвдроцилиндров 4, перемещаясь вверх,, поднимают щтоки 3, а вместе с ними раму 1 с контейнером 17. Одновременно можно включить грузоподъемный механизм и приподнять контейнер над; водой. Подъем контейнера происходит до тех пор, пока выступы б рамы. не совместятся с вырезами а траверсы 5. Затем срабатывает сцепное устройство, т.е. запирающий элемент П проходит через отверстие б выступа б. После этого рама с контейнером и траверсой представляет собой едгшое целое. Далее контейнер краном перемещается вдоль судна и устанавливается в трюме или на палубе..
Таким образом, предлагаемая конструкщ1я захватного устройства для контейнеров позволяет устргшить непосредственное воздействие подъема н спада волны на канаты полиспастной сиетемы грузозахватной рамы, что увеличивает срок их службы и сокрашает время, необходимое для сцепления рамы с контейнером, повышая эффек тивность работы захвата. Формула изобретения 1. Захватное устройство для контейнеров, содержащее подвешенные к крану посредством грузовых канатов и блоков траверсы, соединенные рычагами с несущей рамой, на которой установлены грузозахватные органы с приводом, и закрепленные на траверсах гидроцилиндры со штоками, отличающееся тем, что, с целью снижения динамических нагрузок на грузовые канаты и повышения эффективности работы устройства, корпус каждого гидроцилиндра неподвижно закреплен на траверсе, а его шток шарjmpHO соединен с несущей рамой. 2. Захватное устройство по п. 1, отличающееся тем, что ригааги выполнены двухзвенными. Источники информации, принятые во внимание при экспертизе 1.Патент США N 3428194, кл. 214-15, 1969. 2.Патент США № 3534995, кл. 294-78, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для контейнеров | 1974 |
|
SU540798A1 |
| Патрон к токарному станку | 1978 |
|
SU674837A2 |
| Грузовая подвеска контейнерного крана | 1981 |
|
SU998304A1 |
| Тележка для крана мостового типа | 1980 |
|
SU895901A1 |
| Кран мостового типа | 1977 |
|
SU652091A1 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| Захватное устройство для лихтеров | 1977 |
|
SU727554A1 |
| Тележка мостового крана | 1980 |
|
SU895902A1 |
| Кран мостового типа | 1980 |
|
SU893825A2 |
IB 15 rt 17 3 8 S I I / nl;::fe-r rT f 7
W f. :;:
