(54) РАБОЧИЙ ОРГАН МАНИПУЛЯГОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU529072A1 |
| Устройство для управления манипулятором | 1976 |
|
SU692722A1 |
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| Устройство для регулирования жесткости прокатной клети | 1977 |
|
SU749479A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| СПОСОБ ПОЗИЦИОННО-СИЛОВОГО УПРАВЛЕНИЯ АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ С МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2023 |
|
RU2827123C2 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
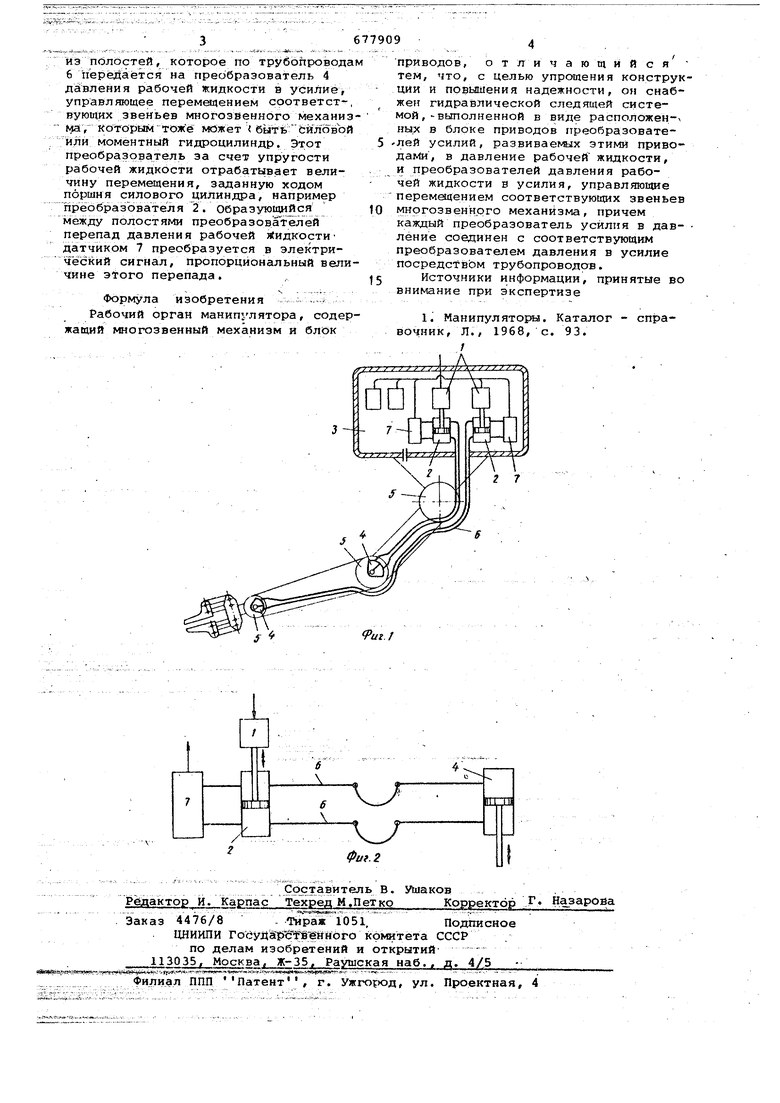
Изобретение относится к области машиностроения и может быть использ вано в дистанционно-управляемых манипуляторах. Известен рабочий орган манипулятора, содержащий многозвенный механизм и блок приводов 1. Недостатком этого устройства является то, что передача усилий от приводов к звеньям осуществляется посредством шестеренчатых передач. Однако использование таких передач усложняет конструкцию и снижает ее надежность. Целью настоящего изобретения явл ется устранение указанных недостатков. Цель достигается благодаря тому, что рабочий орган манипулятора снабжен гидравлической следящей системой, выполненной в виде расположенных в блоке приводов преобразоватедей усилий, развиваемых этими приводами, в давление рабочей жидкости, и преобразователей даЕления рабочей жидкости в усилия, упр ляющие перемещением соответствующих звеньев многозвенного механизма, пр чем кажды преобразователь усилия в давление соединен с соответствую щим преобразователем давления в усилие посредством трубопроводов. На фиг. 1 изображена принципиальная схема гидравлического управления перемещением одного из звеньев на фиг. 2 -.схема проводки трубопроводов. Рабочий орган манипулятора содержит блок приводов 1, преобразователь 2 усилия в давление рабочей жидкости, расположенный в блоке приводов хЗ, преобразователь 4 давления рабочей жидкости в усилие, размещенный, например, в шарнире 5 механизма. Эти преобразователи, число которых равно числу управляемых звеньев механизма, соединены между собой трубопроводами 6. В блоке приводов установлены датчики 7 давления, -предназначенные для информации о величине усилий. Принцип действия рабочего органа манипулятора заключается в следукячем. Привод 1 восттринимает сигнал управления и возяййствует на преобразователь 2 усилия в давление рабочей жидкости. Таким преобразователем может быть, например, силовой или моментный .гидроцилиндр. Его поршень создает избыточное давление в одной
из полостей, которое по трубопровода 6 передаётся на преобразователь 4 давления рабочей жидкости в усилие, управляющее перемодением соответст-, вующих звеяьев многозвенного механизма , Кот-орым тоже может быть: СИЛОВОЙ или моментный гидроцилиндр. Этот преобразователь за счет упругости рабочей жидкости отрабатывает величину перемещения, заданную ходом поршня силового цилиндра, например преобразователя 2. Образующийся между полостями преобразова телей перепад давления рабочей Жидкости датчиком 7 преобразуется в электрический сигнал, пропорциональный величине этого перепада.
Формула изобретения .,:,..„; Рабочий орган манипулятора, содержащий многозвенный механизм и блок
приводов, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, он снабжен гидравлической следящей системой, -выполненной в виде расположен-ч ных в блоке приводов преобразовате5 -лей усилий, развиваемых этими привода1 и, в давление рабочей жидкости,
и преобразователей давления рабочей жидкости в усилия, управляющие перемвцением соответствующих звеньев
многозвенного механизма, причем
каждый преобразователь усилия в давление соединен с соответствующим преобразователем давления в усилие посредсТвЬм трубопроводов.
5 Источники информации, принятые во внимание при экспертизе
Риг.г
