Поставленная цель достигается тем что в предлагаемый дозатор введены блок предварения и блок умножения на постоянный коэЛфициент, а каждый из приводов снабжен, подключенной к выходу пневмодвигателя цепью из преобразователя скорости пневмодвигателя, VIOдклroчeннoгo к первому входу нормируюсдего преобразователя, второй вход которого связан с задатчиком, аналового сигнала, а выход соединен с первым входом блока сравнения, выход которого через корректирующий прибор подключен к первому входу блока алгебраического суммирования, подключенного к входу исполнительного механизма, причем второй вход блока сравнения каждого привода подключен к выходу блока предварения,..вход которого соединен с выходом регулятора , а вторые входы блоков алгебраического суммирования соединены с выходом блока умножения на постоянный коэффициент, вход которого соединен с выходом задатчика производителности.
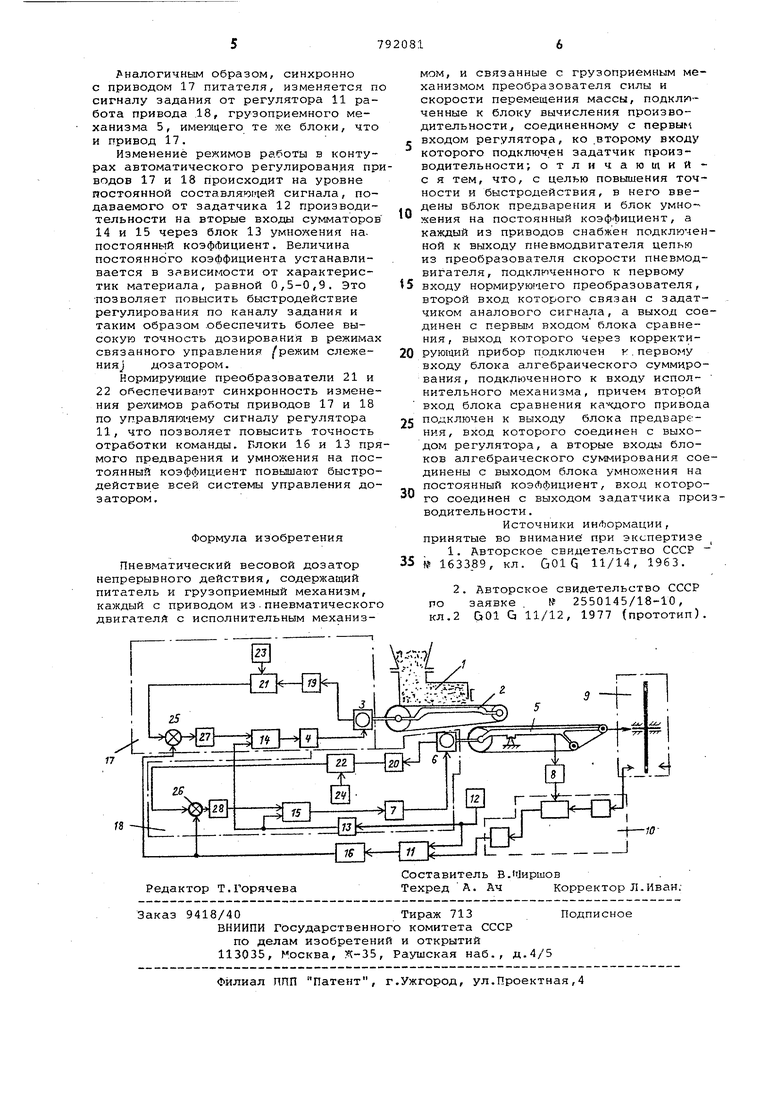
На чертеже представлена блок-схем предлагаемого дозатора.
Он содержит загрузочный механизм 1, .питатель 2 с пневмодвигателем 3 и исполнительным механизмом 4, грузоприемный механизм 5 с пневмодвигателем 6 и исполнительным механизмом 7, преобразователь 8 сиЛы, преобразователь 9 скорости перемещения масс блок 10 вычисления производительност входы которого соединены с выходами преобразователей 8 и 9, а выход подкЛ эчен к первому входу регулятора 11, второй вход которого соединен с задачином 12 производительности. Задатчик 12 производительности подключен к блоку 13.умножения на постоянный коэЛфициент блоков 14 и 15 алгебраического суммирования. Регулятор 11 через блок 16 прямого предварения связан с приводом 17 питателя 2 и приводом 18 грузоприемного механизма 5 .
Каждый из приводов 17 и 18 выполнен в виде замкнутого контура автоматического регулирования и содержит последовательную цепь: преобразователь 19 (20 скорости пневмодвигателя -3 (, б ), нормирующий преобразователь 21 (22 с задатчиком 23 (24), блок 25 (26) сравнения, корректирующий прибор 27 (28) , блок 14 (15) алгебраического суммирования. Пепь замнута соответственно через исполнител ные мexaкиз / Ы 4 и 7 и пневмодвигатели 3 и 6.
Работает дозатор следующим образом..
Сыпучий материал из загрузочного механизма 1 подается питателем 2 на грузоприемный механизм 5, Аналоговый сигнал, пропорциональный массе материала на ленте грузоприемного механизма 5, с выхода преобразователя В силы поступает на первый вход блок 10 вычисления производительности, на другой вход которого с выхода преобразователя 9 скорости подается сигнал, пропорциональный скорости перемещения массы на грузоприемном механизме 5.
Сигнал, пропорциональный текущему значению производительности, с зыхода блока 10 подается на первый
вход регулятора 11, где происходит его сравнение с подводимым на второй вход регулятора 11 сигналом задания от задатчика 12 производительности. В результате сравнения сигналов в регуляторе 11 вырабатывается управляющее воздействие, которое через блок 16 прямого предварения подается на приводил 17 и 18.
Сигнал управляющего воздействия Q введенным воздействием по скорости его отклонения с выхода блока 16 поступает в качестве сигнала задания непосредственно на вторые входы блоков 25 и 26 сравнения сигналов.
На.первые входы блоков 25 и 26: сравнения сигналов поступают сигналы, пропорциональные соответственно скорости вращения пневмодвигателей 3 и 6. Сигналы, пропорциональные скорости движения ленты, формируются следующим образом. Преобразователь 19 скорости соединен с нормирующим преобразователем 21, на второй вход которого поступает сигнал от задатчика 23 аналогового сигнала. Аналогично выполнена схема соединения преразователя 20 в схеме автоматическог регулирования скоростью пневмодвигатля 6. При помои .и задатчиков 23 и 24 аналогового сигнала осуществляется согласование статических характеристик управления скоростью вращения пневмодвигателей 3 и 6, что позволяе выполнить синхронные изменения скоростей ленты питателя 2 и грузоприемного механизма 5. Таким образом, на вторые входы блоков 25 к 26 поступают нормированные сигналы .пропорциональные скорости вращения пневмодвигателей 3 и 6.
При появлении рассогласования между сигналами текущего значения скорости и заданного р.егулятором 11, блок 25 сравнения сигналов вырабатывает сигнал ошибки, поступающий на вход корректирующего прибора 27, который вырабатывает по заданному закону, например пропорционально-интегральному/, управляющее воздействие. Сигнал управляющего воздействия через блок 14 алгебраического суммирования на исполнительный механизм 4, изменяя давление на его выходе, что приводит к изменению угловой скорост связанного с ним пневмодвигателя 3 питателя 2, приводя тем самым в соответствие с заданной.

| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор непрерывного действия | 1979 |
|
SU798739A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU746197A1 |
| Дозатор непрерывного действия | 1979 |
|
SU826292A1 |
| Устройство контроля тарировки дозаторов | 1976 |
|
SU651203A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Весовой дозатор непрерывного действия | 1981 |
|
SU979876A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU932266A1 |
