(54) МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| Захват манипулятора | 1989 |
|
SU1779581A1 |
| Устройство для поштучной выдачи деталей | 1980 |
|
SU918014A2 |
| Манипулятор | 1980 |
|
SU918080A1 |
| Устройство для поштучной выдачидЕТАлЕй | 1979 |
|
SU810437A1 |
| Устройство для управления перемещением кулачков токарного патрона | 1982 |
|
SU1076206A1 |
1
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
По основному авт. св. № 700327 известен модуль промышленного робота, содержаший привод линейного перемеш.ения, причем модуль выполнен в виде расположенной в направляющих каретки, связанной с двух сторон посредством силовых элементов, стенки которых имеют гофры с этими направляющими, а на концах направляющих имеются фланцы (1.
Недостатком известного модуля является низкая точность позиционирования, затрудняющая его промышленное использование.
Цель изобретения - повышение точности позиционирования модуля
Цель достигается тем, что модуль промышленного робота снабжен фиксирующим устройством, выполненным в виде корпуса, расположенных в нем соосно направляющей модуля цанги, подпружиненного якоря и катушки с обмоткой, причем корпус фиксирующего устройства жестко связан с кареткой модуля.
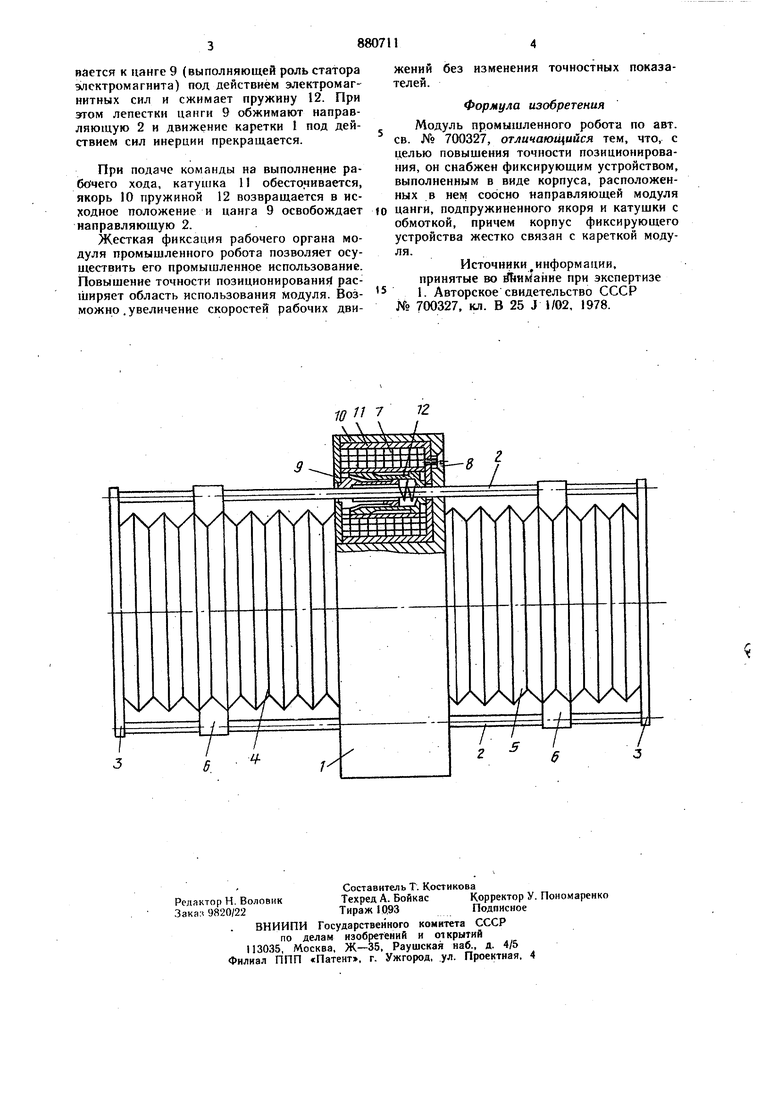
На чертеже изображен модуль промышленного робота.
Модуль содержит привод линейного перемещения, состоящий из каретки I, перемещающейся по направляющим 2, которые 5 скреплены фланцами 3, силовые элементы, выполненные в виде сильфонов 4 и 5 и связанные с направляющими 2 посредством дополнительных ползунов 6 и фиксирующее устройство. Последнее выполнено в корпусе 7 и винтами 8 жестко связано с кареткой 1. 10 В корпусе 7 размещены цанга 9, выполненная с возможностью воздействия на направляющую 2, якорь 10, катушка П и пружина 12, определяющая расположение якоря относительно цанги 9.
Модуль работает следующим образом.
Рабочую среду подают в сильфон 4 и стравляют среду из сильфона 5. При этом каретка 1 совершает движение, .вид которого зависит от вида направляющих 2. Для прекращения движения каретки i от уст-д ройства программного управления (не показано) поступает единый сигнал на перекрытие эиергокоммуникаций сильфонов 4 и 5 и включение катушки 11. Якорь 10 притягивается к цанге 9 (выполняющей роль статора электромагнита) под действием электромагнитных сил и сжимает пружину 12. При этом лепестки цанги 9 обжимают направляющую 2 и движение кареткн I под действием сил инерции прекращается.
При подаче команды на выполнение рабочего хода, катушка 11 обесточивается, якорь 10 пружиной 12 возвращается в исходное положение и цанга 9 освобождает направляющую 2.
Жесткая фиксация рабочего органа модуля промышленного робота позволяет осуществить его промышленное использование. Повыщение точности позиционирований расширяет область использования модуля. Возможно .увеличение скоростей рабочих движений без изменения точностных показателей.
Формула изобретения
Модуль промышленного робота по авт. св. № 700327, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен фиксирующим устройством, выполненным в виде корпуса, расположенных в нем соосно направляющей модуля цанги, подпружиненного якоря и катушки с обмоткой, причем корпус фиксирующего устройства жестко связан с кареткой модуля.
Источники,информации, принятые во при экспертизе 1. Авторское свидетельство СССР N° 700327, кл. В 25 J 1/02, 1978.
1Д1/
А
/
,
К
чА/
