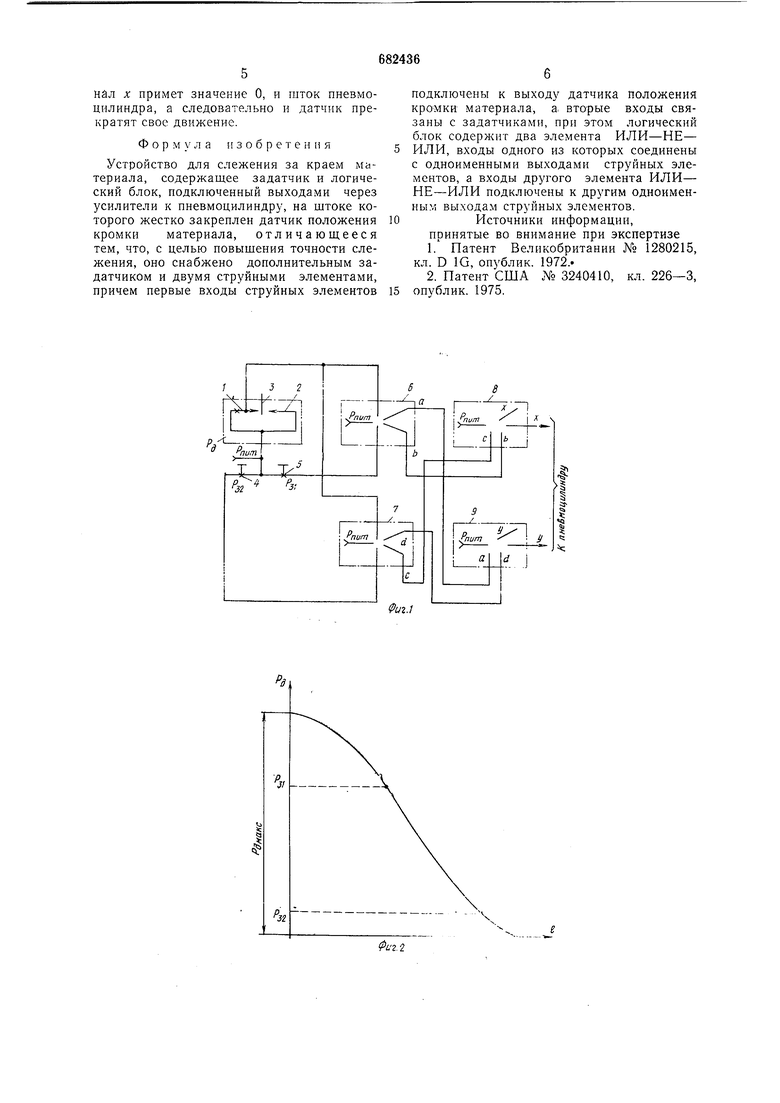
ззаимиого влияния двух близко расположенных параллельных струй. 2. Необходимость усложнения конструкции датчика для обеспечения возмол :ности регулирования зоны нечувствительности, например, за счет выполнения его из двух подвижных частей, каждая из которых содержит сопло и приемный канал. Необходимость регулировки зоны нечувствительности может быть вызвана, например, изменением скорости подачи обрабатываемого материала, а также видом возмущающих воздействий (характером изменения контура края по длине обрабатываемой детали), которые должны отрабатываться устройством. Целью изобретения является повышение точности слежения. Указанная цель достигается тем, что устройство для слежения за краем материала имеет дополнительный задатчик и два струйных элемента, причем первые входы струйных элементов подключены к выходу датчика, положения кромки материала, а вторые входы связаны с задатчиками, при этом логический блок содержит два элемента ИЛИ-НЕ-ИЛИ, входы одного из которых соединены с одноименными выхо.дами струйных элементов, а входы другого элемента ИЛИ-НЕ-ИЛИ подключены к другим одноименным выходам струйных элементов. На фиг. 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2 - статическая характеристика датчика положения кромки материала. Устройство состоит из датчика положения кромки материала, содержащего сопла 1 и 2, связанные с источником давления РПИЪ причем сопло 1 подключено к источнику давления через дроссель. Выполнение датчика положения кромки материала в виде двух сопл, связанных с источником давления, позволяет исключить засорение приемного канала (сопла, связанного с источником давления через постоянный дроссель) посторонними частицами из окружающей среды. Кромка 3 контролируемого материала проходит между соплами 1 и 2. Задатчики 4, 5 величины зоны нечувствительности выполнены в виде переменных дросселей, соединенных с источником давления РПИТ. Выходные сигналы Рд датчика положения кромки материала сигналы Psi и Рз2 задатчиков 4, 5 подключены к входам струйных элементов 6 и 7 (в качестве этих элементов могут быть использованы струйные усилители типа СТ 46 «Волга), выходы которых посредством каналов а, Ь, с, d пневматически связаны с соответствующими входами струйных элементов ИЛИ- НЕ-ИЛИ 8 и 9 (например, типа СТ 41 «Волга). Выходы элементов ИЛИ-НЕ- ИЛИ посредством каналов х, у через усилители (на чертежах не показаиы) соеди-. нены с полостями пневмоцилиндра, на щтоке которого жестко закреплен датчик положения кромки (пневмоцилиндр на чертежах не показан). Устройство работает следующим образом. По статической характеристике, отражающей зависимость выходного сигнала Рд датчика положения кромки материала от степени перекрытия кромкой материала сопл 1 И: 2, определяются зна1Чени:я сигналов Рз1 и Рз2 задатчиков 4, 5, которые устанавливаются с помощью переменных дросселей и обеспечивают заданную величину зоны нечувствительности датчика. При отсутствии кромки материала в датчике на его выходе имеет место максимальный выходной сигнал. В силу того, что в данном случае сигнал Рд Рдмакс больще значений сигналов Рз1 и Рз2 задатчиков 4 и 5, на выходе каната b элемента 6 и выходе канала с элемента 7 имеют место высокие уровни давления (сигнал на выходе каналов а и d равны нулю). На управляющие входы элемента ИЛИ- НЕ-ИЛИ 8 поступают по каналам Ь и с сигналы равные 1, в результате чего на прямом выходе элемента 9 выходной сигнал равен 1 (, ). После усиления сигнал поступает в полость пневмоцилиндра, шток которого начинает движение и перемещает датчик навстречу кромке материала. По мере перекрытия кромкой 3 материала зазора между соплами 1 и 2 сигнал датчика положения кромки начинает уменьшаться, и как только сигнал Рд датчика станет меньше сигналов Psi и Рз2 задатчиков 4 и 5 (кромка материала вощла в зону нечувствительности), сигнал по каналу а элемента 6 примет значение 1, а по каналу b - 0. На управляющий вход элемента 9 поступает по каналу а сигнал равный 1, который переключает последний, и сигнал у становится равным О, а у. Это приводит к останову штока пневмоцилиндра (выходной сигнал х 0, так как сигнал канала с элемента 7 равен 1). Если кромка материала займет такое положение, что сигнал датчика положения кромки примет значение меньшее, чем значение сигнала Рз2 задатчика 4, на выходе канала d элемента 7 будет сигнал равный 1, а на выходе канала с - равный 0. При этом на управляющие входы элемента 8 поступают сигналы равные О, поэтому на его прямом выходе появляется сигнал 1 (1, ). Сигнал х воздействует на пневмоцилиндр таким образом, что его шток перемещает датчик в направлении освобождения зазора между соплами от кромки материала. Как только кромка материала войдет в зону нечувствительности, т. е. будет выполняться условие , сиг
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмомеханическая система слежения за краем материала | 1980 |
|
SU967941A1 |
| Пневматический трехпозиционный регулятор | 1976 |
|
SU652531A1 |
| Устройство для управленияпНЕВМОпРиВОдОМ | 1979 |
|
SU840851A1 |
| Устройство для управления пнев-МОпРиВОдОМ | 1979 |
|
SU809062A1 |
| Формирователь вункции переключения для пневматических регуляторов с переменной структурой | 1976 |
|
SU690441A1 |
| Устройство для управления пнев-МОпРиВОдОМ | 1979 |
|
SU809061A1 |
| УРОВНЕМЕР ПРЕЗИЦИОННЫЙ ВЗРЫВОБЕЗОПАСНЫЙ | 2002 |
|
RU2249184C2 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматическая система автоматического регулирования загрузки двигателя уборочной машины | 1982 |
|
SU1113779A1 |
| Многопозиционный пневмопривод | 1980 |
|
SU877158A1 |
