1
Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов .
Известен манипулятор промышленного робота, содержащий привод линейного перемещения 1.
Недостатком известного манипулятора является наличие большого количества элементов привода и сложность конструкции.
Целью изобретения является упрощение конструкции.
Для этого предлагаемый модуль промьошленного робота выполнен в виде расположенной в направляющих каретки св язанной с двух сторон посредством силовых элементов, стенки которых имеют гофры, с этими направляющими, причем на концах направляющих имеются фланцы.
На чертеже изображен модуль промышленного робота.
Он содержит привод линейного перемещения, состоящий из каретки 1, перемещающейся по направляющим 2, которые скреплены фланцами 3, и силовые элементы, выполненные в виде
сильфонов 4 к 5, Сильфоны I и 5 посредством дополнительных ползунов 6 соединены с направляюпшми 2.
Модуль работает следугеиц-гм образом.
Рабочую среду подают в сильфон 4 и стравливают среду из сильфона 5. При этом каретка 1 соверазает движение, вид которого зависит от вида направляющих 2.
Формула изобретения
Модуль промышленного робота, содержащий привод линейного перемещения, отличающийся тем, что, с целью упрощения конструкции, он выполнен в виде расположенной в направляющих каретки, связанной с двух сторон посредством силовых элементов, стенки которых имеют гофры,, с этими направляющими, причем на :концах направляющих имеются фланцы. I Источники информации, принятые во внимание при экспертизе I 1. Белянин П.Н. Промышленные роботы, Машиностроение , 1975, ,с 41-46.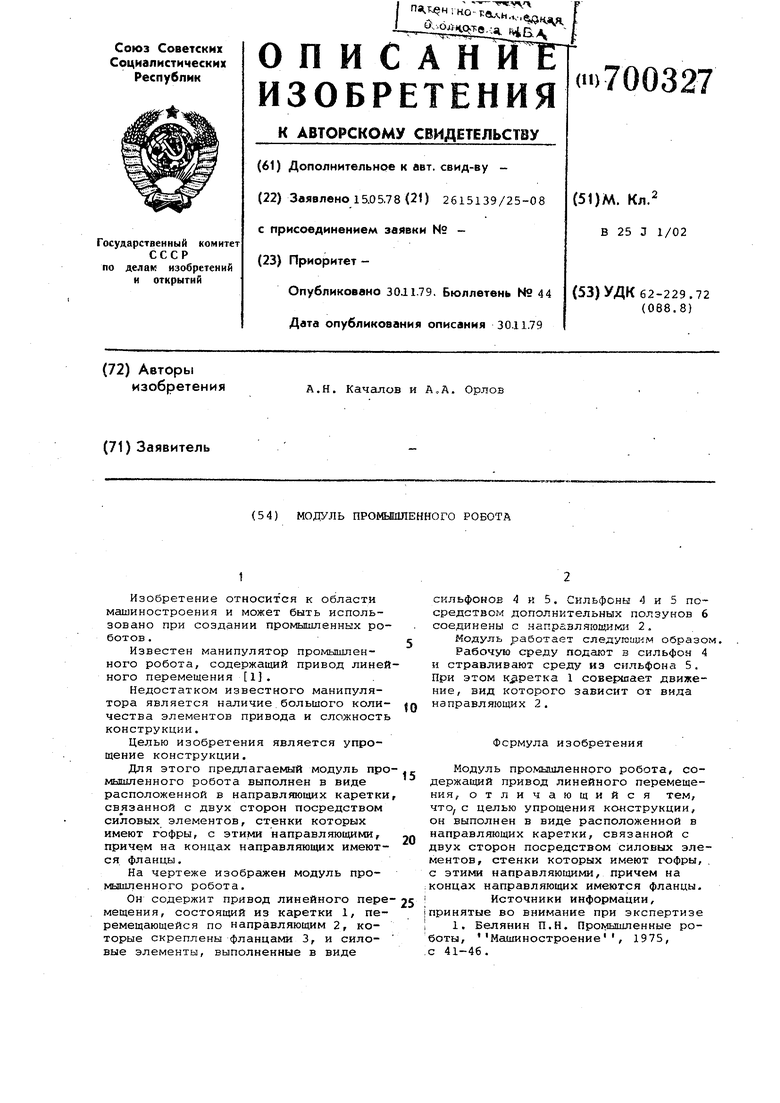
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1980 |
|
SU880711A2 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Гибкая производственная система для обработки деталей типа валов | 1986 |
|
SU1371868A1 |
| Модуль промышленного робота | 1980 |
|
SU918084A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Модуль линейного перемещения промышленного робота | 1989 |
|
SU1664546A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Модуль манипулятора | 1991 |
|
SU1776556A1 |