Изобретение относится к механизам передвижения различных объектов заданным шагом и может быть исполь- овано для подачи проб в системах авоматического анализа биологических бразцов.
Цель изобретения - повышение точности шага каретки.
На фиг. 1 изображено устройство, обилий вид; на фиг. 2 - то же, вид - сбоку.
Устройство шагового перемещения состоит из основания 1, установленных в нем двух направляющих 2 с кареткой 3, которая соединена с Направляющими 2 с помощью опор качения - двух .плавающих подшипников 4 и трех резлюфтовых фиксирующих подшипников 5. Подшипники 5 укреплены на каретке 3 под углом 120. На каретке 3 установлена кассета 6. На основании 1 закреплен привод перемещения каретки (двигатель) 3, передающий через редуктор вращение ходовому винту 7, на котором установлены основная 8 и дополнительная 9 гайки, между которыми расположена пружина 10. Гайки 8 и 9 связаны с кареткой 3 соединительным звеном, которое выполнено в виде двух вилок 11. Один конец каждой из вилок 11 связан с соответствуюп;ей гайкой В и 9, а другой конец шарнирно соединен с кареткой 3.
Фиксатор шага выполнен в виде рас- 35 ляющими, на которых на опорах качеположенного на основании 1 зубчатого колеса 12 с закрепленным на нем магнитом 13, геркона 14, смонтированного на основании 1, и закрепленной на конце ходового винта 7 шестерни 15, входящей в зацепление с зубчатым колесом 12. Геркон 14 установлен с возможностью взаимодействия с магнитом 13.
Устройство работает следующим об- разом.
При включении двигателя постоянного тока начинает вращаться ходовой винт 7, приводящий в движение гайки 8 и 9, которые перемещают каретку 3 по направляющим 2. Одновременно ходовой винт 7 с помощью закрепленной на нем шестерни 15 приводит во вращение зубчатое колесо 12. Укрепленный на колесе 12 магнит 13 совершает вращательное движение и, проходя мимо геркона 14, размыкает цепь питания двигателя,и каретка 3 останавли
5
0
5
0
Бается. Таким образом, осуществляет ся точная фиксация шага. Для выполнения Ьледующего шага автоматически включается питание двигателя от схемы управления (не показана).
Величина одного шага продвижения каретки 3 пропорциональна радиусу зубчатого колеса 12. Таким образом, обеспечивается высокая точность шага каретки 3, которая совершает плавное шаговое перемещение без рывков,толчков и вибраций. Шарнирное соединение гаек 8 и 9 с кареткой 3 компенсирует технологический прогиб винта 7, что повьшдает точность перемещения каретки 3, уменьшая погрешность шага. Связь каретки 3 с направляющими 2 через подшипники 4 и 5 исключает вертикальное перемещение каретки,не предъявляя высоких требований к точности изготовления и сборки направляющих (не требуется дополнительная юстировка направляющих).
Устройство шагового перемещения обеспечивает высокую точность шага, плавность перемещения кассеты с пробами, что весьма важно при выполнении медицинских лабораторных исследований для получения результатов анализа.
Формула изобретения
Устройство шагового перемещения, содержащее основание с двумя направния размещена каретка, привод перемещения каретки с ходовым винтом и установленной на нем гайкой, связанной с кареткой соединительным звеном и фиксатор шага каретки, отличающееся тем, что, с целью повышения точности шага каретки, устройство снабжено установленной на винте дополнительной гайкой и пружиной, расположенной между гайками, причем соединительное звено выполнено в виде двух вилок, один конец каждой из которых связан с соответствующей гайкой, а другой конец шарнирно соедине с кареткой, при этом фиксатор шага каретки вьшолнен в виде зубчатой пары, закрепленной на ходовом винте шестерни и расположенного на основании зубчатого колеса с закрепленным на нем магнитом, и смонтированного на основании геркона, установленного с возможностью взаимодействия с магнитом.
2 5
фиг. 2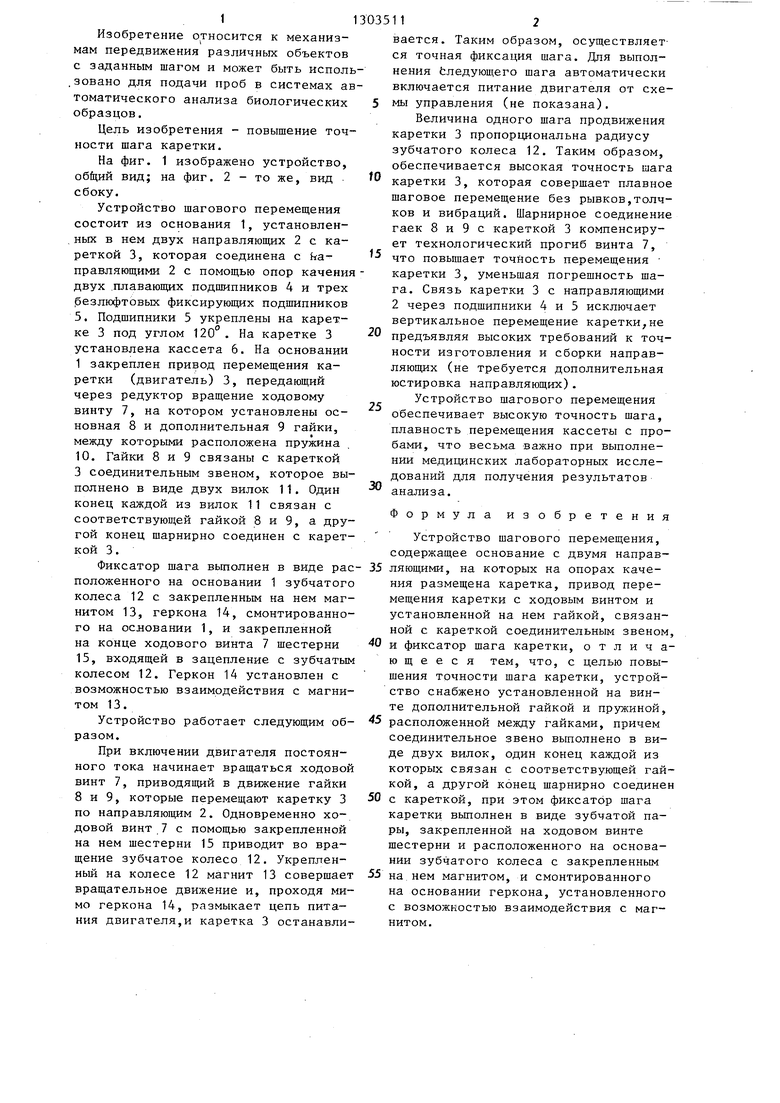
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для контактной точечной сварки | 1982 |
|
SU1055610A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для записи информации на магнитные диски | 1978 |
|
SU733012A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2174628C1 |
| Устройство для перемещения исполнительного органа манипулятора | 1985 |
|
SU1283084A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
| Плансуппортная головка с программным управлением | 1989 |
|
SU1704944A1 |
Изобретение относится к механизмам передвижения различных объектов с заданным шагом, в частности для подачи проб в системах автоматического анализа биологических образцов. Цель - повьшение точности шага каретки (К) 3. В основании 1 установлены две направляющие 2 с К 3, которая соединена с ними с одной стороны с помощью опор качения - двух плавающих подшипников 4, ас другой стороны - трех безлюфтовых фиксирующих подшипников. Последние укреплены на К 3 под углом 120. На основании 1 закреплен привод перемещения К 3 - двигатель, связанный через редуктор с ходовым винтом (ХВ) 7. На нем установлены основная гайка (Г) 8 и дополнительная 9, между которыми расположена пружина 10. При этом Г 8 ;и 9 связаны с К 3 соединительным звеном, вьтолненным в виде двух вилок 11, один конец каждой из которых связан с соответствующей Г 8 и 9, а другой конец - шарнирно с КЗ. На основании 1 расположен фиксатор шага в виде зубчатого колеса 12 с магнитом 13 и взаимодействующего с ним геркона 14. На конце ХВ 7 закрепле- на шестерня 15, входящая в зацепление с колесом 12. При вращении ХВ 7 двигаются Г 8 и 9, перемещающие КЗ. Одновременно ХВ 7 приводит во вращение колесо 12 с магнитом 13. Проходя мимо геркона 14, оно размыкает цепь питания двигателя, и К 3 останавливается. Величина одного шага продвижения К 3 пропорциональна радиусу колеса 12. 2 ил. сл с 00 о 00 сл /5
| Устройство для шаговых перемещений | 1977 |
|
SU611824A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для шаговых перемещений | 1977 |
|
SU719935A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
