Изобретение относится к области станкостроения и может быть использовано при создании высокопроизводительных металлорежущих станков, работающих в условиях автоматических линий, а такл-се для оснащения действующего металлорежущего оборудования, где при обработке резанием недопустимо образование лентообразной сливной стружки.
Известны конструкции устройств для кинематического стружколома«ия к токарны.м и другим станкам, в которых дробление стружки на элементы достигается за счет придания резцедержателю дополнительных колебательных движений .в направлении подачи посредством гидравлических следящих приводов, на управляющий золотник которых разными способами иодается управляющий сигнал по заданному закону движения {.
Известно также устройство с приводом управляющего золотника от электродвигателя с короткозамкнутым. ротором и встроенным редуктором, которое имеет возможность осуществлять бесступенчатое регулирование амплитуды Колебаний золотника за счет перестановки электродвигателя, а частота колебаний регулируется ступенчато с помощью встроенного в электродвигатель редуктора 2. Подобное устройство
может раоотать в диапазоне низкочастотных колеба), но не обеспечивает бесступенчатого регулирозания частоты колебаний.
Целью изобретения является обеспечение бесступенчатого регулирования как частоты колебаний, так и амплитуды колебаний управляющего золотнИКа гидравлического следящего при-вода зстройства для кинематического дробления стружки.
Для достижения этой цели в известном гидравлическом устройстве для кинематического дробления стружки в качестве пневматического генератора синусоидальных колебаний применены два пневматических воздухораспределителя с управляющими камерами, два дросселя и регулятор давления, при этом .воздухораспределители включены параллельно -ерез регулятор давления, а управляющие камеры одного из воздухораспределителей соединены со входами другого через дроссели.
Питание воздухом пневмопривода устройства для кинематического дробления стружки осуществляется от цеховой сети с применением стандартной распределительной аппаратуры.
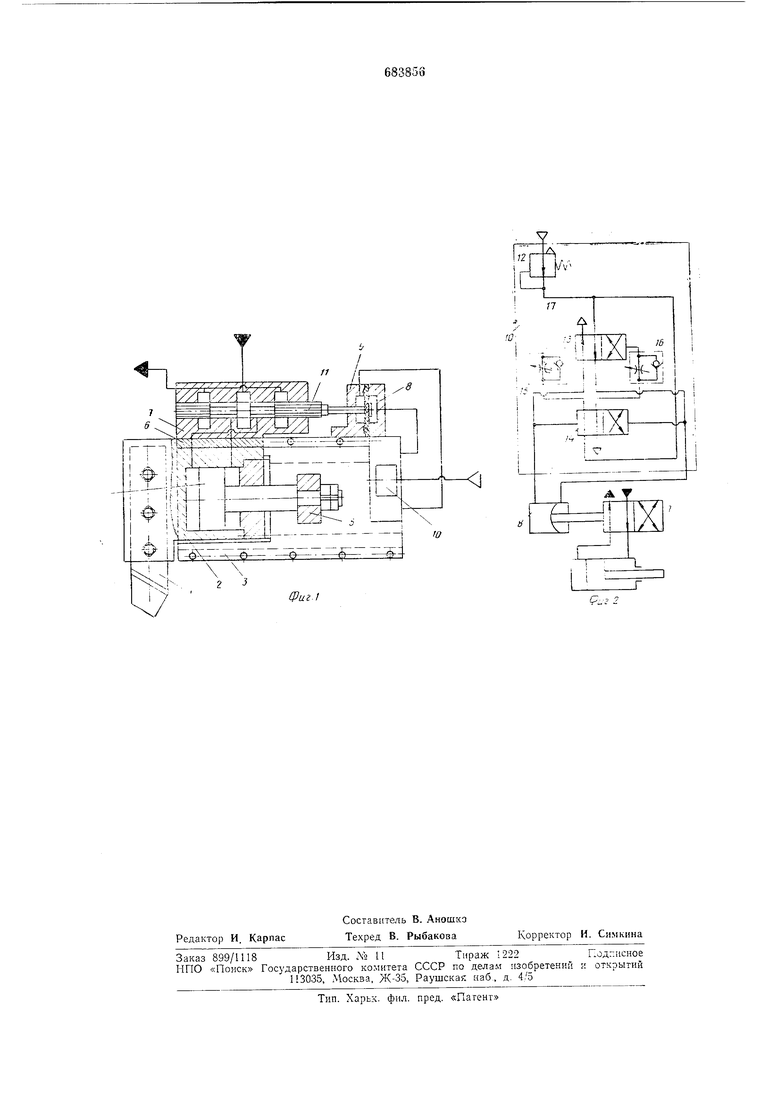
На фиг. 1 изображено устройство для кинематического дробления стружки в разрезе; на фиг. 2 - пневмогидравлическая схема устройства. Резец / закрепляется в корпусе вибросупеторта 2, который может перемещаться по направляющим 3, установленным вместо резцедержателя на суппорте станка так, чтобы перемещение вибросуппорта происходило IB направлении, параллельном линии центров станка. В корпусе 2 расточен цилиндр, куда входит поршень 4. Шток аТоршня крепитси в кронштейне 5, который приварен к верхней плите направляющих 3. К задней стенке корпзса 2 прикреплена болтами плита 6 с установленным на ней корпусом следящего золотника 7. Четырехкромочный золотник навинчен на щток мембранного пнезмоцилиндра 8, который при помощи кронштейна 9 закреплен на направляющих 3. На верхней плите направляющих 3 смонтирован генератор синусоидальных колебаний 10, возбуждающий .синусоидальные колебания мембраны пневмоцилиндра с определенной частотой и амплитудой. Пневмодилиндр приводит в движение золотник 11, а гидравлическая следящая система отрабатывает заданный на золотник сигнал. Управление системой осуществляется автоматически действующим двухпозиционным золотником 7 с приводом от пнсвмодвигателя 5 дкафрагменного типа двухстороннего действия, щток которого связан с золотником 7. Мембрана пневмодвигателя 8 приводится в дви.жение пневмогенератором синусоидальных колебаний 10. В качестве пневмогенератора синусоидальных колебаний применены: регулятор давления 12 типа В57-13, два пневматических воздухораспределителя 13 и 14 типа В63-11 с двухсторонним пневматическим управлением и два дросселя 15 и 16 типа В77-13. В положении, представленном на ф,иг. 2, воздух из цеховой сети через стандартную распределительную аппаратуру поступает через регулятор давления 12 в магистраль /7 и далее через распределитель 13 в штоковую полость мембранного пневмопривода. Одновременно воздух поступает и в правую полость управления распределителя 14. Левая полость мембранного пневмоцилиндра и левая полость управлепия воздухораспределителя 14 через воздухораспределитель 13 соединена с атмосферой. Работа устройства осуществляется следующим образом. Под действием сжатого воздуха золотник воздухораспределителя М переключается, и сжатый воздух из маг :страли 15 через золотник воздухораспределителя 14, дроссель 16 поступает в правую полость управления воздухораспределителя 13. Воздухораспределитель 13 переключается, сжатый воздух из магистрали 15 через воздухораспределитель 13 поступает в бесщтоковую полость мембранного пневмодвигателя ;: в левую полость управления воздухораспределителя 14. Воздух из штоковой полости и правой полости управления воздухораспределителя 14 сбрасывается в атмосферу. Под действием сжатого воздуха воздухораспределитель 14 переключается, и сжатый воздух из магистрали 15 через каналы воздухораспределителя 14, дроссель 15 переключит воздухораспределитель 13. Далее цикл повторяется. Частота колебаний резца регулируется изменением подводи.мого к золотникам 13 и 14 давления воздуха и дросселями 15 и 16. Формула изобретения Устройство для кинематического дробления стружки, включающее гидравлический силовой цилиндр, управляемый следящп.м золотником, жестко соединенныг.1 со штоком мембранного пневмоцилиндра, на который подается задающий сигнал от пневмогенератора синусоидальных колебаний, отличающееся тем, что, с целью обеспечения бесступенчатого регулирования частоты и амплитуды колебаний, генератор синусоидальных колебаний выполнен в виде двух воздухораспределителей с управляющими камерами, двух дросселей и регулятора давления, при этом воздухораспределители включены параллельно через регулятор давления, а управляющие камеры одного из воздухораспределителей соединены со входами другого через дроссели. , Источники информации, принятые во внимание при экспертизе: 1.Баранов В. Н. « др. Электрогидравлические н гидравлические вибрационные ме.канизмы. М., «Мащиностроепие, 1966, с. 185. 2.Там же, с. 189.
ФигL

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство к токарным станкам для кинематического дробления стружки | 1959 |
|
SU123011A1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Устройство для дробления стружки | 1977 |
|
SU722689A2 |
| Сверлильная головка | 1979 |
|
SU918063A2 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| Пневматический следящий привод | 1983 |
|
SU1137257A1 |
| ЛЕНТОЧНОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ДЛИННОМЕРНЫХ ИЗДЕЛИИ | 1973 |
|
SU395239A1 |
| Пневматическое переносное заворачивающее устройство с автоматической подачей винтов | 1980 |
|
SU921841A1 |
| Сверлильная головка | 1983 |
|
SU1131606A1 |