. -1 . Изобретение относится к складскому хозяйству, в частности к проходным стеллажам.
Известен стеллаж проходаой автоматизированный, содержащий горизонтальные направляющие с позициями загрузки, разгрузки и хранения грузов, на которых установлена приводная тележка, снабженная гpyзoпoдъe шым механизмом, и средства управления тележкой 11|,С23.
Однако этот стеллаж опасно использовать в пожаро- и взрывоопасных помещениях из-за троллейного питания, подводимого к тележке.
Целью изобретения является обеспечение работы стеллажа в пожаро- и взрывоопаснь1Х помещениях.
Это достигается тем, что средства для управления тележкой содержат установленные на направляющих на каждой позиции хранения подвижные в вертикальной плоскости копиры, концевые упоры, расположенные на направляющих на позициях загрузки и разгрузки, и установленный на тележке вьщвижной вертикальный шток, один конец которого снабжен горизонтальным пальцем, взаимодейств)аощим с копирами при загрузке и разгрузке тележки, для
включения ее грузоподъемного механизма и с концевыми упорами для вывода Пальца из взаимодействия с копирами, а привод тележки
, содержит гибкий орган, связанный с приводной лебедкой, установленной на стеллаже.
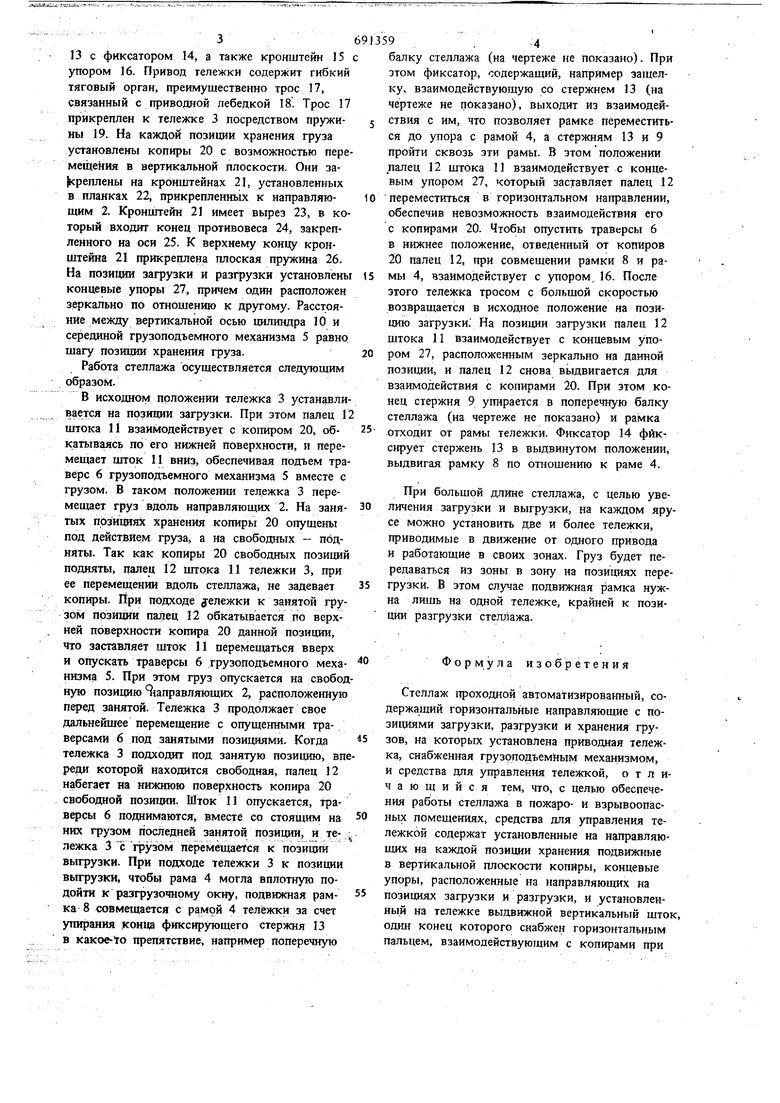
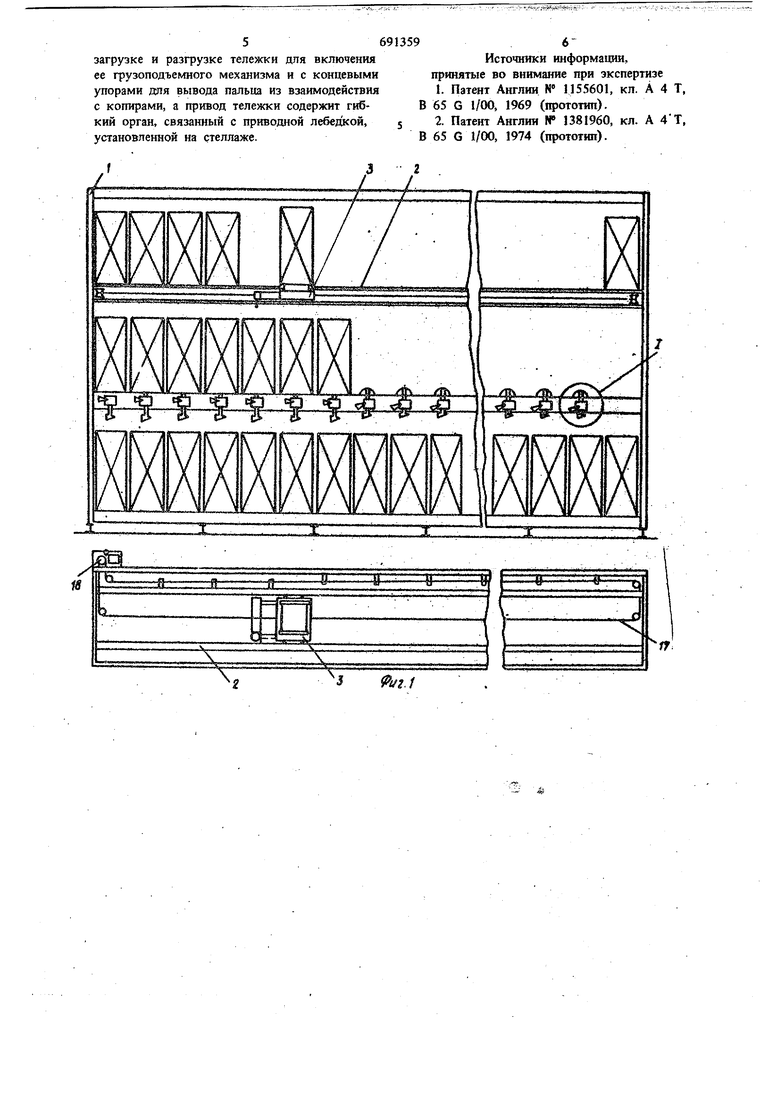
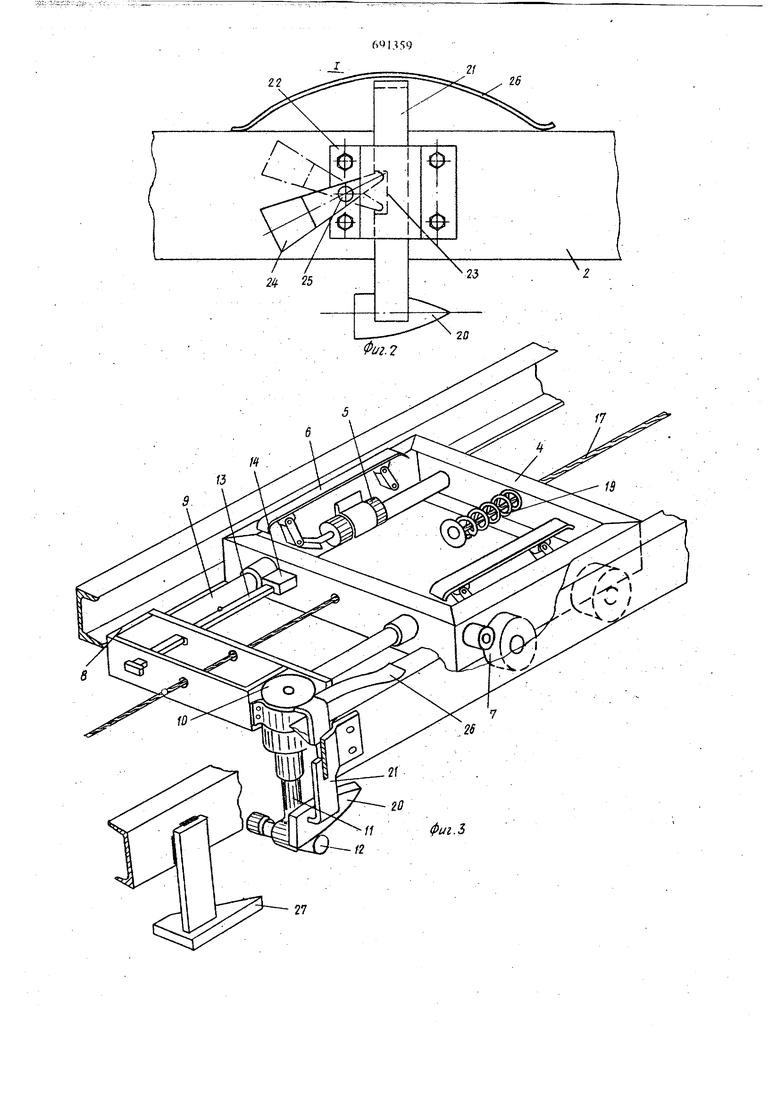
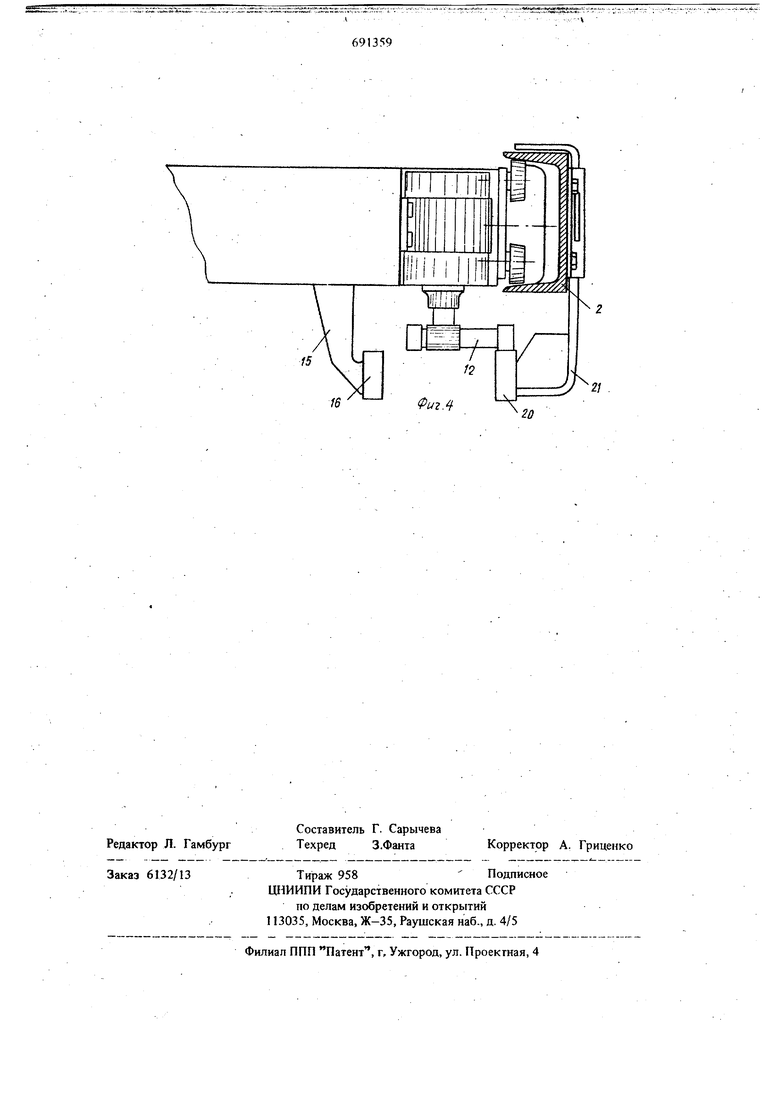
На фиг. Л показан стеллаж с грузом н тележкой, общий вид; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 - тележка с грузоподъемным механизмом; на фиг. 4 - поперечный разрез тележки.
Стеллаж содержит каркас 1 с горизонтальными направляющими 2 и позициями загрузки, разгрузки и хранения груза. В направляющих 2 подвижно установлена тележка 3, снабженная установленным на раме 4 грузоподъем5ным механизмом 5 с траверсами 6, опорными колесами 7 и подвижной рамкой 8 с направляющими цилиндрическими стержнями 9. На рамке 8 закреплен вьщвижной гидравлический цилиндр 10, связанный с грузоподъемным механизмом 5. Ш линдр 10 снабжен щтоком 11, на конце которого закреплен палец 12 с возможностью перемещения в горизонтальi ной плоскости. На рамке 8 закреплен стержень
13 с фиксатором 14, a также кронштейн 15 упором 16. Привод тележки содержит гибкий тяговый орган, преимущественно трос 17, связанный с приводной лебедкой 18. Трос 17 прикреплен к тележке 3 посредством пруживы 19. На каждой позиции хранения груза установлены копиры 20 с возможностью перемещения в вертикальной плоскости. Они за креплены на кронштейнах 21, установленных в планках 22, прикрепленных к направляющим 2. Кронштейн 21 имеет вырез 23, в который входит конец противовеса 24, закрепленного на оси 25. К верхнему концу кронштейна 21 прикреплена плоская пружина 26. На позищш загрузки и разгрузки установлены концевые упоры 27, причем один расположен зеркально по отношению к другому. Расстояние между вертикальной осью цилиндра 10 и серединой грузоподъемного механизма 5 равно шагу позиции хранения груза.
Работа стеллажа осуществляется следующим образом.
В исходном положении тел(5жка 3 устанавливается на позиции загрузки. При этом палец 12 штока И взаимодействует с копиром 20, обкатываясь по его нижней поверхности, и перемещает шток 11 вниз, обеспечивая подъем траверс 6 грузоподъемного механизма 5 вместе с грузом. В таком положении тележка 3 перемешает груз вдоль направляющих 2. На занятых позициях хранения копиры 20 опушены под действием груза, а на свободных - подняты. Так как копиры 20 свободных позиций подняты, палец 12 штока 11 тележки 3, при ее перемещении вдоль стеллажа, не задевает копиры. При подходе дележки к занятой грузом прзиида палец 12 обкатывается по верхней поверхности копира 20 данной позиции, что заставляет шток 11 перемещаться вверх и опускать траверсы 6 грузоподъемного механизма 5. При этом груз опускается на свободную позицию 9{аправляющих 2, расположенную перед занятой. Тележка 3 продолжает свое дальнейшее перемещение с опущенными траверсами б под занятыми позициями. Когда тележка 3 подходит под занятую позицию, впреди которой находится свободная, палец 12 набегает на нижнюю поверхность копира 20 свободной позищш. Шток П опускается, травфсы 6 поднимаются, вместе со стоящим на них грузом последней занятой позиции, и тележка 3 с грузом перемёш 1ется к позищш выгрузки. При подходе тележки 3 к позиции вьп-рузки, чтобы рама 4 могла вплотную подойти к разгрузочному окну, подвижная рамка- 8 совмещается с рамой 4 тележки за счет упирания конца фиксирующего стержня 13 в какое-to препятствие, например поперечную
балку стеллажа (на чертеже не показано). При этом фиксатор, содержащий, например защелку, взаимодействующую со стержнем 13 (на чертеже не показано), выходит иэ взаимодействия с им, что позволяет рамке переместиться до упора с рамой 4, а стержням 13 и 9 пройти сквозь зти рамы. В этом положении палец 12 штока 11 взаимодействует с концевым упором 27, который заставляет палец 12 переместиться в горизонтальном направлении, обеспечив невозможность взаимодействия его с копирами 20. Чтобы опустить траверсы 6 в нижнее положение, отведенный от копиров 20 палец 12, при совмещении рамки 8 и рамы 4, взаимодействует с упором. 16. После этого тележка тросом с большой скоростью возвращается в исходное положение на позицию загрузки. На позиции загрузки палец 12 штока 11 взаимодействует с концевым упором 27, расположенным зеркально на данной позиции, и палец 12 снова выдвигается для взаимодействия с копирами 20. При этом конец стержня 9 ушфается в поперечную балку стеллажа (на чертеже не показано) и рамка отходит от рамы тележки. Фиксатор 14 фиксирует стержень 13 в вьщвинутом положении, вьщвигая рамку 8 по отношению к раме 4.
При большой длине стеллажа, с целью увеличения загрузки и выгрузки, на каждом ярусе можно установить две и более тележки, приводимь е в движение от одного привода и работающие в своих зонах. Груз будет передаваться из зоны в зону на позициях перегрузки. В этом случае подвижная рамка нужна лишь на одной тележке, крайней к позиции разгрузки стеллажа.
Формула изобретения
Стеллаж проходной автоматизированный, содержащий горизонтальные направляющие с позициями загрузки, разгрузки и хранения грузов, на которых установлена приводная тележка, снабженная грузоподъемным механизмом, и средства для управления тележкой, отличающийся тем, что, с целью обеспечения работы стеллажа в пожаро- и взрывоопасных помещениях, средства для управления тележкой содержат установленные на напр;авляющих на каждой позиции хранения подвижные в вертикальной плоскости копиры, концевые упоры, расположенные на направляющих на позициях загрузки и разгрузки, и установленный на тележке выдвижной вертикальный што конец которого снабжен горизонтальным пальцем, взаимодействующим с копирами при
загрузке и разгрузке тележки для включения ее грузоподъемного механизма и с концевыми упорами для вывода палыт из взаимодействия с копирами, а привод тележки содержит гибкий орган, связанный с приводной лебедкой, установленной на стеллаже.
Источники информации, принятые во внимание при экспертизе
1.Патент Англии N 1155601, кп. А 4 Т, В 65 G 1/00, 1969 (щ)ототип).
2.Патент Англии № 1381960, кл. А 4Т, В 65 G 1/00, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| Горизонтально-замкнутый тележечный конвейер | 1980 |
|
SU984949A1 |
| ПОДЪЕМНИК | 1991 |
|
RU2006451C1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для загрузки и разгрузки многоярусных полочных стеллажей | 1980 |
|
SU908669A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
,
J i/г. 1
