(S4) МЕХАНИЗМ ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота стрелы манипулятора | 1980 |
|
SU883403A1 |
| Механизм поворота стрелы манипулятора | 1979 |
|
SU773259A1 |
| Механизм поворота стрелы манипулятора | 1978 |
|
SU694634A1 |
| Механизм поворота стрелы манипулятора буровой машины | 1979 |
|
SU998748A1 |
| Манипулятор | 1979 |
|
SU814719A1 |
| Механизм поворота стрелы манипулятора | 1975 |
|
SU581257A1 |
| Устройство для обработки резьбовых отверстий | 1982 |
|
SU1100054A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Механизм поворота | 1987 |
|
SU1460238A1 |
| ПРИВОДНОЙ МЕХАНИЗМ СТАРТЕРА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
SU1834414A1 |
1
Изобретение относится к горной про- лышленности; в частности,, к механизмам поворота стрелы манипулятора.
Известен механизм поворота стрелы манипулятора включающий кронштейн, поворотную втулку и крышку гидроцилинд- ра, к которой прикреплен вап с нарезкой, введенной в зацепление с внутренней наъезкой штока, внешняя нарезка которого введена в зацепление с многозаходной винтовой нарезкой гайки 1.
Недостатком этого механизма является недостаточная надежность и большие габаритные размеры,
Наиболее близким решением по технической сущности и достигаемому результату является механизм поворота стрелы манипулятора, включающий гидроцилиндрвинт, поршень с внешней и внутренней винтовой нарезкой, полумуфту, подшипниковые оноры и трубопровод для подводи энергоносителя 2.
Его недостатками являются малая наj;ie XHOCTb и больший гА,5аригы.
Целью изобретения является повышение надежности и уменьшение габаритов меха1тазма.
Для достижения указанной цели подшипниковые опоры размещены по краям
цилиндра.
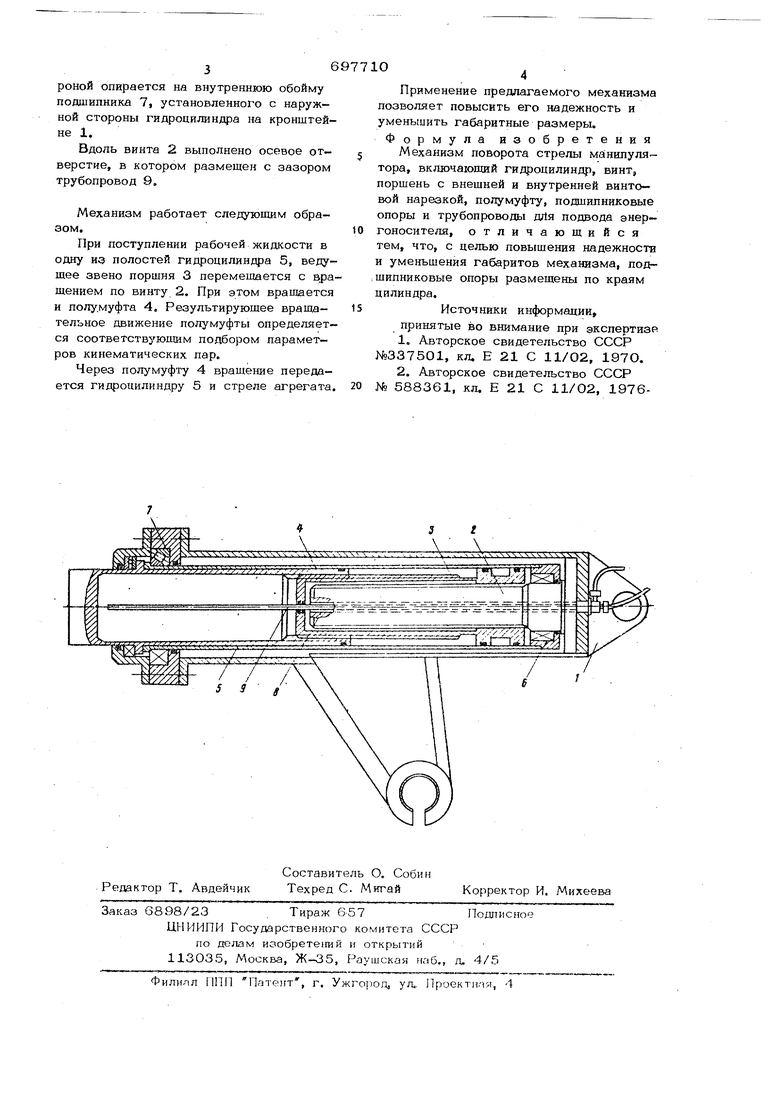
Сушдость изобретения поясняется чертежом, где показан разрез предложенного механизма.
Механизм состоит из кронштейна 1, винта 2, поршня 3, винтовой полу муфты 4, гидроцилиндра 5, внешней 6 и внутренней 7 подшипниковых опор, трубо- . проводов 8 и 9. Винт 2 жестко закрепден в кронштейне 1 н образует С поршнем 3 внутреннюю винтовую кинематическую пару. Внешней винтовой нарезкой поршень 3 входит в винтовую кинематическую пару с полумуфтой 4, которая с гидроцилиндром 5 кинематической пары не образует, Гидроцчлиндр 5 одной стороной опирается на внешнюю обойму подшипника 6, установленного внутри иилиндра на цапфе винта 2, а второй сто36
РОНОЙ опирается на внутреннюю обойму подшипника 7, установленного с наружной стороны гидроцилиндра на кронштейне 1.
Вдоль винта 2 выполнено осевое отверстие, в котором размешен с зазором трубопровод 9.
Механизм работает следующим образом,
При поступлении рабочей жидкости в одну из полостей гидроцилиндра 5, ведущее звено поршня 3 перемешается с вращением по винту 2. При этом врашается и полу.муфта 4. Результирующее вращательное движение полумуфты определяется соответствующим подбором параметров кинематических пар.
Через полумуфту 4 вращение передается гидроцилиндру 5 и стреле агрегата.
10,
Применение предлагаемого механизма позволяет повысить его надежность и уменьшить габаритные размеры. Формула изобретения
Механизм поворота стрелы манипулятора, включающий гидроцилиндр, винт, поршень с внешней и внутренней винтовой нарезкой, полумуфту, подшипниковые опоры и трубопроводы дЛя подвода энергоносителя, отличающийся тем, что, с целью повышения надежности и уменьшения габаритов механизма, под; шипниковые опоры размещены по краям цилиндра.
Источники информации,
принятые во внимание при экспертизе
№ 588361, кл, Е 21 С 11/О2, 1976
