1
Изобретение относится к области промышленного транспорта, а именно к устройствам для передачи изделий с одного конвейера на другой.
Известно устройство для передачи изделий с одного конвейера на другой, включающее перегрузочный механизм и привод, причем перегрузочный механизм выполнен в виде поворотного мостика, транспортирующие органы которого проходят снизу через плоскость транспортировки первого и второго конвейеров 1.
Однако это устройство обладает малой надежностью в работе и-низкой производительностью, так как перемещение изделий в нем происходит под действием их собственного веса, а очередное изделие может поступать на поворотный мостик только после возврата его в крайнее положение.
Известно также устройство для передачи изделий с одного конвейера на другой, включающее перегрузочный механизм с толкателем и приводом, причем перегрузочный механизм выполнен в виде трех желобов 2.
Недостатком этого устройства яапяется сложность конструкции, низкая производительность и малая наде;и1ость работы, т.к. изделия, находящиеся на подающем конвейере, могут nocTjпать на позицию перегрузки только после возврата толкателей в исходное положение, а перемещение изделий по поворотному желобу происходит под действием их собственного веса.
Целью, изобретения является упрощение конструкции, повышение производительности и надежности работы устройства.
Цель достигается тем, что в устройстве перегрузочный механизм выполнен в виде подвижной каретки с ограничителем поворота толкателя, который выполнен в виде двуплечего рычага, шарнирно закрепленного на каретке, при этом одно его плечо шарнирно соединено посредством шатуна с приводом, а другое выполнено с возможностью взаимодействия с изделием при рабочем ходе и прохождении под изделием при холостом ходе.
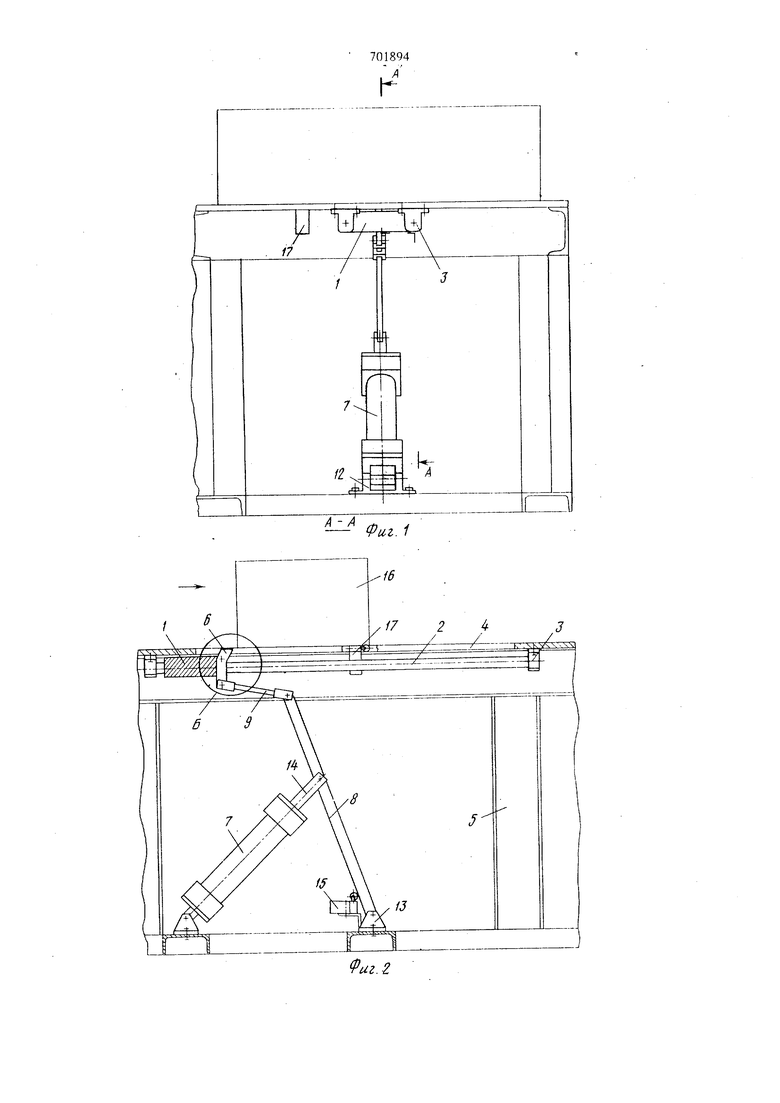
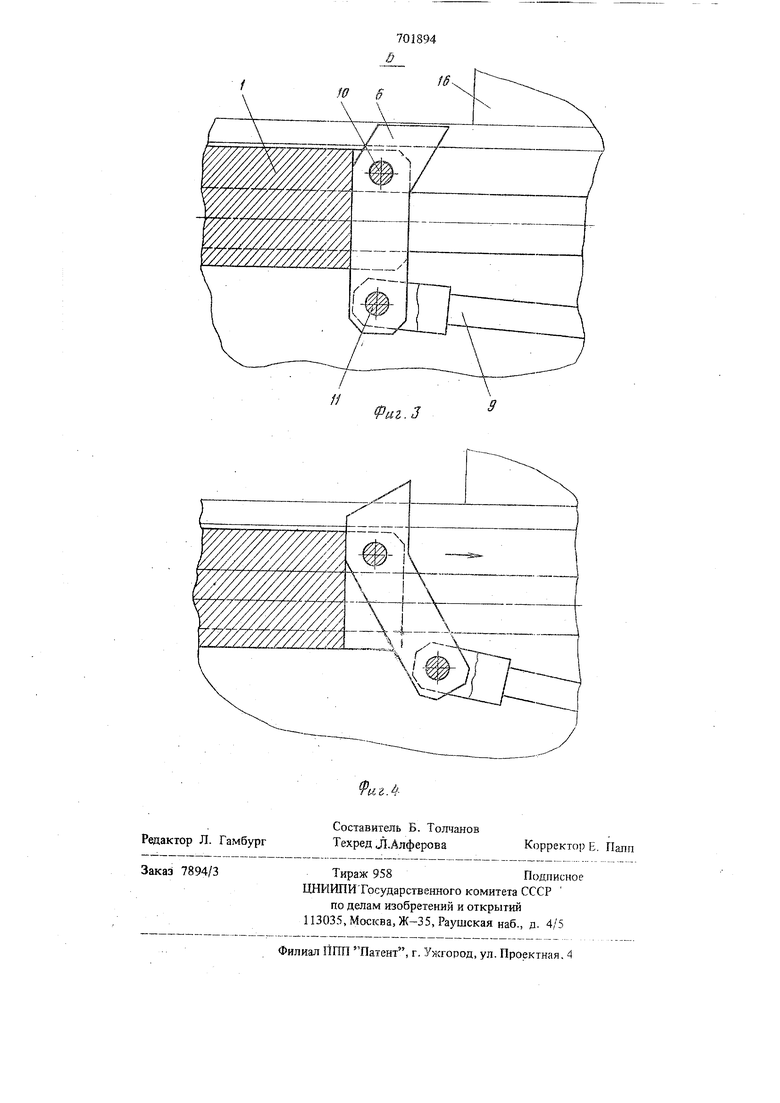
На фиг. 1 изображено устройство в исходном положении, общий вид; на фиг. 2 - разрез А--А фиг. ; на фпт, 3 - укп Б па фиг. 2; на фиг. 4 - голкатоль s рабочем положетп.
Устройство состотгт из каретки 1, перемещающейся по нсггодо1ск 1ым ииилгам 2 (. опорами 3, прикретшеииыми к плите 4 рамы 5, толкателя 6 и привода, выполнепиого в ввде силового -штшщра 7, рычага 8 и шатуна 9. Тол;катель 6 соединен с кареткой 1, являющейся огршнянтелем его поворота, осью 10 и выполиен в виде изопгутого в сторону перемещения издетгия двуплечего рьпгага, 1ф}ием одно его плечо .соединено пальцем 11 с шатуном 9 привода, а другое срезано по выше rLiiocKocrn изделия. Силовой тдалшадр 7 и рычаг 8 шарни но устано1шешл на стойках 12 и 13, закреготен,ных на раме .5. При этом шток 14 силовэго щ лшщра 7 шарни1:1но соединен с рычагом 8, верхний конец которого Соединен с шатуном 9. О нахождении толкателя в исходном наложении сигнализ фует датчик 15, о нахождении изделия 16 на позиции перегрузки сигнализирует, датчик 17.
Устройство работает след аощим образом.
В исходном положении толкатель 6 повернут носредством силового цилиндра 7, рычага 8 и шатуна 9 таким образом, что его верхняя часть утонлена ниже шш-гы 4 рамы 5, а нюкняя упирается в корнус каретки 1 (фиг. 1, 2) Датчик 15 поджат рычагом 8. Подающий конв ей ер (не показан) перемещает изделие 16 по направлению стрелки в положение, показанное на фиг. 2. В зтом положении издегате 16 нажимает датчшс 17 и в нижнюю полость СИЛОЕ.ОГО цилиндра 7 ггостунает сжатый воздух, который перемещает шток 14 в сторону движения изделия 16. В результате движения штока 14 толкатель 6, с помоа1ью рычага S и шатуна 9, поворачивается нп оси 10, его верхняя часть выходит над иитой 4 рамы 5 и уштрается в корпус каретки I, после чего 1ШЧ1шается рабочий ход каретки I в направленгш, указанном стрелкой иа фиг. 4. При зтом верхняя часть
толкателя 6 входит в согфикосновение с изделием 16 и перемещает его .по плите 4 рамы 5 на приемный конвейер (не показан). В конце движения каретки 1 изделие 16 нажимает датчик приемного конвейера (не показан), от которого сигнал поступает на возврат каретки 1 р, исходное положение. Сжатый воздух поступает в верхнюю часть силового цилиндра 7 и перемещает щток 14 в обратную сторону. Толкатель 6 посредством рычага В и щатуна 9 поворачивается на оси 10 и занимает положение, показанное на фиг. 3, после чего нач1-шается холостой ход каретки 1. Когда каретка 1 займет исходное положение (фиг. 2), рычаг 8 нажимает датчик 15 и, если очередное изделие стоит на позиции перегрузки, цикл повторяется.
Формула изобретения
Устройство для передачи изделий с одного конвейера на другой, включающее перегрузочный механизм с толкателем и нривод, о т личающееся тем, что, с целью упрощения конструкции, пoвыщeн ю производительности и надежности работы устройства, перегрузочный механизм выполнен в виде подвижной каретки с ограничителем поворота толкателя, который выполнен в виде двуплечего рычага, щарнщ но закрепленного на каретке при зтом одно его плечо шар1Л1рно соединено посредством шатуна с приводом, а другое выполнено с возможностью взаимодействия с издеггием при рабочем ходе и прохождения под изделием при холостом ходе.
Источншси информации, принятые во внимание при зкспертизе
1.Патент ФРГ Г 1261060, кл. 81 е 8L опублнк. 1968.
2.Патент Японии N 49-30670, кл.83(3) В 7 опублик. 1974 (прототип).
17
Ы
±L
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Конвейерная система для транспортирования изделий на тележках | 1978 |
|
SU791571A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Установка для формования бетонных изделий на поддонах | 1990 |
|
SU1763189A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Трафаретная печатная машина | 1981 |
|
SU1014763A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
А -А
Фи,г. 1
