(54) ДАТЧИК МЕСТОНАХОЖДЕНИЯ УТЛЕЙОБЫБАЮЩЕЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик местонахождения угледобывающей машины | 1973 |
|
SU465475A1 |
| ДАТЧИК УГЛА ПОВОРОТА И НАПРАВЛЕНИЯ ВРАЩЕНИЯ | 1969 |
|
SU241262A1 |
| Коммутирующее устройство реле времени | 1972 |
|
SU478373A1 |
| Коммутатор | 1973 |
|
SU515179A1 |
| Коммутатор на магнитоуправляемых контактах | 1976 |
|
SU736206A1 |
| Пневматическое устройство для телепередачи угла поворота вала | 1977 |
|
SU634340A2 |
| Установка для исследования и ускоренныхиСпыТАНий узлОВ СЕльСКОХОзяйСТВЕННыХ МАшиН,пРЕиМущЕСТВЕННО пРОРЕжиВАТЕлЕй C МЕХАНи-чЕСКиМ РАбОчиМ ОРгАНОМ | 1979 |
|
SU836551A1 |
| Устройство для определения местонахождения выемочной машины | 1975 |
|
SU602680A1 |
| Роторная машина для прессования изделий из порошкообразных материалов | 1980 |
|
SU961271A2 |
| Датчик угла наклона,например,для контроля положения механизированной крепи | 1986 |
|
SU1416688A2 |
-.-.-.. . - . Изобретение относится к элементам автоматизированных систем контроля к учета работы очкстнь1х забоев для полу- чёния информашш о местонахождении угл добывающих машин. Известен датчик угла поворота и направления вращения, используемый для контроля местонахождения угледобывающей машины, содержащий квантованный диск, постоянные магнить и магнитоуправляемые контакты и распознаватель направления перемещения, фрикционно связанщлй с квантованным диске i, Этот датчик Не обеспечивает необходимую точность контроля местонахождения угледобывающей машины. Известен также датчик местонахождения угледобывающей машины, который имеет магвитоуправляемые контакты, зак реплённые в корпусе датчика, постоянные Jиaгни1rы, закретйюнные в роторе и вэаимо , действзпощие с распознавателем направ)тения перемещения, вал с винтовой нареэ кой и регулируа «ые стопоры 2}. Этот датчик имее;т низкую надежность работы, так как требуется периодическая замена магнитоуправляемого контакта, контролирующего угол поворота ведущего колеса механизма подачи. Этот контакт срабатывает значительно чаще, чем магнитоуправляемь1й контакт распознавателя направления перемещения, в результате чего его ресурс по количеству срабатываний используется быстрее, чем контакт распознавателя направления перемещения. -Для замены этого магнитоуправпяемого контакта требуется демонтаж датчика в шахтньпс условиях, что связано с определенными трудозатратами и приводит к перебояоу в получении информации. Цель изобретения - повыщение надежности датчика.. Это достигается тем, что корпус дагчика имеет упор для взаимодействия с распознавателем направления перемешв шш, причем последний выполнен в виде цилиндра с продольными вырезами на его. битовой поверхности, количество которых
равно числу одновременно работающих магнитоуправпяемых контактов.
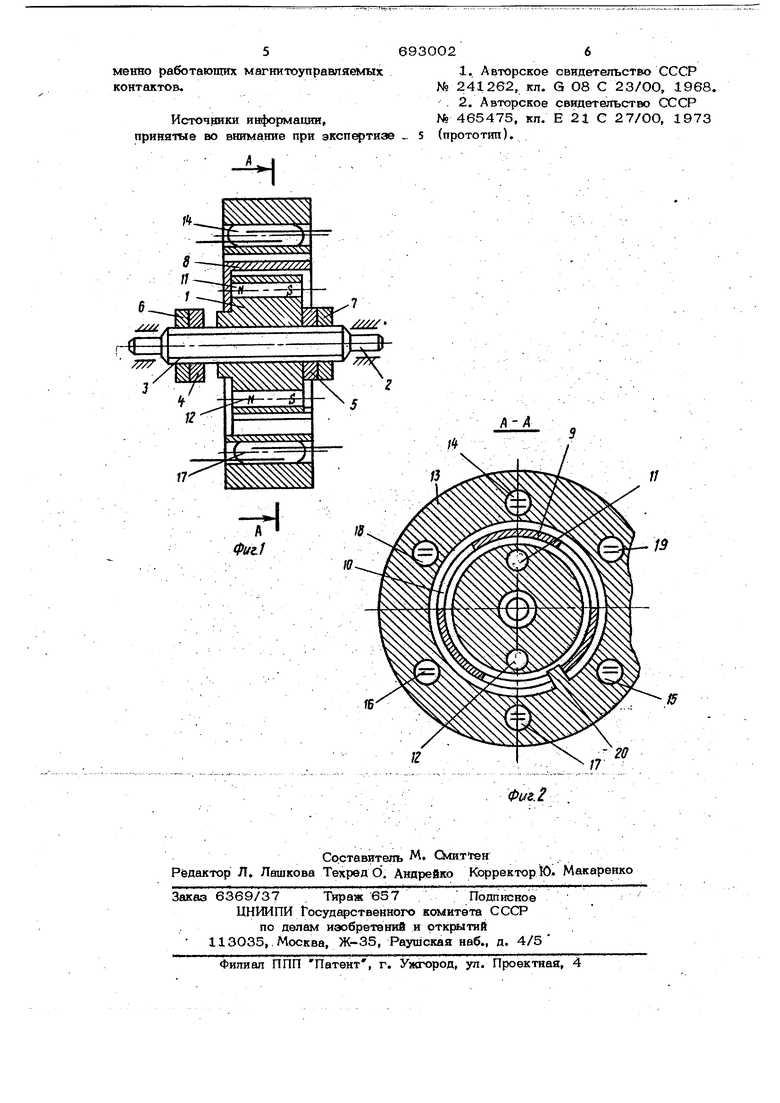
Не фиг, 1 изображен датчик местона хождения угледобывающей машины, продопъный разрез; на фиг. 2 - то же, по- j веречвыв разрез.
Датчик- имеет ротор 1, разметен яый на валу 2 и связанный с ним при помощи резьбового соединения 3. На валу 2 име1отся два регулируемых стопора ю 4 и 5, ограничивающие с двух сторон перемещение ротора 1 вдоль вала 2. Стопоры 4 и 5 закреплены на валу 2 гайками 6 и 7..На валу 2 соосно ротору 1 р сположен распознаватель 8 йапр авле- 15 ния перемещения, выполненный в виде ни пивдра, в боковой поверхности 9 которого вмполвеиы й|)одольные вырезы io, При. чём Iугловая ширикй вырезов равна; половине ш(эга между ними. Распознаватель 20 8 направления йеремешения расположен с1вс6одно на роторе 1 и основанием прикреплен к нему при помощи магнитов 11 и 12, вмонтированных в диаметрально противоположных точках ротора 1.25
Распознаватель 8 направления перемепвэний с ротором 1 помещен в корпус 13, выполненный в виде толстостенного цитгандра,п боковую поверхность которого по диаметру Лвмонтированы две группы магни-ЗО тоуправляемых контактов 14-19. Причем как контакты 14-1 б, так и контакты 1719 срешшены между собой параллельно.
На ёнУтреннеЛ стороне кО|эпуса ЕЫПОЛнен упор 20, входит в один из 35 выре0рв 10 в боковой поверхности 9 р спОЭ1Вавателя направления перемещения и ограничивает угловое перемещение распознЕшателя направления перемещения.
Количество продольных иарезов равно числу одновременно работающих магнитоупраеетяекшх контактов. Минимальное чисaip koHTaKtOB в каждой группе может быть равным 1.Датчил работает следующим образом. Прв вращении вала 2 по часовой стрелке (ciM. фиг. 2) распознаватель направления перемещения застопорен упором 20, в результате четч вырезы 10 боковой поверхности 9 иилиндра остаются напротив контактов 17-19. Ротор 1 вращается .вместе с валом 2, магнит 11 и 12 воз- , дэйствук)Т поочередно на контакты 17-19, которые периодически замыка(отся (размы- ). Каждое замыкание (размыкание) лгобого из ковгтактрв 17-19 соответствует перемещению машины на определенное расстояние в направлении, при котором
ведущее колесо механизма подачи машины, соединенное с валом 2 датчика, вращается по часрв |Ой стрелке. Контакты 14- 16 при этом постоягано остаются в р азомкнутом состоянии.
При изменении направления вращения вала 2 и выборе слабины упруго хэ органа, распознаватель направления перемепения поворачивается и стопорится упором 20. Е5ырёзы 10 боковой поверхности 9 цилиндра располагаются при этом напротив контактов 14-16, Ротор 1 перемейтается вдоль вала 2 по резьбе 3 до стопора 4. При достижении стопора 4 ротор 1 начинает вращаться. Контакты 14-16 под воздействием магнитов 11 и 12 периодаЧескИ; замыкаются (размыкаются). Каждое замыкание (размыкание) контактрв 14-16 соответствует перемещению машины на определенное расс-гояние в направлений, при котором ведущее колесо механизма подачи машины, соединенное с валом 2 датчика, вращается против часовой стрелки. Контакты 17-19 при atOM постоянно остаются в разомкнутом состоянии.
Подсчет количества замыканий контактов 14-16 и 17-19, например с помощью реверсивного счетчика, дает сведения о к1е Гтонахождении машин| 1 в лаве.
Так как каждая группа контактов 14-16 и 17-19 срабатывает трлько при перемещении машины в одном направлении то их можно подключить непосредственно на Входы, например реверсивного счетчика, без применения дополнительных логических схем.
Ф р р м у л а изобретения
Датчик местонахождения угледобывакк щей машины, имеющий магнитоуправляеМые KOHtaKiu, закрепленные в корпусе датчика, пЬстоянные магниты, закрепленные в роторе и взаимодействующие с распознавателем направления перемещения, вал с М1нтЧ)воЙ Нарезкой и регулируемые jCTonopM, отличающийс я тем, что, с целью повышения надежности, корпус датчика имеет упор для взаимодействия с распознавателем напраситения перемещения, причем последний выполнен в виде цилиндра с продольными вырезами по его боковой поверхности, количество которых равно числу одновре56930026
менйо работающих магнитоуправляй шх1. Авторское свидетельство СССР
контактов.№241262, кл. G 08 С 23/00, 1968.
Источники иш|юрмации,№ 465475, кп, Е 21 С 27/ОО, 1973
принятые во внимание при экспертизе - 5 (прототип).
N:vsx 4.44SJsSS SsxS
.2. Авторское свидетельство СССР
