1
Изобретение относится к области трубогибочного производства, в частности к конструкциям машин для гибки труб с их индукционным нагревом и осевым сжатием.
Известны машины для гибки труб, содержащие станину с расположенными на ней иажимиьш механизмом с кареткой и гибочным механизмом с их приводами и нагревательным устройством. Усилие осадки трубы, возникающее нри изгибе в очаге деформации, и реактивное усилие от торможе}И1Я нередаются неиосредственно на привод,1 нажимного и гибочного механизмов, мошность которых целиком зависит от величины этих усилий.
Увеличение размеров изгибаемых труб приводит к увеличению габаритов и мощности ириводов, что в конечном итоге повышает вес и стоимость машины.
Целью изобретения является снижение усилий, действующих на привод, и уменьшение веса и стоимости машины.
Для этого предлагаемая машина для гибки труб снабжена установленными на валу гибочного механизма дисками, выполненными с радиусом кривизиы рабочей поверхности, большим требуемого радиуса изгиба трубы, и соединенными посредством тяг с кареткой нажимного механизма.
С целью возможности регулирования величины осевого сжатия поверхность дисков образована сменными секторными вставками с различными по величине радиусами кривизны.
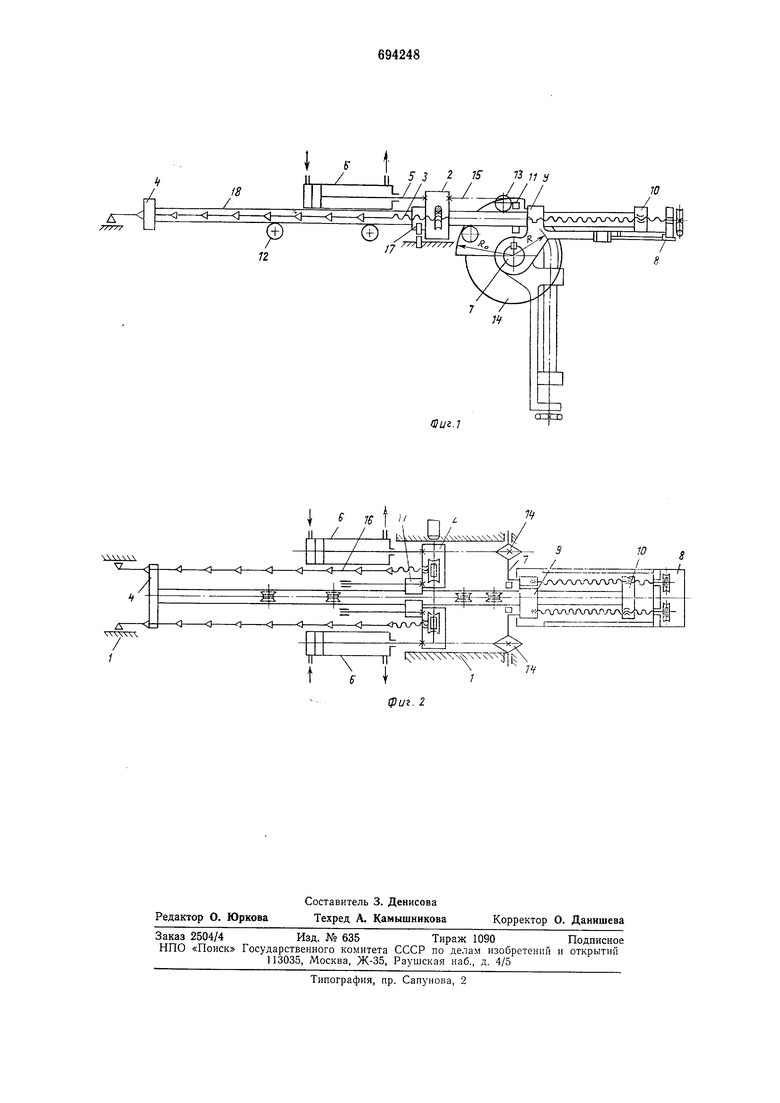
На фиг. 1 дана иринцнниальная схема .мапшны, вид сбоку; на фиг. 2 - то же, план.
На станине 1 установлена каретка 2 нажимного механизма машины, которая через винты 3 соединяется с толкателем 4. Посредством штоков 5 гидроцнлиндров 6 каретка может перемещаться по направляющим станины. В головной части станины на двухоиорном горизонтальном валу 7 смонтирован кронштейи 8 гибочного механизма, несущий зажим 9 и передвижной унор 10. Па станине 1 машииы закреплены нагревательный индуктор 11, направляющие 12 и опорно-приводные 13 ролики. На обоих концах вала 7 гибочного механизма смонтированы диски 14, имеющие радиус Ло кривизны рабочей поверхности, больший радиуса R 1згиба трубы. Диски посредством тяг 15, выполненных, например, в виде цени, жестко соединены с кареткой 2 нажимиого механизма.
К каретке кренятся направляющие 16, на которых иодвижно установлен зажим 17, предназначенный для выталкивания согнутой трубы из машины.
Работа машины осуществляется следующим образом.
Труба 18 укладывается на опорные ролики i6 и при вращении их подается в зону гибки через разжатый зажим 17, проем в каретке 2, направляющие ролики 12, индуктор И II зажим 9 на заданную величину.
После этого устанавливается толкатель 4 и закрываетея зажнм 9. Включается нагрев и о.хлаждение трубы. По истечении заданного времени ирогрева автоматически поередством прпвода и винтов 3 начинается движение толкателя 4 внеред, который, упираяеь в торец трубы, неремещает ее через включенный иидуктор 11. В момент соирикосновеиия трубы с упором 10 запирается зажим 9, стопорятся винты 3 и подается давление в левую нолость гидроцилиидров 6. Каретка 2 под действием щтоков 5 начинает движенне вперед и посредством толкателя 4 перемещает трубу через индуктор 11 е прежней скоростью.
Одновременно с этим поворачивается кронштейн 8 и вал 7 гибочного механизма, осуществляя изгиб трубы в нагретой зоне.
Вследствие того что величина радиуса Ко кривизны рабочей поверхности дисков 14 больше радиуса R изгиба трубы, линейная скорость иеремещенпя тяг 15 ири гибке должна быть выгие, чем линейная скорость иеремещения трубы.
Однако благодаря наличию жееткой кинематической связи между дисками 14 вала 7 гибочного механизма и кареткой 2 нажимного механизма эти скорости принудительно будут выравнены, вследствие чего в очаге деформации появится осевое сжимающее уеилие, которое осаживает трубу. При гибке в тягах 15 возникает также уеилие натялсения, которое существенно снижает величину усилия, развивае.мого гидроцилиидрами 6 привода мащины, поскольку оба yciiviiiii действуют в одном наиравлеНИИ.
По окончании процесса гибки трубы останавливается кронштейн 8, выключается нагрев, сбрасывается давление в гидроцилиндрах 6.
Затем отводится толкатель 4 и упор 10, выключаетея охлаждение трубы и раскрывается зажим 9. Одновременно с этим труба захватывается зажимом 17 и при перемещении его вперед выталкивается из маипшы.
Регулировка степени осадки трубы в
предлагаемой .мащине может быть достигнута за счет изменения величины радиуса , которое оеуществляется, например, иутем применения дисков 14 со сменными секторными вставками, выполнеииыми с
различиыми но величине радиуса кривизны рабочей новерхности.
Для неравномерной осадки трубы в ироцессе гибки секторные вставки дисков 14 могут быть изготовлены с переменным радиуеом кривизны, соответствующим заданной программе изменения осадки.
Формула изобретения
1.Мащина для гибки труб с их одиовремениым ипдукциоииым нагревом и осевым сжатием, содержащая станину с расноложенными на ней нажимным механизмом с
кареткой и гибочным механизмом, евязаниыми с нриводом машины, и нагревательным устройством, отличающаяся тем, что, с целью снижения усилий, действующих на нривод, а уменьшения веса
машины, она снабжена установленными на валу гибочного механизма дисками, выиолненными с радиусом кривизны рабочей поверхности, большим требуемого радиуса изгиба трубы, и соедииенными иосредством
тяг с кареткой иал имного механизма.
2.Машина по и. 1, от л и ч а ющ а я е я тем, что, с целью воз.можиости регулирования величины осевого сжатия, поверхность дисков образована сменными секторными
ветавками е переменными ио величине радиусами кривизны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для гибки труб | 1973 |
|
SU904839A1 |
| Машина для гибки труб с осевым сжатием и локальным нагревом | 1976 |
|
SU740341A1 |
| Трубогибочный станок с индукционным нагревом | 1976 |
|
SU676354A2 |
| Трубогибочный станок с индукционным нагревом | 1973 |
|
SU440183A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ПРЕДВАРИТЕЛЬНО ОРЕБРЕННЫХ ПРЯМЫХ ТРУБ | 2000 |
|
RU2190817C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЗМЕЕВИКОВОГО ЭЛЕМЕНТА С U-ОБРАЗНЫМИ КОЛЕНАМИ ЗАДАННОЙ КРИВИЗНЫ ГИБКОЙ МОНОМЕТАЛЛИЧЕСКИХ ИЛИ БИМЕТАЛЛИЧЕСКИХ ОРЕБРЕННЫХ ТРУБ | 2006 |
|
RU2381859C2 |
| Головка гибочная трубогибочного станка | 1978 |
|
SU772648A1 |
| Способ гибки труб и станок для осуществления способа | 2018 |
|
RU2713899C2 |
| Трубогибочный станок | 1956 |
|
SU110447A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
I f / 7f t / П /II Кч1чхлчУх/ хУ
