1
Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенньп«1 для работы в автоматическом цикле различного технологического оборудования.
Известны манипуляторы, в которых механизмы двух вращательных движений относительно двух взаимно перпендикулярных осей, с целью достижения компактности, так или иначе кинематически связаны друг с другом Ц.
Известны также манипуляторы, включающие механизм вьщвижения руки, мехнизм поворота руки и механизм схвата 21.
Недостатком указанных манипуляторов является зависимость двух вращательных движений друг от друга, что вызывает необходимость корректировки в программе управления роботом
Цель изобретения - обеспечение компактности конструкции и независимости степеней свободы.
Указанная цель достигается тем, что манипулятор снабжен механизмом поворота кисти в виде гидравлического двухштокового цилиндра, установленного соосно с телескопическим цилиндром механизма выдвижения руки, при этом шток телескопического цилиндра связан с одним из штоков двукштокового цилиндра винтовым соединением, а второй шток связан аналогичным соединением с соответствующим исполнительным элементом.
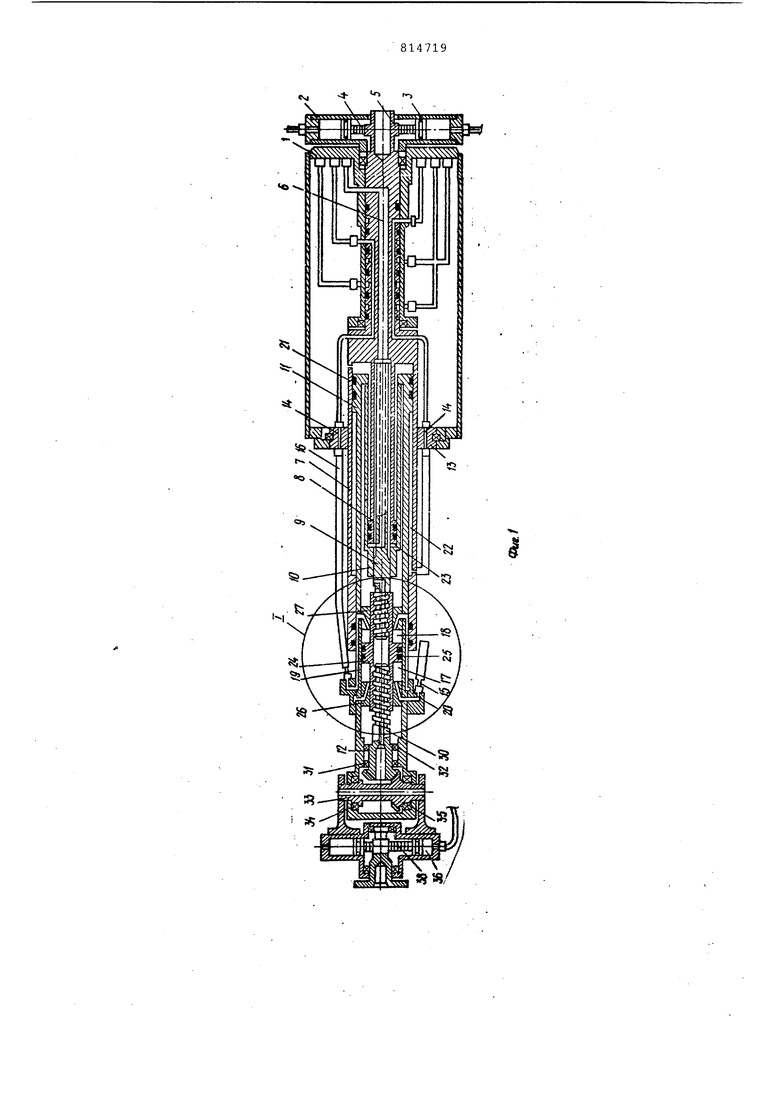
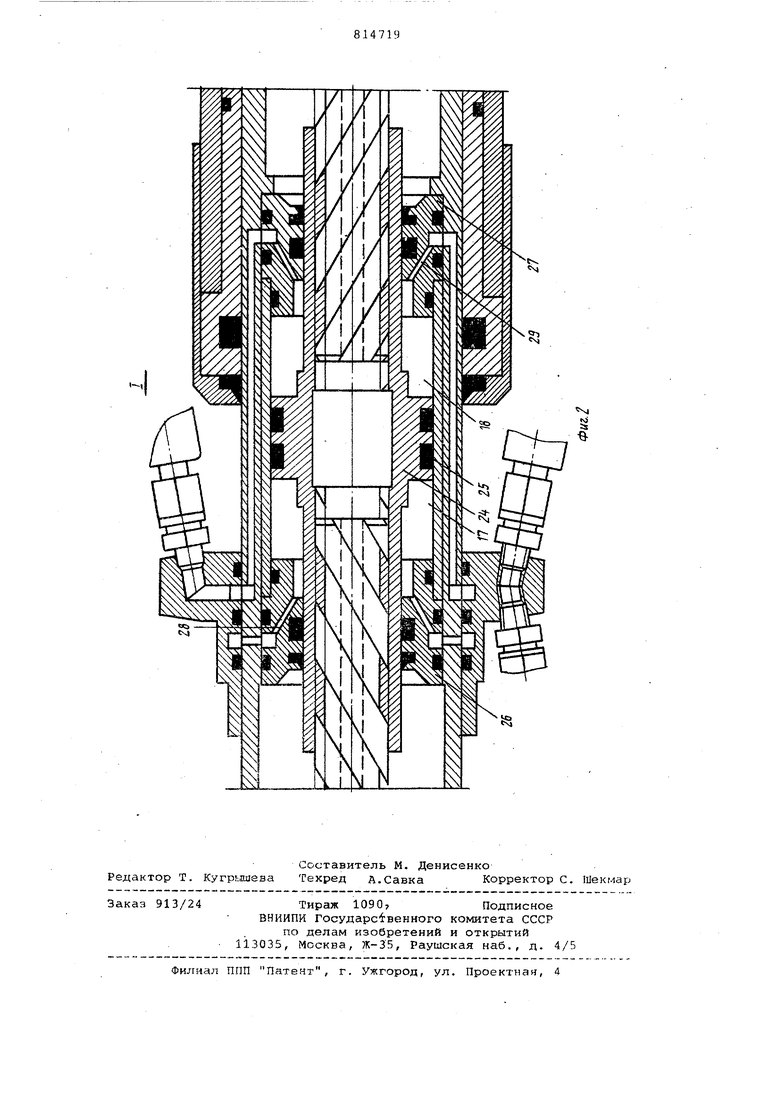
На фиг. 1 представлен манипулятор, общий вид в разрезе; на фиг. 2 узел 1 на фиг. 1.
Манипулятор состоит из четырех
0 функциональных узлов, конструктивно CBHsaHHtox друг с другом: механизма поворота руки, механизма выдвижения руки, механизма поворота кисти и механизма охвата.
5
Механизм поворота руки состоит из неподвижного корпуса 1, на котором смонтированы гидроцилиндры 2 и 3. поршни которых соединены общей штокрейкой 4, находящейся в зацеплении
0 с цилиндрической вал-шестерней 5, в которой вьшолнен канал б. Ваш-шестерня 5 жестко соединена с гильзой 7,. а также с полым цилиндром 8, в котором установлен шток 9 со шлицами. Полый цилиндр 8 телескопически расположен в гильзе 10, жестко связанной с полым шток-поршнем 11, который соединен с корпусом 12.
На гильзе 7 установлен специгшь0 ный подшипник 13, во внутреннем кольце которого выполнены отверстия 14, соединённые с трубопроводами 15 и 16 необходимые для подачи рабочей жидкости в гидрополости цилиндра поворо та кисти 17 и 13 по каналам 19 и 20, Механизм выдвижения руки состоит из полого шток-поршня 11, гильзы 10, штока 9 и полого цилиндра 8, соединенного с вал-шестерней 5. На шток-г поршне 11 установлены уплотнения 21. При этом гильза 7 и полый шток-поршень 11, а также гильза 10 и полый цилиндр 8 образуют соответственно гидрополости 22 и .23 цилиндров механизма выдвижения руки. Механизм поворота кисти состоит и двухштокового цилиндра 24 с уплотнениями 25, при этом его наружная поверхность направляется по цилиндрическим поверхностям втулок 26 и 27. Последние содержат каналы 28 и 29 для подачи рабочей жидкости в полости гидроцилиндра 17 и .18 механизма поворота кисти, внутренние поверхнос ти двухштокового цилиндра 24 имеют винтовые нарезки с правым и левым н правлением, которыми на участке сопряжения со втулкой 26 осуществляется соединение с вал-шестерней 30, а на участке сопряжения со втулкой 27 - со штоком 9. Вал-шестерня 30 установлена на конических подшипниках 31 и 32, наружные кольца которых сопрягаются по внутреннему диаметру корпуса 12. С конической вал-шестер ней 30 в зацеплении находится выход ной вал кисти 33, установленный на конических пo щlипникax 34 и 35, заделанных в корпус 12 руки. Механизм схвата руки содержит дв гидроцилиндра 36 и 37, поршни которых соединены с общей шток-рейкой 3 соединенной с исполнительным устрой ством манипулятора. Манипулятор работает следующим образом., При подаче рабочей жидкости от и точника давления в гидрополости цилиндров 2 или 3 поршни гидроцилиндров перемещают шток-рейку 4, преобразуя ее поступательное движение во вращательное движение механизма поворота руки через вал-шестерню 5. При этом, поскольку вал-шестерня 5 жестко соединена с гильзой 7, полым шток-поршнем 11, который в свою оче редь жестко соединен с корпусом 12 и одновременно полый шток-порлень 1 жестко соединен с валом-шестерней 5 через гильзу 10 и шток 9 со шдицшчш обеспечивается поворот на угол, задаваемый вал-шестерне 5 всего указа ного соединения. При подаче энергоносителя в полость 22 происходит втягивание руки манипулятора (перемещение шток-порд ня 11 вправо), что соответствует его исходному положению. При подаче энергоносителя в полость 23 происходит выдвижение руки манипулятора. При подаче энергоносителя по трубопроводам 15 или 16 через каналы 20 или 19 соответственно в гидрополости 17 или 18 происходит перемещение в ту или иную сторону двухштокового цилиндра 24, который поворачивается по винтовой нарезке относительно штока 9. Одновременно вал-шестерня 30 по винтовой нарезке поворачивается относительно двухштокового цилиндра 24, и его врсццательное движение преобразовывается через коническую пару в поворот кисти манипулятора. При подаче энергоносителя в гидроцилиндры 36 и 37 происходит пере-. мещение их поршней со шток-рейкой 38, соединенной с исполнительным устройством манипулятора. Таким образом, предлагаемая конструкция дает возможность компоновки в руке манипулятора четырех степеней свободы (поворот руки, выдвижение руки, поворот кисти, схват руки) с обеспечением полной независимости движений.друг относительно друга и компактности конструкции вследствие расположения механизма поворота кисти внутри механизма выдвижен.чя руки. Формула изобретения Манипулятор, включающий механизмы выдвижения руки, поворота руки и мехаЕ изм схвата, каждый из которых выполнен в виде гидродвигателя, кинематически соединенного- с соответствующим исполнительным элементом, при этом механизм выдвижения руки выполнен в виде телескопического цилиндра со штоком, отличающийс я тем, что,с целью обеспечения компактности конструкции и независимости степеней свободы, манипулятор снабжен механизмом поворота кисти в виде гидравлического двузоитокового цилиндра, установленного соосно с телескопическим цилиндром механизма выдвижения руки, при этом шток телескопического цилиндра связан с одним из штоков двухштокового цилиндра соединением, а второй, шток . связан аналогичным соединением с соответствующим исполнительным элементом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 527554, кл. F 16 Н 1/40, 17.01.74. 2. Авторское свидетельство СССР 595143, кл. в 25 J 9/00, 04.10.76.
«м
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Манипулятор | 1981 |
|
SU971644A1 |
| Манипулятор | 1977 |
|
SU611774A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Кисть манипулятора | 1981 |
|
SU973347A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Рука промышленного робота | 1979 |
|
SU776913A1 |