(54) АМОРТИЗЛТО
| название | год | авторы | номер документа |
|---|---|---|---|
| Амортизатор | 1977 |
|
SU932002A2 |
| Амортизатор | 1979 |
|
SU781445A1 |
| Амортизатор | 1978 |
|
SU881430A2 |
| Амортизатор | 1980 |
|
SU937816A1 |
| Амортизатор | 1974 |
|
SU507724A1 |
| Амортизатор | 1978 |
|
SU748061A2 |
| Амортизатор | 1976 |
|
SU600344A2 |
| Амортизатор | 1988 |
|
SU1573255A2 |
| Амортизатор | 1977 |
|
SU889962A2 |
| Амортизатор | 1975 |
|
SU679746A1 |
Изобретение относится к промышлен ности средств связи и может быть использовано для защиты радиоэлектронной (РЭА) и телевизионной аппаратуры от действия вибрации ,и ударов при на личии линейных перегрузок со стороны носителей преимущественно авиационного и подвижного транспорта. Для защиты РЭА от внешних дин амических воздействий широко применяются стандартные амо:ртизаторы с линейной и нелинейной непрерывно возрастающей силовой характеристикбй. Известны амортизаторы, содержащие корпус, внутри которого размещен шток, связанный одним концом с амортизируемым объектом, а другим - с винтовой пружиной, являющейся основным упругим элементом, и дополнительным упругим элементом Недостатком указанных амортизаторов является то, что в условиях эксплуатации амортизаторов, размещённых на любом подвижном носителе, имеют место линейные перегрузки, связанные с разгоном и торможением, качкой, эволюцией носителя на траектории дви жения. В этом случае зазор между дополнительным упругим элементом и корпусом выбирается при незначитель ной величине линейной перегрузки и виброизоляция существенно ухудшается. Наиболее близким к описываемому амортизатору по технической сущности является амортизапйр, содержащий корпус, размещённйё;. в нем связываемый с амортизируемым объектом шток с поршнем, разрезную кольцевую ось и упругие пружинные элементы, установленные на разрезной оси 2. Недостаток данного амортизатора заключается в недостаточной энергоемкости, больших габаритах амортизатора и в сложной технологии изготовления пружин, входящнх в амортизатор. Цель изобретения - повышение энергоемкости амортизатора. Указанная цель достигается тем, что амортизатор снабжен шайбой, размещенной в нижней части корпуса, взаимодействующей с упругими элементами, установленными с возможностью перемещения вдоль оси Корпуса, упорами, выполненными в верхней части корпуса на разных уровнях относительно оси последнего, и гибкой связью, связывающей шток с шайбой. Кроме того, гибкая связь выполнена в виде концентрично расположенных
наружного гибкого и внутреннего колец. ,
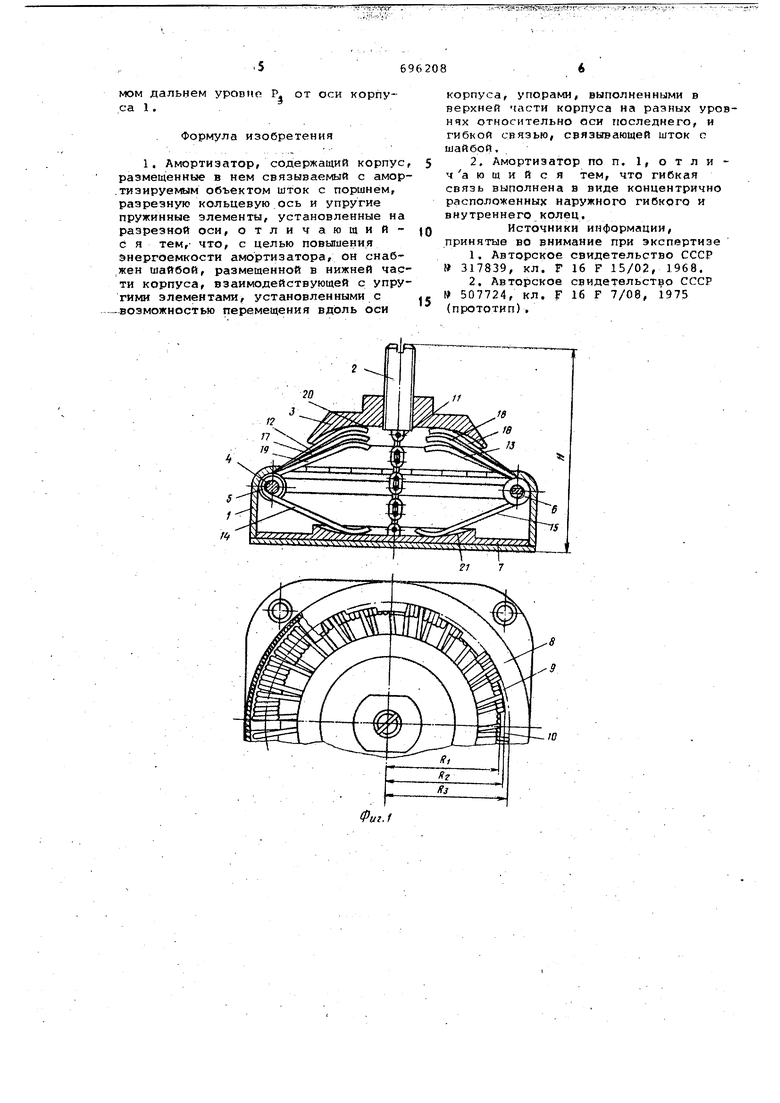
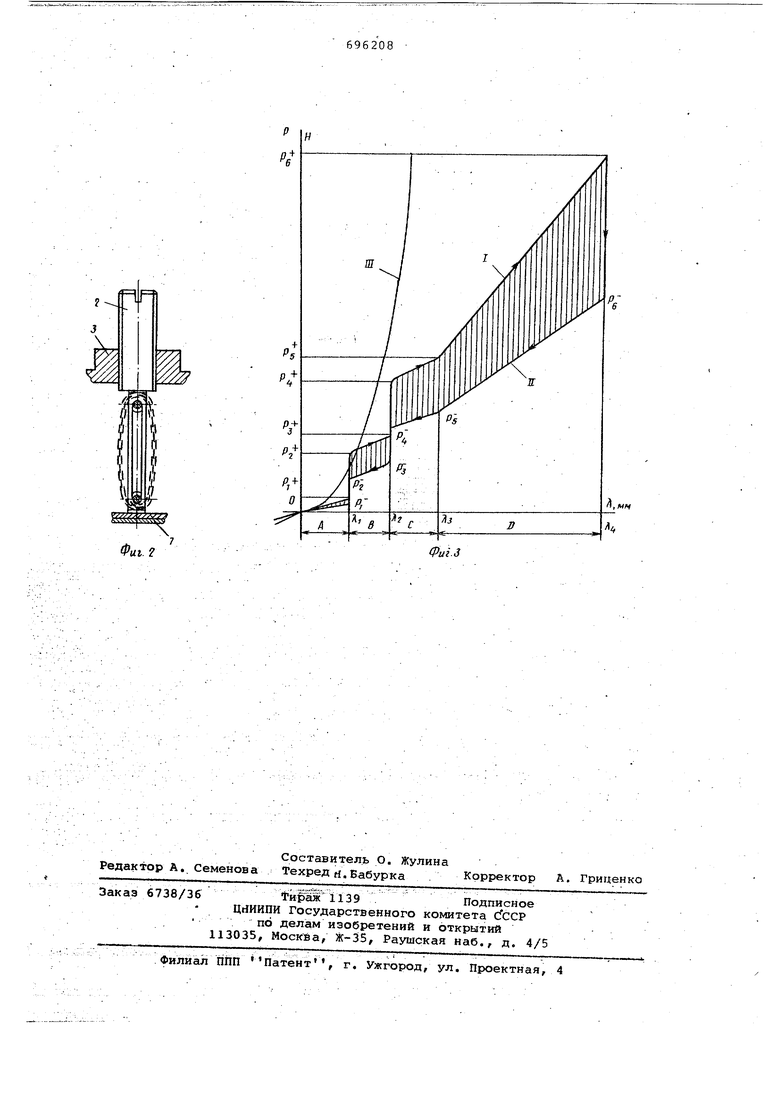
rfa фиг. 1 изображен амортизатор в разрезе; на фиг. 2 - вариант выполнения гибкой связи; на фиг. 3 - силовые, характеристики описываемого амортизатора.
Амортизатор содержит корпус 1, размещенные в. нем связываемый с амортизируе№м объектом шток 2 с поринем 3, разрезную кольцевую ось 4 упругие пружинные элементы 5 и б, установленные на разрезной оси, шайбу 7, размещенную в нижней части корпуса, взаимодействующую с упругими Элементами 5 и 6, упоры 8-10 и гибкую связь И .
При действии линейной перегрузки со стороны носителя амортизатор деформируется на величину А, которая зависит от величины линейной.
При действии ударов со стороны н6сителя в вертикальном направлении также будет подключаться в работу пружины 5 и б кручения независимо от направления действия первых импульсов (сверху вниз или снизу вверх). Эффективность гашения ударов с помощью-описываемого амортизатора высока благодаря наличию значительных сил трения, возрастающих по мере увеличения деформации амортизатора. Причем трение обусловлено относительным движением прямолинейных концевых участков 12-19 вдоль вогнутых торцов 20 и 21 поршня 3 и шайбы 7, а величина трения может быть существенно изменена подбором пар трения (например .пары трения: сталь по титану, сталь по стали, сталь по бронзе - имеют существенно отличные по величине коэффициенты трения).
Работа амортизатора при действии горизонтальных линейных перегрузок с вибрацией и ударов принципиально не отличается от рассмотренной работы амортизатора при действии вертикальных нагрузок. : :
Горизонтальное смещение поршня 3 с амортизируемым объектом относитель но корпуса, 1 приводит сначала к деформации тех пружин кручения, чьи прямолинейные кОнцевые участки 12 и 13 при контакте с вогнутой поверхностью торца 20 поршня 3 поворачиваются относит зльно нижних ррямолинейньох крйцевых участков 14я 15. Затем в контакт с торцом 20 поршня 3 входят прямолинейные концевые участки 16 и 17 пружин кручения и далее прямолинейные концевые участки 18 и 19. После того как будет выбрано провисание гибкойСВЯЗИ 11 поршня вместе с установленным на ней амортизируемым объектом она будет совершать движение, близкое к плоско-параллельному, деформируя весь комплект пружин крушения.
Такое конструктивное исполнение предлагаемого амортизатора позволяет обеспечить надежную виброиэоляцию, включая случай действия низких частот (до 5 Гц) при наличии линейных перегрузок, равных 4-150.
При действии вертик ьных линейных перегрузок шток 2 и поршень 3 с размещенным на нем амортизируемым объектом смещаются вниз относительно корпуса 1. Поршень 3 своим вогнутым торцом 20 воздействует на верхние прямолинейные концевые участки 12 и 13 пружин 5 и 6 кручения, поворачивая их к нижним прямолинейным концевым участкам 14 и 15 тех же пружин кручения. Приведенная на фиг. 3 силовая характеристика Р f(A) построена по аналитическим зависимостям, учитывгиощим смещения точек контакта поршня 3 с верхними прямолинейны)ми концевыми участками 12, 13, 16,19 пружин 5 и 6 кручения относительно нижних прямолинейных концевых участков 14 и 15 и перемещение пружин круче-, ния вдоль оси корпуса 1. Кривая I - (фиг. 3) силовая характеристика пря мого хода (при нагружении амортизатора) , кривая 11 - силовая характеристика обратного хода (при разгружении амо1этизатора) .
Амортизатор Обладает силовой характеристикой (кривые I-II), близкой к оптимальной, так как он способен воспринимать значительные (до ) Линейные перегрузки при небольших ходах штока 2 относительно корпуса 1 с ЁЫходом на участки В и С силовой характеристики, примерно параллельные . участку А. Жесткости амортизатора на участках А, в и С отличаются несуQ щественнЬ, а на участке D - в два, три раза больше,чем на участке С. Следовательно, достигнута возможность сохранения достаточно низкой частоты (3-6 Гц) собственных колебаний нагруженного амортизатора и в случае действия линейной перегрузки различной величины.
При действии линейной перегрузки 0 противоположного направления - сверху вниз - шток 2 с амортизируемым объектом смещается вверх относительно корпуса 1, в гибкой связи (цепи) 11 выбирается провисание и шайба 7, --размещенная в корпусе, начинает перемещаться вверх вдоль оси корпуса 1. Пружины 5 и 6 кручения при этом будут включаться в работу в обратной последовательности: сначала будут Деформироваться пружины кручения.
имеющие прямолинейные концевые участки 16 и 18, опертые в упОры 8-10, размещенные на уровнях и Р( , а затем пружины кручения с прямолинейными концевыми участками 12, опертыми в упоры 8-10, размещенные на саMOM дальнем уровне Р от оси корпуФормула изобретения
корпуса, упорами, выполненными в верхней части корпуса на разных уровнях относительно оси последнего, и гибкой связью, связывающей шток о шайбой.
Источники информации, принятые во внимание при экспертизе
1Авторское свидетельство СССР 317839, кл. F 16 F 15/02, 1968.
2Авторское свидетельство СССР 507724, кл. F 16 F 7/08, 1975 (прототип).
Фиг. 2
,мц
Фиг.З
