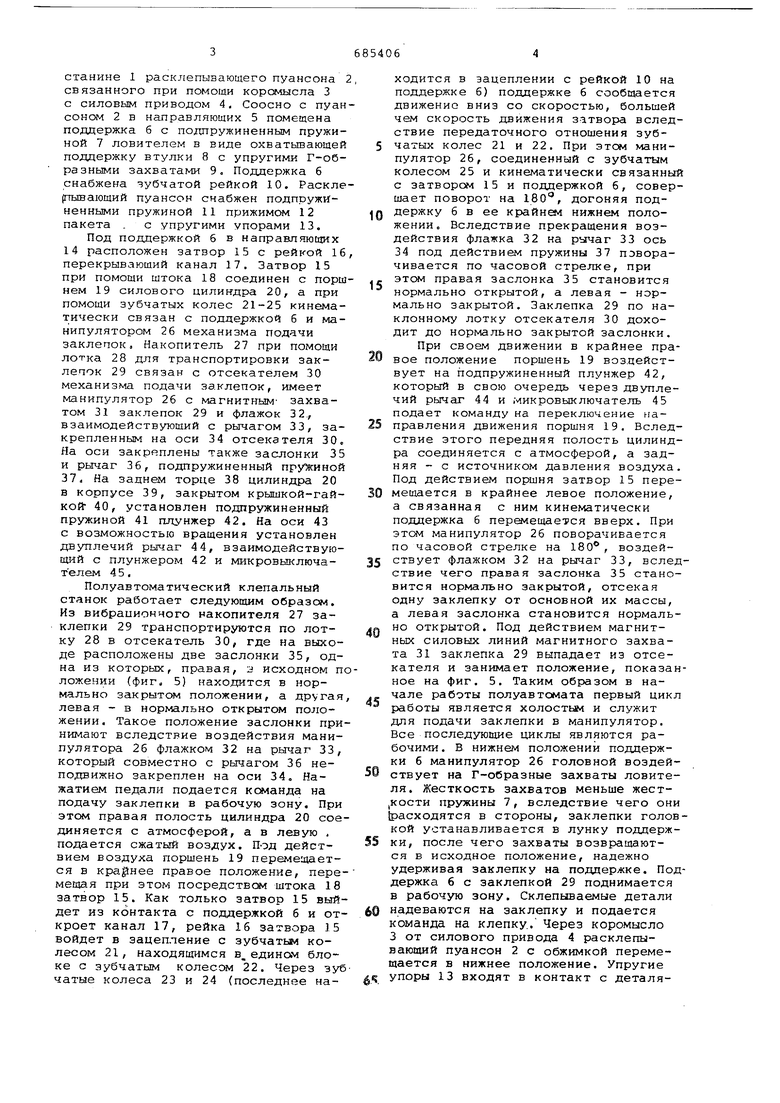
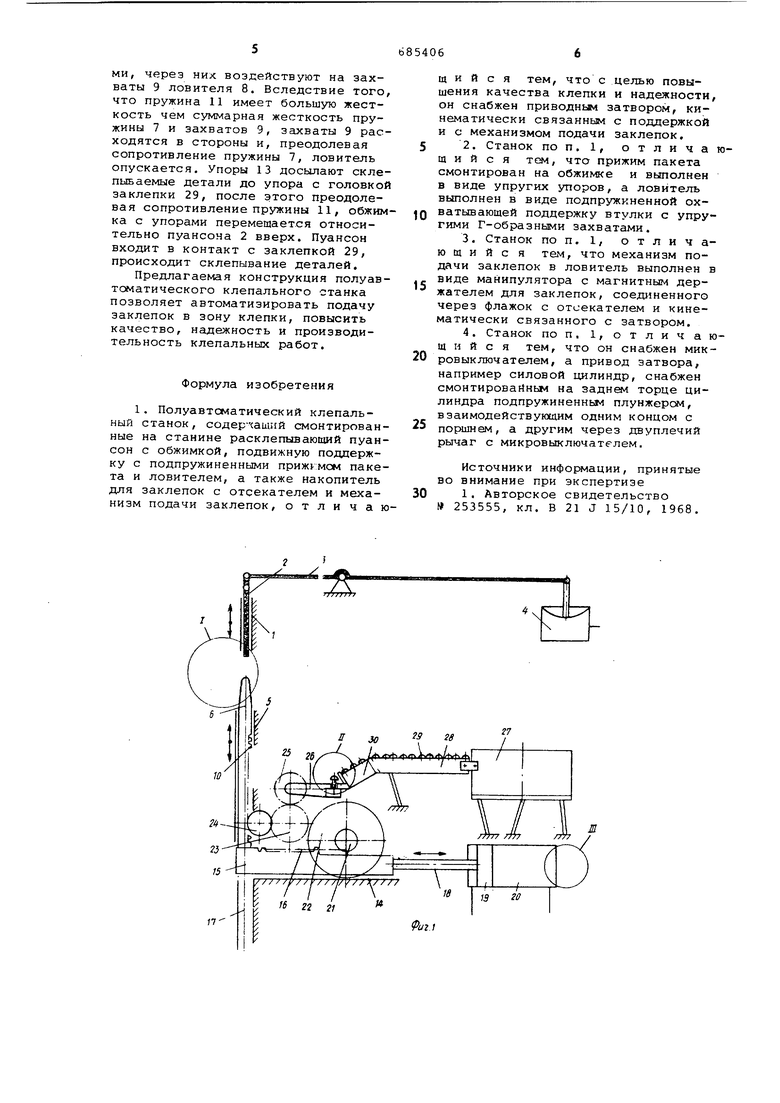
Изобретение относится к области клепально-сборочных работ, в частности к клепальному оборудованию. Известен полуавтоматический клепальный станок, содержащий смонтированные на станине расклепывающий пуансон с обжимкой, подвижную подде жку с подпружиненным прижимом пакета и ловителем, а также накопитель для заклепок с отсекателем и механи подачи заклепок 1. Однако известный станок предназначен для клепки трубчатьми заклепками, что требует увеличения рабоче го цикла для предварительного ориен тирования склепываемых деталей по ловителю с последующей подачей заклепки и ее клепки, при этом подача заклепок не обеспечивает надежность и качество клепки, а также не обеспечивается клепка сплошными заклепками. Целью изобретения является повышение качества клепки и надежности. Поставленная цель достигается тем, что предлагаемый станок снабжен приводным затвором, кинематичес ки связанным с поддержкой и с механизмом подачи заклепок, прижим пакета смонтирован на обжимке и выполнен в виде упругих упоров, а ловитель выполнен в виде подпружиненной охватывающей поддержку втулки с упругими Г-образньми захватами. Механизм подачи заклепок в ловитель выполнен в виде манипулятора с магнитным держателем для заклепок, соединенного через флажок с отсекателем и кинематически связанного с затвором. Станок имеет микровыключатель, а привод затвора, например силовой цилиндр, снабжен смонтированным на заднем торце цилиндра подпружиненным плунжером, взаимодействующим одним концом с поршнем, а другим через двуплечий рычаг с микровыключателем. На фиг. 1 изображена кинематическая cxei-ia предлагаемого клепального ртанка;на фиг. 2 - узел 1 на фиг. 1; на фиг.З -узел II на фиг, 1, механизм подачи заклепок;на фиг. 4 узел III на фиг. 1, привод за- . твора; на фиг. 5 - сечение по А-А на фиг. 2; на фиг. 6 - сечение по Б-Б на фиг. 2; Полуавтоматический клепальный станок состоит из смонтированного на
станине 1 расклепывающего пуансона 2 связанного при помощи корсмысла 3 с силовым приводом 4, Соосно с пуансонсм 2 в направляющих 5 помещена поддержка 6 с подпружиненным пружиной 7 ловителем в виде охватывающей поддержку втулки 8 с упругими Г-образньами захватами 9, Поддержка 6 снабжена зубчатой рейкой 10. Раскле(пывающий пуансон снабжен подпружиненными пружиной 11 прижимом 12 пакета . с упругими упорами 13,
Под поддержкой 6 в направляю111их 14 расположен затвор 15с рейкой 16 перекрывающий канал 17. Затвор 15 при помоши штока 18 соединен с поршнем 19 силового цилиндра 20, а при помощи зубчатых колес 21-25 кинематически связан с поддержкой 6 и манипулятором 26 механизма подачи заклепок, Накопитель 27 при помощи лотка 28 для транспортировки заклепок 29 связан с отсекателем 30 механизма подачи заклепок, имеет манипулятор 26 с магнитным захватом 31 заклепок 29 и флажок 32., взаимодействуюший с рычагом 33, закрепленным на оси 34 отсекателя 30. На оси закреплены также заслонки 35 и рычаг 36, подпружиненный пружиной 37. На заднем торце 38 цилиндра 20 в корпусе 39, закрытом крышкой-гайкой- 40, установлен подпружиненный пружиной 41 плунжер 42. На оси 43 с возможностью вращения установлен двуплечий рычаг 44, взаимодействующий с плунжером 42 и микровыклгочателем 4 5,
Полуавтоматический клепальный станок работает следующим образом. Из вибраииончого накопителя 27 заклепки 29 транспортируются по лотку 28 в отсекатель 30, где на выходе расположены две заслонки 35, одна из которых, правая, а исходном пложении (фиг. 5) находится в нормально закрытс 4 положении, а другая левая - в нормально открытом положении. Такое положение заслонки принимают вследствие воздействия манипулятора 26 флажком 32 на рычаг 33, который совместно с рычагом 36 неподвижно закреплен на оси 34. Нажатием педали подается команда на подачу заклепки в рабочую зону. При этом правая полость цилиндра 20 соединяется с атмосферой, а в левую , подается сжатый воздух. Под действием воздуха поршень 19 перемещается в крайнее правое положение, перемещая при этом посредствен штока 18 затвор 15. Как только затвор 15 выйдет из контакта с поддержкой б и откроет канал 17, рейка 16 затвора 15 войдет в зацепление с зубчатьм колесом 21, находящимся в, едином блоке с зубчатым колесе 22. Через зубчатые колеса 23 и 24 (последнее находитея в зацеплении с рейкой 10 на поддержке 6) поддержке 6 сообщается движение вниз со скоростью, большей чем скорость движения затвора вследствие передаточного отношения зубчатых колес 21 и 22, При этом манипулятор 26, соединенный с зубчатым колесом 25 и кинематически связанный с затвором 15 и поддержкой 6, совершает поворот на 180, догоняя поддержку 6 в ее крайнем нижнем положении. Вследствие прекращения воздействия флажка 32 на ръгчаг 33 ось 34 под действием пружины 37 поворачивается по часовой стрелке, при этом правая заслонка 35 становится нормально открытой, а левая - нормально закрытой. Заклепка 29 по наклонному лотку отсекателя 30 доходит до нормально закрытой заслонки.
При своем движении в крайнее правое положение поршень 19 воздействует на подпружиненный плунжер 42, который в свою очередь через двуплечий рычаг 44 и .микровыключатель 45 подает команду на переключение направления движения поршня 19. Вследствие этого передняя полость цилиндра соединяется с атмосферой, а задняя - с источником давления воздуха. Под действием поршня затвор 15 перемещается в крайнее левое положение, а связанная с ним кинематически поддержка 6 перемещается вверх. При этом манипулятор 26 поворачивается по часовой стрелке на 180 , воздействует флажком 32 на рычаг 33, вследствие чего правая заслонка 35 становится нормально закрытой, отсекая одну заклепку от основной их массы, а левая заслонка становится нормально открытой. Под действием магнитных силовых линий магнитного захвата 31 заклепка 29 выпадает из отсекателя и занимает положение, показанное на фиг. 5. Таким образом в начале работы полуавтомата первый цикл работы является холость и служит для подачи заклепки в манипулятор. Все последующие циклы являются рабочими. В нижнем положении поддержки 6 манипулятор 26 головной воздействует на Г-образные захваты ловителя. Жесткость захватов меньше жест кости пружины 7, вследствие чего они {расходятся в стороны, заклепки головкой устанавливается в лунку поддержки, после чего захваты возвращаются в исходное положение, надежно удерживая заклепку на поддержке. Поддержка 6 с заклепкой 29 поднимается в рабочую зону. Склепываемые детали надеваются на заклепку и подается команда на клепку.. Через коромысло 3 от силового привода 4 расклепывающий пуансон 2 с обжимкой перемешается в нижнее положение. Упругие упоры 13 входят в контакт с деталями, через них воздействуют на захваты 9 ловителя 8. Вследствие того, что пружина 11 имеет большую жесткость чем суммарная жесткость пружины 7 и захватов 9, захваты 9 расходятся в стороны и, преодолевая сопротивление пружины 7, ловитель опускается. Упоры 13 досылают склепываемые детали до упора с головкой заклепки 29, после этого преодолевая сопротивление пружины 11, обжимка с упорами перемещается относительно пуансона 2 вверх. Пуансон входит в контакт с заклепкой 29, происходит склепывание деталей.
Предлагаемая конструкция полуавтоматического клепального станка позволяет автоматизировать подачу заклепок в зону клепки, повысить качество, надежность и производительность клепальных работ.
Формула изобретения
1. Полуавтоматический клепальный станок, содерчаший смонтированные на станине расклепывающий пуансон с обжимкой, подвижную поддержку с подпружиненными прижк:мсм пакета и ловителем, а также накопитель для заклепок с отсекателем и механизм подачи заклепок, отличающ и и с я тем, что с целью повышения качества клепки и надежности, он снабжен приводньм затвором, кинематически связанным с поддержко1я и с механизмом подачи заклепок,
2.Станок по п. 1, отличающийся тем, что прижим пакета смонтирован на обжимке и выполнен
в виде упругих упоров, а ловитель выполнен в виде подпружиненной охватывающей поддержку втулки с упру0гими Г-образньми захватами.
3.Станок по п. 1, отличают и и с я тем, что механизм подачи заклепок в ловитель выполнен в виде манипулятора с магнитным дер5жателем для заклепок, соединенного через флажок с отсекателем и кинематически связанного с затвором.
4.Станок по п. 1, отлича ющ и и с я тем, что он снабжен мик0ровыключателем, а привод затвора, например силовой цилиндр, снабжен смонтировайньм на заднем торце цилиндра подпружиненньм плунжером, взаимодействующим одним концом с
5 поршнем, а другим через двуплечий рычаг с микровыключателем.
Источники информации, принятые во внимание при экспертизе
0
1. Авторское свидетельство № 253555, кл. В 21 J 15/10, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКИЙ КЛЕПАЛЬНЫЙ СТАНОК | 1969 |
|
SU253555A1 |
| Клепальный станок | 1977 |
|
SU688270A1 |
| Ручной клепальный инструмент | 1983 |
|
SU1136880A1 |
| Клепельный станок | 1979 |
|
SU793690A1 |
| Устройство для клепки | 1985 |
|
SU1297980A1 |
| УСТРОЙСТВО ДЛЯ КЛЕПКИ ПАКЕТОВ | 2008 |
|
RU2387517C2 |
| Станок для клепки тормозных накладок | 1990 |
|
SU1752477A1 |
| Устройство для клепки в труднодоступных местах | 1981 |
|
SU984618A1 |
| Ручной клепальный пресс | 1979 |
|
SU844118A1 |
| Ручной клепальный пресс | 1977 |
|
SU653018A1 |
п
