(54) МАНИПУЛЯТОР ДЛЯ КОВОЧНЫХ ВАЛЬПОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Способ изготовления топоров | 1982 |
|
SU1080908A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Способ объемной штамповки топоров | 1986 |
|
SU1382577A1 |
| Устройство для подачи полосового и ленточного материалов в штамп | 1983 |
|
SU1138212A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1986 |
|
SU1349853A1 |
1
Изобретение относится к обработке металлов давлением и может быть использовано при выполнении технологической операции раскатки полотна топора.
Известен манипулятор ковочных вальцов для раскатки полотна топора, содержащий основание, установленное на основании плиту и каретку с захватным устройством, расположенную в центре плиты с возможностью радиального перемещения и вращения в плоскости, параллельной плоскости плиты,и привод 1.
Недостатком известного манипулятора является его громоздкость и невозможность применения для раскатки полотна топора, так как он не обеспечивает необходимых геометрических параметров изделия.
Целью изобретения является повыщение точности и стабильности геометрических размеров изделия.
Поставленная цель достигается тем, что предлагаемый манипулятор снабжен копиром, жестко связанным с захватным устройством и плита выполнена со спиральной канавкой с переменным шагом, контактирующей с копиром, при этом каретка выполнена с направляющими пазами для перемещения в них захватного устройства, а плита установлена с возможностью вертикального возвратно-поступательного движения, кроме этого, захватное устройство подпружинено вдоль своей оси.
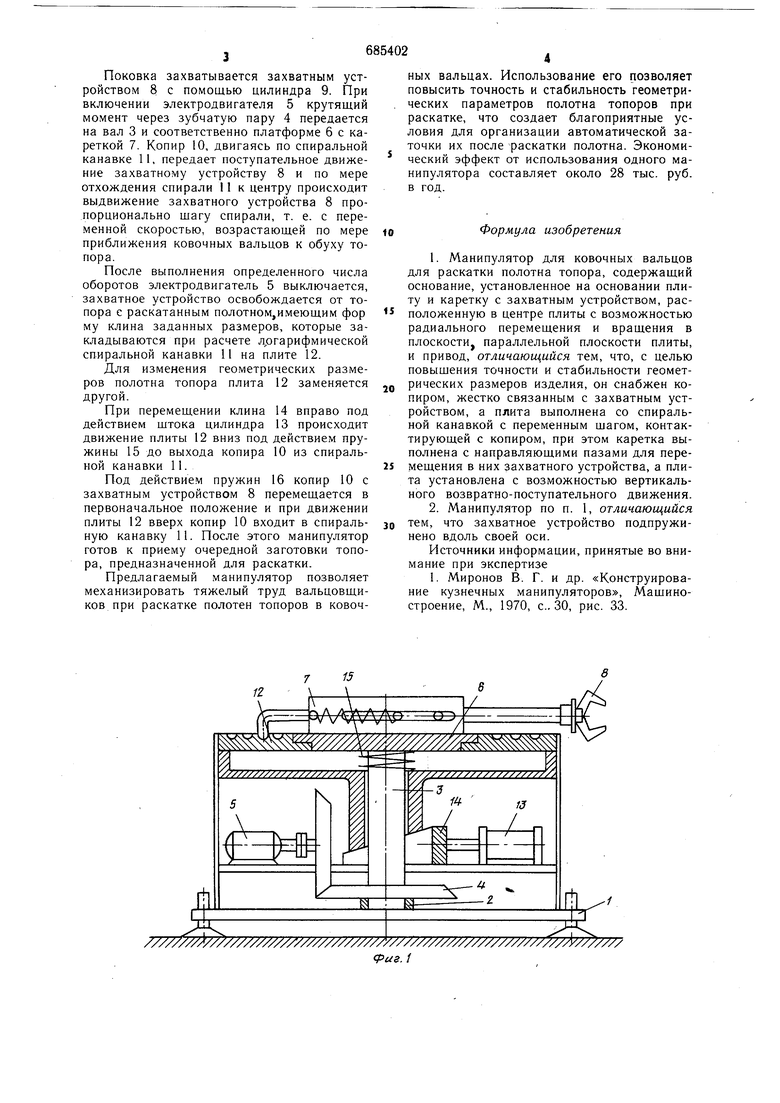
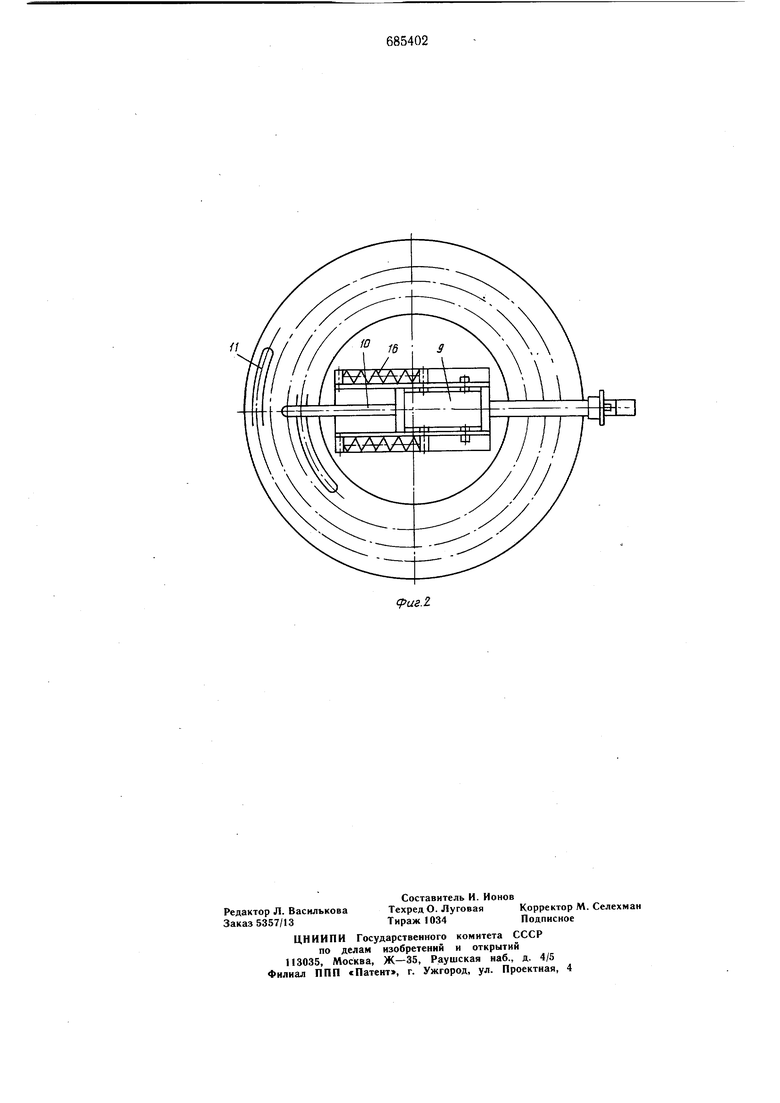
На фиг. 1 показан манипулятор, общий вид, разрез; на фиг. 2 - то же, вид сверху.
Манипулятор для раскатки полотна топора содержит основание 1 с подпятником 2,
в котором установлен вал 3, приводимый во вращение через зубчатую пару 4 электродвигателем 5. Вал соединен с платформой 6 с жестким креплением на ней направляющей каретки 7 с направляющими пазами,
в которой перемещается захватное устройство 8 с цилиндром 9 захвата, захватное устройство связано с копиром 10 так, что копир может двигаться по спиральной канавке 11 плиты Г2. Предусмотрен выход копира из канавки, который осуществляется
при помощи цилиндра 13, клина 14 и пружин 15 и 16.
Манипулятор работает следующим образом. Поковка захватывается захватным устройством 8 с помощью цилиндра 9. При включении электродвигателя 5 крутящий момент через зубчатую пару 4 передается на вал 3 и соответственно платформе 6 с кареткой 7. Копир 10, двигаясь по спиральной канавке 11, передает поступательное движение захватному устройству 8 и по мере отхождения спирали 11 к центру происходит выдвижение захватного устройства 8 пропорционально щагу спирали, т. е. с переменной скоростью, возрастающей по мере приближения ковочных вальцов к обуху топора. После выполнения определенного числа оборотов электродвигатель 5 выключается, захватное устройство освобождается от топора с раскатанным полотном,имеющим фор му клина заданных размеров, которые закладываются при расчете лргарифмической спиральной канавки 11 на плите 12. Для изменения геометрических размеров полотна топора плита 12 заменяется другой. При перемещении клина 14 вправо под действием штока цилиндра 13 происходит движение плиты 12 вниз под действием пружины 15 до выхода копира 10 из спиральной канавки 11. Под действием пружин 16 копир 10 с захватным устройством 8 перемещается в первоначальное положение и при движении плиты 12 вверх копир 10 входит в спиральную канавку 11. После этого манипулятор готов к приему очередной заготовки топора, предназначенной для раскатки. Предлагаемый манипулятор позволяет механизировать тяжелый труд вальцовщиков при раскатке полотен топоров в ковочных вальцах. Использование его позволяет повысить точность и стабильность геометрических параметров полотна топоров при раскатке, что создает благоприятные условия для организации автоматической заточки их после раскатки полотна. Экономический эффект от использования одного манипулятора составляет около 28 тыс. руб. в год. Формула изобретения 1.Манипулятор для ковочных вальцов для раскатки полотна топора, содержащий основание, установленное на основании плиту и каретку с захватным устройством, расположенную в центре плиты с возможностью радиального перемещения и вращения в плоскости, параллельной плоскости плиты, и привод, отличающийся тем, что, с целью повышения точности и стабильности геометрических размеров изделия, он снабжен копиром, жестко связанным с захватным устройством, а плита выполнена со спиральной канавкой с переменным щагом, контактирующей с копиром, при этом каретка выполнена с направляющими пазами для перемещения в них захватного устройства, а плита установлена с возможностью вертикального возвратно-поступательного движения. 2.Манипулятор по п. 1, отличающийся тем, что захватное устройство подпружинено вдоль своей оси. Источники информации, принятые во внимание при экспертизе I. Миронов В. Г. и др. «Конструирование кузнечных манипуляторов. Машиностроение, М., 1970, с.. 30, рис. 33.
