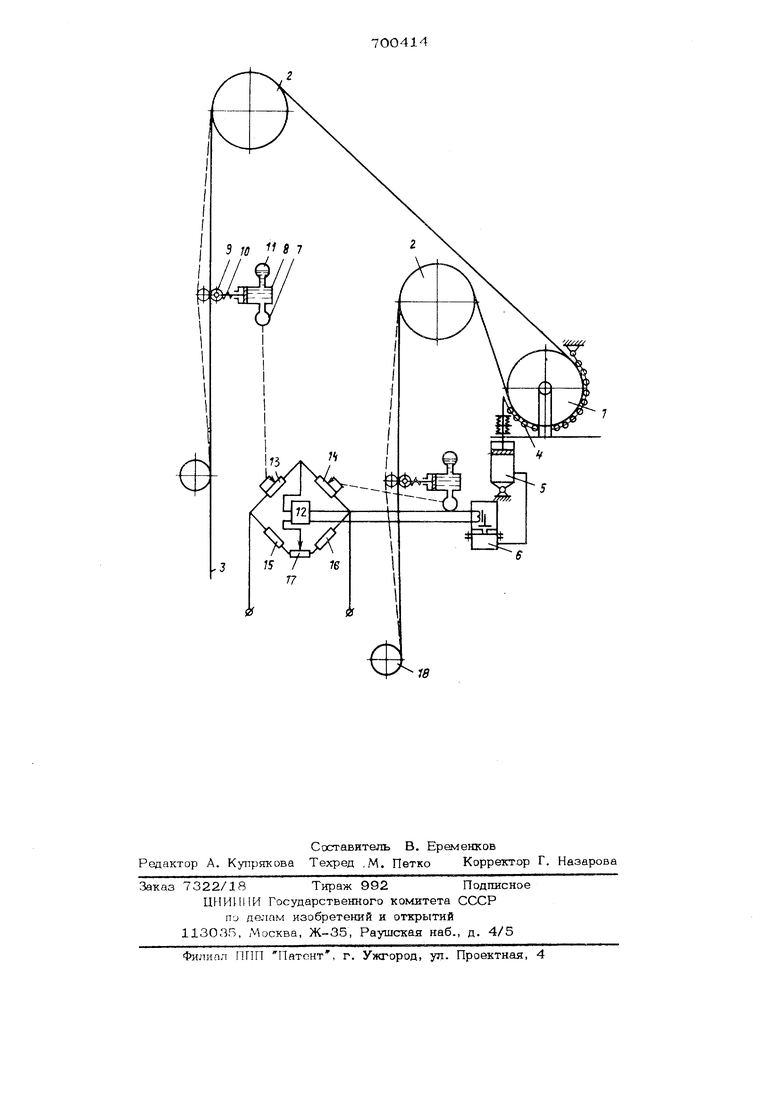
Изобретение относится к подъемным устузойстпам, а именно к устройства-М кон троля надожз ости работы подъемных уста новок со шкивами трения. Иэвс5стно ycTpoiteTBo для контроля разности натяжений гибкого органа подъемников со цпо1ва ми трения, содержащее гфижимн1ле роликл, взаикшсвязанные посредством промежуточных эл 1ентоБ с 1ФИЖИМНОЙ рогшковой цепью, снабженной приводом натяжения с регулятором давле- шш 1. Однако такое устройство не обеспечивает требуем oil безопасности из-за жесткого расстояния между ветвями гибкого органа, что обусловл1та€}Т определенные размеръ диф ференш1ального механизма. Кроме того, при такой конструкции обязательн111м является одностороннее .направ лонио ветвей гибкого органа. Целью изобретения является повьпиени безопасиостн эксплуатации устройства путем обесгк;чения возможзгасти измерения разности натяжений нсзавиолю от расстояния между ветвя.и гибкого oj-iraHa. Для этого 1тро аеж точныс элементы содержат датчики давления и гидравличск;ки связа1шые с ними Г51дронилиндр11. }ia штоках которых CNfoitTupoBaHbi подпр Ткиненшле ролики, озаимодейств тошие с Kaxyioii из ветвей гибкого органа, при этом уст{)ойство снабжено резисторами, взаимос;вязагшыми с датчиками давле) и э.токтричес1ш соединенными в мостик, и уо лителем, включенным в диагона;ть К о :тика и электричесю cвязaш- ы с регулятором давления пр1гж:1ск ной цепи. На чертеже дана cxe,ia устройства для контроля разности натяжений гибк.ло органа подъемниха. Устройство для контроля разности натяжеш1й гибкого органа пол1)0мник 1 содержит канатовед тдий шюш 1. ){ппрапляющне шкивы 2, огибаек ые гибким тяг.)вык органом 3, прижлмную роликопуы 4. взаимосвязанную с пружинно-ги;ц1авч1рц(-
KHM пртзидом ) натя oiiiisi, искгиноянык регулятиром давлошгя fi. Устрэ|гсТ1;и слпбжено датчиками 7 данло ия. гидр пвли-чсх;.тси связан1П.пч1И с гидрэиилтшрпми Я, нп (итоках которых скгэптиузопаны piwnmn П, поджатые пружшгами 10. Гицроцил1пщ 1 8 соодияенГ) сфер гчех:к1ГКГи niroHMo- ju:j гидpoaю yмyлят9pa fи 11. Гегулятор о давления г ривода натяжения аг(ектр1гчески связан с усилнталем 12, включе ш:ым в диагоналт, мостика, образованного резисторами 13-1 в и содержащие.- регулир-овочный резистор 17.
Устройство работает следугощиз, образом.
Зоной иамерения натяжений в ветвях каната являются участки между копрозыми шкивами 2 и базовыми 18. Величина прогиба каната персздаотся на гидравлическую часть датчиков 6 дав;;е ния (типа МДТ) посредствол- роликов 9, установленных на штоках гидроикл пузрез 8 и поджатых пружинами 1О. Резисторь; 13, 14 электрической части датч5-гков 6 вместе с резисторами 15, 16 соед. В мостик, который составлен так, что при максимальной или миншушльной разности натягжений он остается сбалансированньп. IB случаях недопустим о и разности натя|жений, влекущей за собой потерю фрикдаонной связи, троисходит разбалаискрование системы, и электрический сигнал чер усилитель 12 передается в цег.ъ управления регулятора 6 давления. Воздействием регулятора 6 на привод 5 ocyaxei T.вл,яется регулируемое усилие прижатия роликовой цепи 4 к канатоведущему покизу 1 подъемной мащины.
Исполъ.зовагшс2 изобретения обеспечит технический и экономический 3 :{x}jeKT. Контроль разности натяжений ветвей канатов с оптима.тьным peгyлиpoвaниevl прижатия роликовой цепи для обск;пеЧГЮИ ,,;Й :f ) К аиЛТ (Г ,
шкива с ПГ.ГЬК) 1р|Д J7 (};; 1Ц1чи1я ajjapKfWfMX г:итуа 1Кй г р(-- л1;к:IX , .)т,;п-гча зщихгя от расчетных, ь; n.j/Cff- ibix о 1е;|-лши г- .,1и rpyo/sMH, п тпкжп при np:nt3B XiibНОК- расстоянли межд; ветвями и любом их взаикпшм расшололсепии, является техН1гчесхи-м п|)еим;;-1Ц х:тг ом перед ис1Вест}П1 ш решениями т;1кой :)ол,ач}.
о р м у л а
Устройство для контроля разности натяжений гибкого opra:in тюдьемню-сов со шклтвми треш1я, соде;«-ка;цее прижимн.ме роликк, воаи.ГоспязаЕП-:ыс посредством 1фомежуточных э.чеме1ггов с 1ц)иж№.-;ной роликовой цеяью, ) прир.одо;-натггжения с })огулятиром давлемшя, о т л и ч а ю Li о е с я тем, что, г целью повьпленз- 5 без пасности эксплуатации n rrejvi обеспечения воаможности из мерег-шя разности нат;гжений тезавксимо от расстояния г-лежду зетвят-ли гибкого органа, гфомеж точнью содержат датчики давления и гкдравличе г-кн связанные с HjcMH г;щро шлипдрг г, на штоках которых смонтнроБаны подпр жа-пшшгые ролики, взаямодействующке с каждой нз ветве гибкохо органа, при этом устр1;йство сг-габжено резистора ли, вс-каимосвясмшп-гми с дaт«ккa - и давления ) электрически соединенными Б мостик, и усилитшкзм, :з и1юченньш1 л Д1;агогшль мостика я электркчес.к.и связагагым с рег 71яторок дагитсяля приводе ири кил-1Ной ро.ликог..ой цепи.
Источники HHd ации, принятзле во В; гмани ; in-к якс пертизс
1, Авторское свидетельств J (:(Ч;Г /V 639792, кл, В 66 В 0/12. . пт)отот1ш).
0
18
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1977 |
|
SU639792A1 |
| Устройство для предотвращения проскаль-зыВАНия KAHATA шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827368A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1988 |
|
SU1557043A1 |
| Устройство для регулирования рабочих натяжений канатов многоканатной подъемной установки | 1980 |
|
SU956406A1 |
| Способ управления многоканатной подъемной установкой с приводным и отклоняющим шкивами | 1983 |
|
SU1197973A1 |
| ЛИФТ С НЕСКОЛЬКИМИ ПРИВОДНЫМИ ЛЕНТОЧНЫМИ БАРАБАНАМИ БЕЗ ПРОТИВОВЕСА И НИЖНИМ РАСПОЛОЖЕНИЕМ ПРИВОДА | 2000 |
|
RU2171218C1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| Способ предотвращения проскальзыванияКАНАТА шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827367A1 |
| Устройство регулирования процесса предохранительного торможения шахтной многоканатной подъемной машины | 1986 |
|
SU1442493A1 |