(54) УСТРОЙСТВО ДЛЯ ЛИНЕЙНОГО ШАГОВОГО ПЕРЕМЕЩЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для линейного шагового перемещения | 1972 |
|
SU482732A1 |
| Устройство для линейного шаговогопЕРЕМЕщЕНия | 1979 |
|
SU798732A1 |
| Устройство для линейного шагового перемещения | 1986 |
|
SU1352122A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАИОВКИ И ЗАКРЕПЛЕНИЯ ПРИ ОБРАБОТКЕ СКОСОВ ИЗДЕЛИЙ ТИПА КОРПУСА БУРОВОГО ДОЛОТА | 1968 |
|
SU208416A1 |
| Устройство для маркировки изделий | 1972 |
|
SU477758A1 |
| Устройство для линейного шагового перемещения | 1990 |
|
SU1763760A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Гидропривод шагового перемещения | 1977 |
|
SU691614A1 |
| УСТРОЙСТВО ДЛЯ КЛЕЙМЕНИЯ | 1992 |
|
RU2015767C1 |
| Гидравлический домкрат | 1987 |
|
SU1404451A1 |
I
Изобретение относится к системам автоматр ческого управления и может быть использовано, в частности, для шагового перемещения программоносителя в программных устройствах.
По основному asi.cB. № 482732 известно устройство для линейного шагового перемеидения, содержащее зубчатую рейку с реверсивным приводом продольного перемещения, например пневматическим, и фиксатор зубьев рейки, который снабжен двумя параллельными выступами, смеи1ен1гыми один относительно другого в поперечном направлении на длину зуба рейки, а в продольном направлении - на полшага зубьев рейки, причем ширина зубье рейки и выступов фиксатора не превьш1ает четверти uiara. Фиксатор снабжен также управляющими приводами поперечного перемещения в виде трех расположенных на одной оси приводов одностороннего действия, т.е. одна полость каждого привода является рабочей и сообп1ена с выходом распределителя. Приводы поперечного перемсп1ения обеспечивают перемещение фиксатора и его остановку R трех позициях. Эти приводы могут быть пневматическими или гидравлическими. В первых двух ПОЗИ1ШЯХ фиксатора один из его выступов находится в зацеплении с зубом рейки. В третьей позиции упоры фиксатора выведены из зоны фиксации.
Для перемещения фиксатора из первой позиции во вторую одному из приводов поперечного перемещения приходится преодолевать усилие другого привода, что увеличивает время перемещения фиксатора и, следовательно, снижает быстродействие устройства.
Целью изобретения является повышение быстродействия устройства для линейного шагового перемещения.
Это достигается тем, что в предлагаемом устройстве для линейного шагового перемещения оси каждого из приводов поперечного перемещения фиксатора перпендикулярны друг другу.
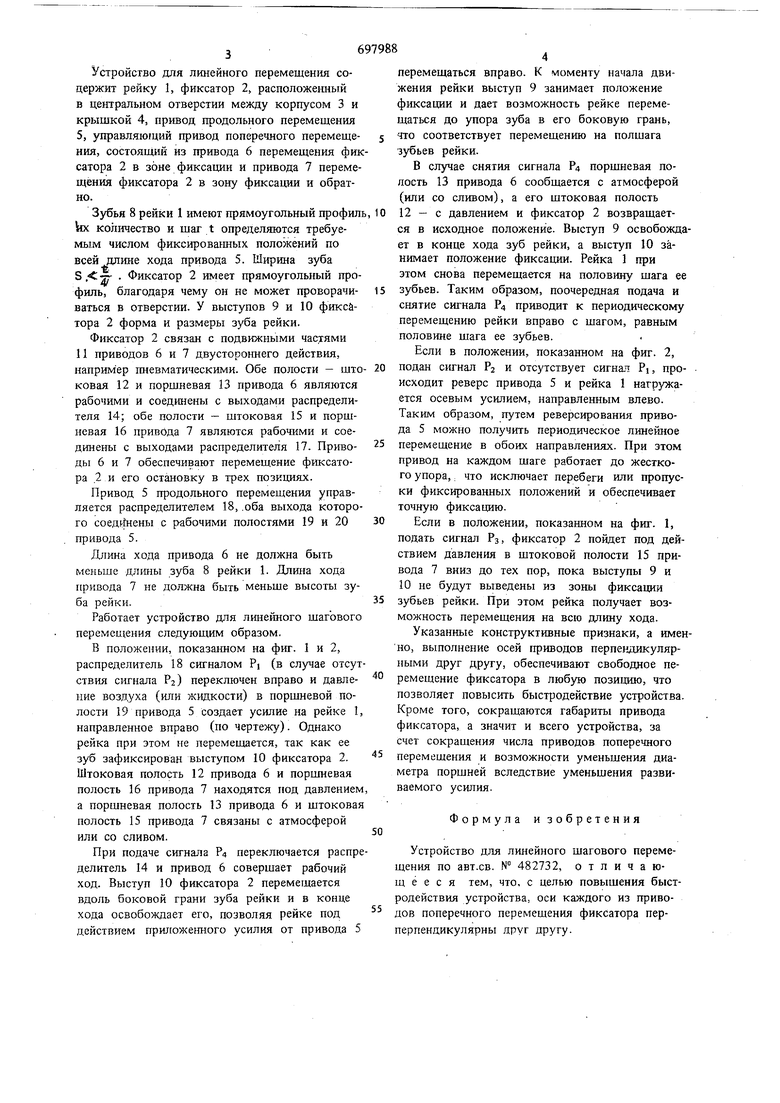
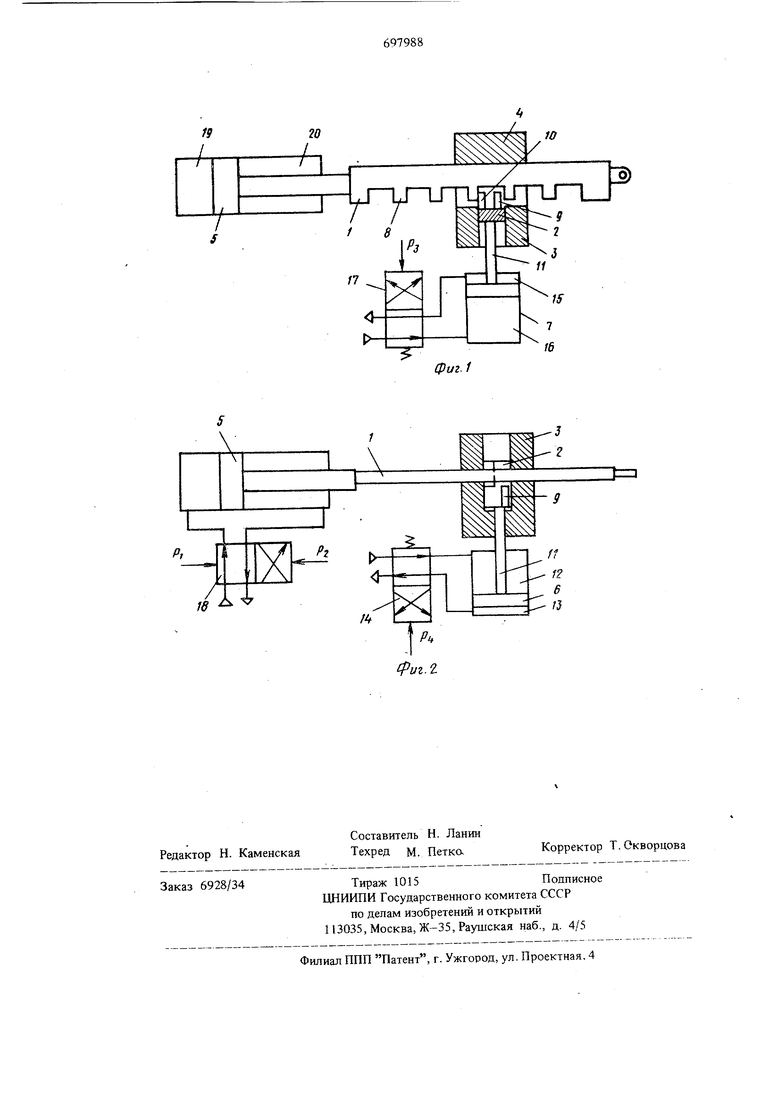
На фиг. 1 показана схема устройства Ш1я линейного uiai ового перемещения вид сбоку. на фиг. 2 то же. нил сверху. Устройство для линейного перемещения содержит рейку 1, фиксатор 2, расположенный в центральном отверстии между корпусом 3 и крышкой 4, привод продольного перемещения 5, управляющий привод поперечного перемещения, состоящий из привода 6 перемещения фик сатора 2 в зоне фиксации и привода 7 перемещения фиксатора 2 в зону фиксации и обратно. Зубья 8 рейки 1 имеют прямоугольный профил йк количество и щаг t определяются требуемым числом фиксирова шых положений по всей длине хода привода 5. Ширина зуба S , 27 Фиксатор 2 имеет прямоугольный профиль, благодаря чему он не может проворачиваться в отверстии. У выступов 9 и 10 фиксатора 2 форма и размеры зуба рейки. Фиксатор 2 связан с подвижными частями 11 приводов 6 и 7 двустороннего действия, например пневматическими. Обе полости - щто ковая 12 и поршневая 13 привода 6 являются рабочими и соединены с выходами распределителя 14; обе полости -- штоковая 15 и порщневая 16 привода 7 являются рабочими и соединены с выходами распределителя 17. Приводы 6 и 7 обеспечивают перемещение фиксатора .2 и его остановку в трех позициях. Привод 5 продольного перемещения управляется распределителем 18, .оба выхода которого соедр1нень с рабочими полостями 19 и 20 привода 5. Длина хода привода 6 не должна быть меньше дл1шы зуба 8 рейки 1. Длина хода привода 7 не должна быть меньще высоты зуба рейки. Работает устройство для линейного шагового перемещения следующим образом. В положении, показанном на фиг. 1 и 2, распределитель 18 сигналом Pj (в случае отсут ствия сигнала Ра) переключен вправо и давление воздуха (или жвдкости) в поршневой полости 19 привода 5 создает усилие на рейке 1 направленное вправо (по чертежу). Однако рейка при этом не перемещается, так как ее зуб зафиксирован выступом 10 фиксатора 2. Штоковая полость 12 привода 6 и поршневая полость 16 привода 7 находятся под давлением а поршневая полость 13 привода 6 и щтоковая полость 15 привода 7 связаны с атмосферой или со сливом. При подаче сигнала Р4 переключается распр делитель 14 и привод 6 совершает рабочий ход. Выступ 10 фиксатора 2 перемещается вдоль боковой грани зуба рейки и в конце хода освобождает его, позволяя рейке под действием приложевшого усилия от привода 5 перемещаться вправо. К моменту начала движения рейки выступ 9 занимает положение фиксации и дает возможность рейке перемещаться до упора зуба в его боковую грань, что соответствует перемещению на полшага эубьев рейки. В случае снятия сигнала Р4 поршневая полость 13 привода 6 сообщается с атмосферой (или со сливом), а его щтоковая полость 12 - с давлением и фиксатор 2 возвращается в исходное положение. Выступ 9 освобождает в конце хода зуб рейки, а выступ 10 занимает положение фиксации. Рейка 1 при этом снова перемещается на половину щага ее зубьев. Таким образом, поочередная подача и снятие сигнала Р4 приводит к периодическому перемещению рейки вправо с шагом, равным половине шага ее зубьев. Если в положении, показанном на фиг. 2, подан сигнал Р и отсутствует сигнал PI, происходит реверс привода 5 и рейка 1 нагружается осевым усилием, направленным влево. Таким образом, путем реверсирования привода 5 можно получить периодическое линейное перемещение в обоих направлениях. При зтом привод на каждом щаге работает до жесткого упора,, что исключает перебеги или пропуски фиксированных положений и обеспечивает точную фиксацию. Если в положении, показанном на фиг. 1, подать сигнал РЗ, фиксатор 2 пойдет под действием давления в штоковой полости 15 привода 7 вниз до тех пор, пока выступы 9 и 10 не будут выведены из зоны фиксации зубьев рейки. При этом рейка получает возможность перемещения на всю длину хода. Указанные конструктивные признаки, а именно, выполнение осей приводов перпендикулярными друг другу, обеспечивают свободное перемещение фиксатора в любую позицию, что позволяет повысить быстродействие устройства. Кроме того, сокращаются габариты привода фиксатора, а значит и всего устройства, за счет сокращения числа приводов поперечного перемещения и возможности уменьшения диаметра поршней вследствие уменьшения развиваемого усилия. Формула изобретения Устройство для линейного шагового перемещения по авт.св. № 482732, отличающееся тем, что, с целью повышения быстродействия устройства, оси каждого из приводов поперечного перемещения фиксатора перперпендикулярны друг другу.
