(54) АВТООПЕРАТОР ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU733960A1 |
| Вертикальный многошпиндельный станок | 1990 |
|
SU1722701A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| УСТРОЙСТВО для СБОРКИ ШАРИКОВЫХ РУЧЕК | 1970 |
|
SU283857A1 |
| Многопозиционный, многошпиндельный полуавтоматический станок карусельного типа | 1960 |
|
SU139898A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
Изобретение относится к области машиностроения и может быть, в частности, использовано в различных загрузочно-разгрузочных устройствах станков-автоматов.
Известен автооператор, содержащий корпус, двигатель, механическую руку, которая может быть выполнена с двумя клен;евыми захватами и приводом для них, пиноль-рейку, которая совместно с рукой продольно-подвижна относительно корпуса, а рука - поворотно-подвижна относительно пиноль-рейки, кинематические цепи приводов поворота руки и возвратно-поступательного перемещения пиноль-рейки, причем обе цепи кинематически жестко связаны, а в первой из них использован мальтийский механизм 1.
- Недостатком известного устройства является cлo)kнocть выставления относительно взаимного положения трех мальтийских дисков и механизма их фиксации; размещение трех мальтийских дисков в одной плоскости приводит к увеличению радиальных габаритов; отсутствует возможность передачи движения на захваты руки.
Целью предлагаемого изобретения является упрощение конструкции, уменьшение габаритов и повышение кинематической жесткости и точности.
Для достижения указанной цели автооператор снабжен фиксатором, закрепленным жестко на корпусе руки параллельно оси ее вращения, и двухвенцовой щлицевой муфтой, жестко закрепленной на выходном валу привода поворота руки, причем на корпусе руки и на входном валу привода поворота руки выполнены шлицы, ответные соответственно первому и второму полувенцам муфты, а кинематическая цепь возвратно-поступательного перемещения пинольрейки снабжена торцовым кулачком с качающимся толкателем.
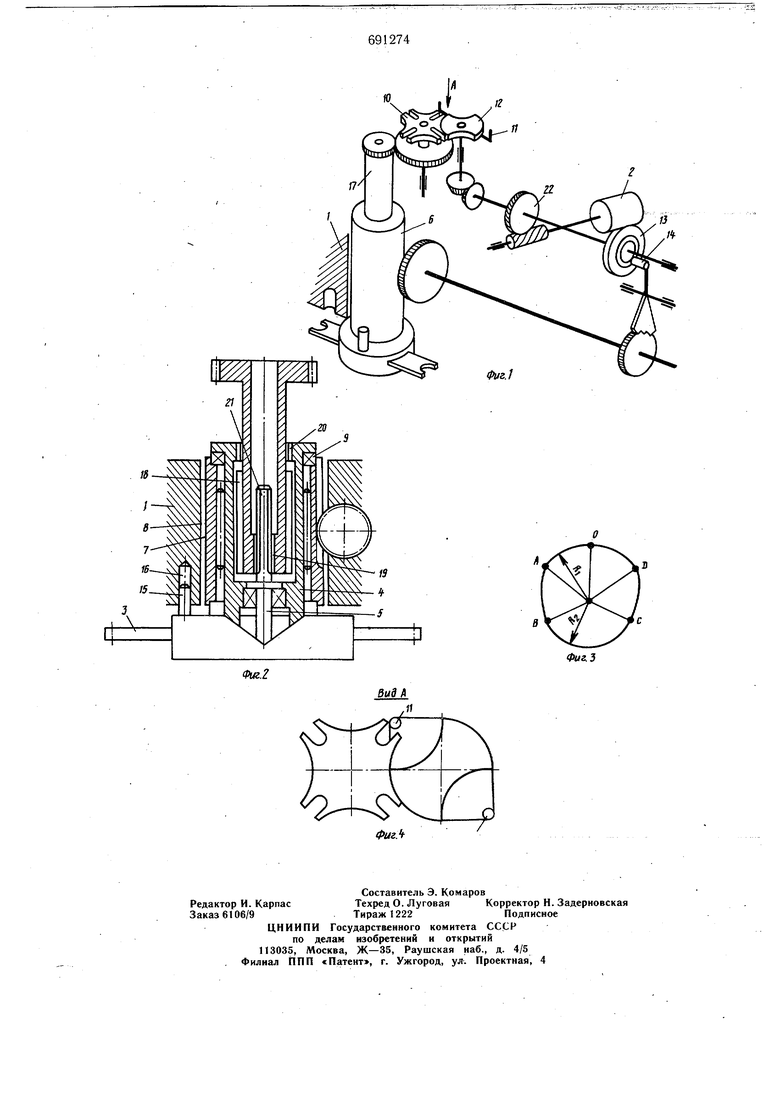
На фиг. 1 представлена кинематическая схема автооператора; на фиг. 2 показана взаимосвязь конечных звеньев кинематических цепей с исполнительным органом автооператора; на фиг. 3 - рабочий профиль торцового кулачка, на фиг. 4 - вид по стрелке А на фиг. 1. Автооператор содержит корпус 1, двигатель 2, механическую руку с двумя захватами 3, корпусом 4 и приводом захватов с входным валом 5, пиноль-рейку 6 с направляющими поступательного перемещения 7. В корпусе 1 выполнены направляющие 8, ответные направляющим 7 пинольрейки 6. Корпус 4 руки установлен поворотно-подвижно на подшипниках 9 в пиноль-рейке 6. Кинематическая цепь привода поворота руки содержит мальтийский механизм, состоящий из диска 10, водила 11, совмещенного с замком 12. Кинематическая цепь возвратно-поступательного пере; мещения пиноль-рейки 6 содержит торцевой кулачок 13 с качающимся толкателем 14 и промежуточные зубчатые передачи. На корпусе4 руки жестко закреплен фиксатор 15, а в корпусе 1 выполнено отверстие 16 ответное фиксатору 15. На выходном валу 17 привода поворота руки раз.мещена щлицевая полумуфта с венцами 18 и 19. На корпусе 4 руки выполнены щлицы 20, ответные шлицевым венцам 18, а на входном валу 5 привода захватов выполнены щлицы 21, ответные шлицевым венцам 19. На торцевом кулачке 13 (см. фиг. 3) точка О - исходное положение на дуге постоянного радиуса R|, АВ - дуга угла подъема качающегося толкателя 14, BG - дуга выстоя на радиусе Ri., CD - дуга угла опускания толкателя 14, - возврат в исходное положение. Автооператор работает следующим образом. В исходном положении толкатель 14 размещен в точке О торцевого кулачка 13, а водило 11 стоит на входе в паз диска 10, фиксатор 15 введен в отверстие 16 корпуса 1, а щлицевой венец 19 полу муфты находится в зацеплении со шлицами 21 входного вала 5 привода захватов - рука автооператора находится в верхнем положении, захваты задвинуты в корпус 4 руки. От двигателя 2 движение по общему участку кинематической цепи передается до червячного колеса 22 и далее разветвляется:а)в цепи привода возвратно-поступательного перемещения пиноль-рейки 6 качающийся толкатель 14 перемещается по дуге постоянного радиуса ОА торцевого кулачка 13 - перемещения на пиноль-рейке нет; б)в цепи привода поворота руки водило 11 входит в паз диска 10 и осуществляет поворот через вал 17, венец 19 щлицевой полумуфты и шлицы 21 входного вала 5 привода захватов 3 - захваты выдвигаются. Далее при подходе толкателя 16 к точке А торцевого кулачка 13 водило 11 выходит из паза диска 10 и последний встает на замок 12, При переходе толкателя 14 на дугу АВ торцевого кулачка 13 начинается совместное опускание руки и пинольрейки 6 по направляющим 8 корпуса 1. Фиксатор. 15 и щлицы 21 вала 5 вьгходят из зацепления с отверстием 16 и венцом 19 соответственно, а щлицы 20 на корпусе 4 руки входят в зацепление с венцом 18 щлицевой полумуфты. Опускание заканчивается в точке В торцевого кулачка 13 и толкатель 14 выходит на дугу ВС постоянного радиуса Rt. Мальтийский механизм начинает передавать вращение на вал 17 и через венец 18 щлицевой полумуфты, венец 20 - на корпус 4 руки автооператора, и происходит поворот руки на 180°. После поворота руки толкатель 14 перемещается на дугу CD и начинает подниматься пиноль-рейка 6 с рукой в верхнее положение, а мальтийский механизм запирается замком 12. В точке 0 подъем пиноль-рейки 6 с рукой закончен, фиксатор 15 входит в отверстие 16 корпуса 1, венцы 18 и 20 размыкаются. а венец 19 и шлицы 21 замыкаются. Водило 11 передает вращение через диск 10 на вал 17 и далее на привод захватов 3, которые задвигаются в -корпус 4 руки. Автооператор встает в исходное положение - точка О на торцевом кулачке 13. Далее цикл работы повторяется. Формула изобретения Автооператор для металлорежущих станков, содержащий корпус, пиноль-рейку продольно-подвижную относительно корпуса, механическую руку с двумя клещевыми захватами и приводы поворота руки и возвратно-поступательного перемещения пиноль-рейки, кинематически связанные между собой, отличающийся тем, что, с целью упрощения конструкции, уменьщения габаритов и повышения кинематической жесткости и точности, автооператор снабжен фиксатором, жестко закрепленным на корпусе фуки параллельно оси ее вращения, и двухвенцовой щлицевой полумуфтой, жестко закрепленной на выходном валу привода поворота руки, причем на корпусе руки и на входном валу привода поворота руки выполнены щлицы, ответные соответственно первому И второму полувенцам муфты, а кинематическая цепь возвратно-поступательного перемещения пиноль-рейки снабжена торцевым кулачком с качающимся толкателем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 474426, кл. В 23 Q 7/04, 1972.
