Изобретение относится к машинам непрерывного транспорта, а именно к устройствам для межоперацио1того транспортирования грузов с передачей грузов с одного подвесного конвейера на другой при подаче их к рабочим местам, находящимся в стороне от трассы конвейера, с возможностью создания подвесных буферных складов.
Известно устройство для передачи штучных грузов с одного подвесного конвейера на другой, включающее грузозахватные приспособления, укрепленные на подвесках, перемещаемых толкателями тягового органа, при этом грузозахватное приспособление одного из конвейеров выполнено в виде качающегося рычага с вилами на конце для взаимодействия с грузом и роликом, перемеииющимся по копирной направляющей 1.
Недостатком данного устройства является сложность и громоздкость конструкции.
Наиболее близким к преачоженному по технической суишости и достигаемому результату является устройство для межоперанионного транспортирования грузов, включающее подающий и приемный подвесные конвейеры с грузозахватными приспособлениягми, укрепленными на подвесках, перемещаемых тяговым органом. При этом каждое груэонесугцее приспособление подающего конвейера выполнено в виде качаюпдегося рычага с вилами на конце для взаимодействия с втулкой грузонесущей серьги н роликом, перемещающимся по копирной направляющей, укрепленной на раме подающего конвейера 2.
Недостатком данного устройства является то, что съем и навеска грузов происходит на участке поворота 1рассы, т.е. в местах самых неблагоприят1П)х с точки зрения динамики, что снижает надежность передачи груда. Кроме того, подвеска груза на грузозахватное приспособление осуществляется консольно, что требует усложнения трассы для него Щтем создания верхней и нижней опор для колес грузозахватного приспособления, что влечет к увеличению габаритов по щирине.
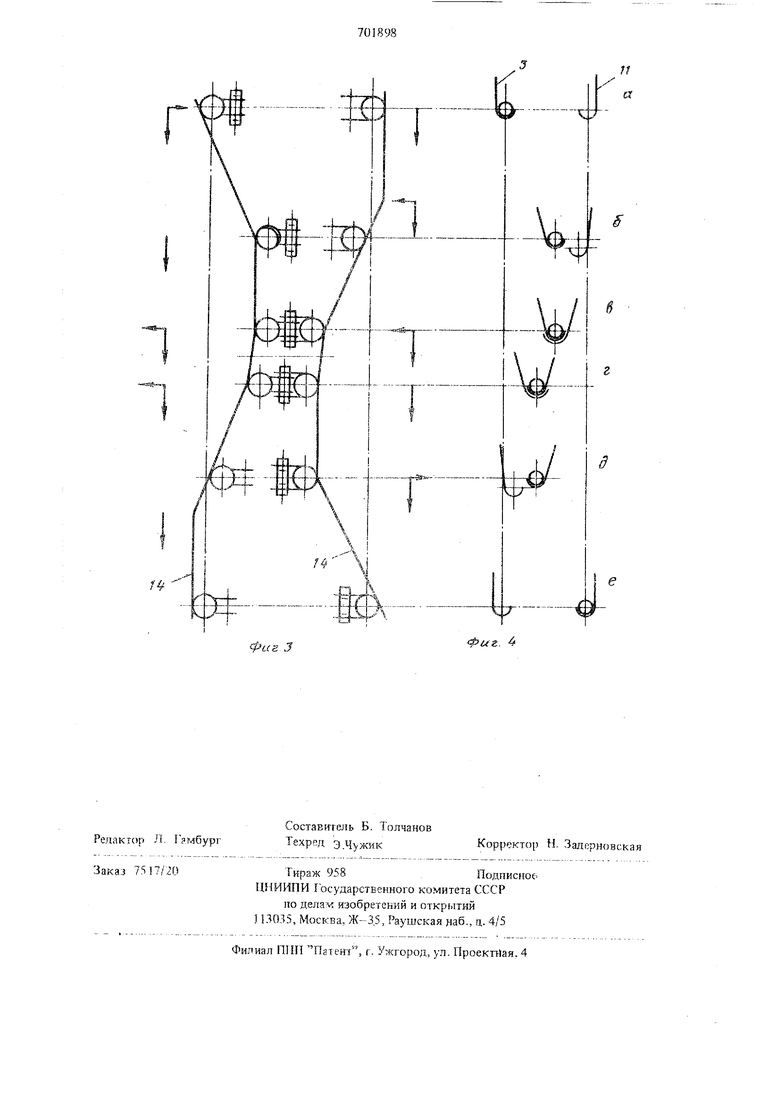
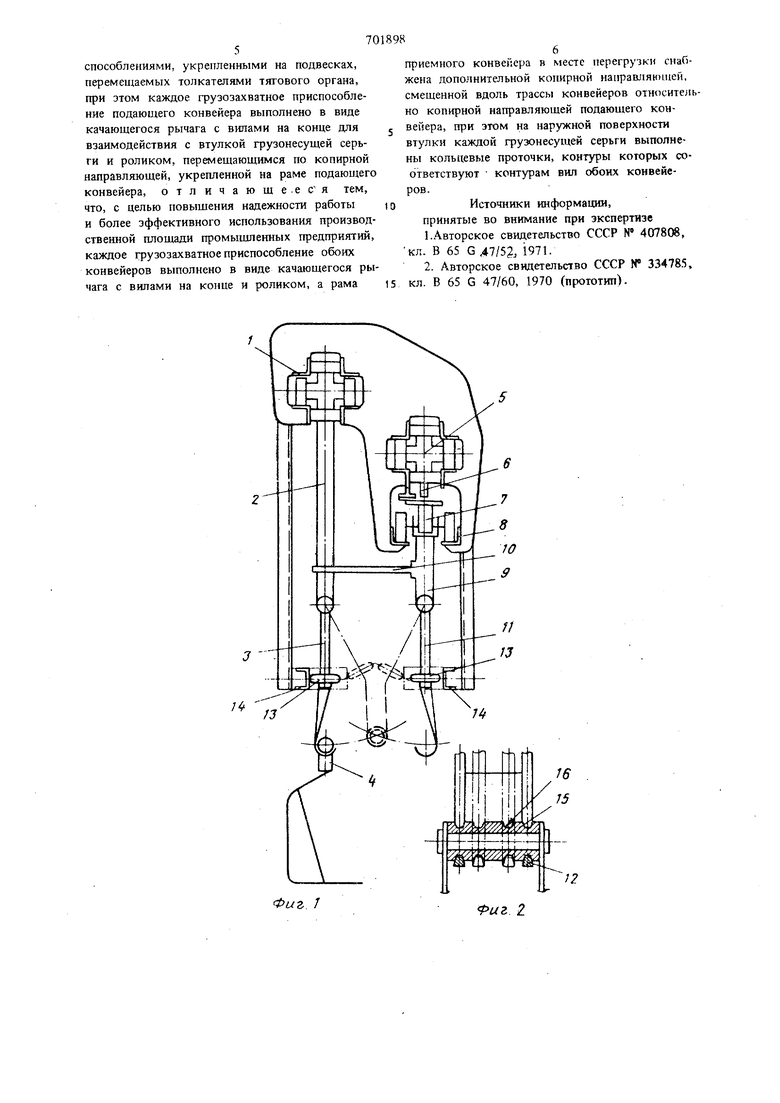
Целью изобретения является повыщение надежности работы и обеспечение более эффекТнвного ислольювания тюкзводствснных пло(дадей пр0 лыишеипьгх предприятий. Эта цель достшается тем, что каждое грузозахватное приспособление обоих конвейеров зькюлнено в виде качающегося рычага с нилами на конце и роликом, а рама приемного конвейера в месте перегрузки снабжена дополнительной когшрной 1 аправляющей, смещен ной вдоль трассы конвейеров относительно копирной направляющей подаюндего конвейера при этом на нар) поверхности втулки Каждой грузонесущей серьги вь иолнены кольцевые н юточки, контуры которых соозвстствуют контурам вил обоих конвейеров На фиг. I схемати1)ески изображено опи1;ь1вае.мое устройство, разрез в месте перегрузки на фиг. 2 - втулка серьги, ггродольный разрез; па фиг. 3 - схема положения качаюи их ск вил в моменты прохождения их но копи рам при передаче груза с подающего конве;йе ра }ia прием1н.1Й, вид сверху; isa фиг. 4 - то же, вид сбоку. Устройство цля межонерационпого транспор ти 5ования грузов содержит подаюпшй конвейе 1 с подвеской 2, включаю11 ей грузозахваткое зг{)испособленис 3 с грузонесущей серьгой 4, яр.чемньгй конвейер с замкнутым тяговым органом - цепью 5 и толкателями 6, uejieMeщающимитележки 7, jio трассам 8. К те.гежкам крепятся гюдвес1чИ 9 с рычагом 10. Г1од 5ески имеют грузозахватное приспособление i 1 ;,ля снятия упомянутой грузонесущей серьги. Грузозахзатпые присГ)Особле 1ия 3 и 1 выполнены н вячс -идестичлых свободно качающихся рычаго с вилами 2 ira концах ч го)изонт; лы ымн роликами 13, к-;;торые к л-гестал iieperp)iKn взаимодейстнугот с ко ир11Ь1Г.,ти jtanpaB-iHKnijHNTH 14. Серьга 4 на KVLIM 12 HaneHjeiKj г .к мощью втулки 15, по наруж ной поверхносги которой выполнены Ko..n,eвые проточки о. Вдогь трасс. гшрегрузочного коивейер.а ;.-тановлень механизм.. останова тележек. Грузопссууци.) конвейер) оборудо ваны системой автоматического адресова1-;ин грузов, (читывашшее устройство (на черзеже по показанх- oнpeдeJtпeт ти груза, котор1-.1Й Н1;обходил4О сиять с иодатщего конвейера на приемный. Трансноргирование 1рузов и передача их с одного 1 ОД11ес;10го конвейера на другой с помощью нр.ел.ложеп.чого устройства осуществ.плется cjiejiymnuiM образом. По сигналу отсчитываюпшго стройства с остарклвки, расположенной на участке с норож HHMii тележ .ами. при гтг-.-гоши толкателя 6 по ipaccc S пычплит че. /, которая за рычаг С по.ч.хнак,икается гюдвеской 2 подаюusero кош ейерЗ 1. На параллаиыгых учасисах трасс подающего и приемною конвейеров свободпокачаю1диеся грузозахватные 1рисп()спбпепия 3 и 11 роликами 13, обкатываясь по КОП1ФПЫМ направляюпнш 14, задают закон движения для вил 12 грузоиесун1ИХ приспособлений 3 и 11, которые 1ередают серьгу 4 с грузом. На фиг. 3, 4 показаны наиболее характерные моменты а, б, в, г, д, е передачи груза при прохождении качающихся рычагов по KOHifpaM. а)Втулка 15 серьги 4 лежит на вилах 12 свободнокачающегося рычага 3 подающего конвейера 1, при этом е.го ролик подощел к копиру, а ролик качающегося рычага 1 перегрузочного конвейера дв15жется вдоль своего . При этом грузозахватные приспособления 3, 11 находятся в вертикальном положении. б)Ролик грузозахватного присг особлен11я 3, на котором висит серьга 4 с грузом, взаимодействуя с копиром, отклоняет вилы в позиш«о, при которой возможен подход к втулке 15 серьги вил 12 своЗоднокачаюпдегося рычага грузозахватното приспособления 11 приемного конвейера, которые в зтот момент 1 ачинагот перемещаться к втулке 15. в)Видь 12 грузозахватного приспособ.чеиия 11 перемещаются к втулке 15 и входят в соответствующие кольцев1.е проточки 16. г)На параллелыц,1Х участках копиров вилы 12 свобод1 Окача ощихся рычагов грузозахвагных приспособлений 3, 11 смепдаются в положение, при котором воиможеи свободный вь.ход вил 12 рь1Чагов грузозахр.итпого приспособленин 3 из-под вту.чки 15 серыи 4 (иа некотором расстоянии по другую сторону оси), и втулка серьги перекатывается ; вил 12 грузозахватного приспособления 3 на вилы 12 грузозахватного приспособления П. д)Освобожденные липь 12 рр)1чага грузозахватного пр -;способлег;и 3 iio/iaioHiero конг ейера 1 отводятся из-под втулки серьги в исходное вертикальное положение. е)Вилы 12 с грузом г ычага грузонесупшго приспособления 11 мрипимакч исходное .-кение. Передачи серьги 4 с Г1)узом заверти ена. Процесс передачи серьги с руз()м с конвейера 5 на конвейер 1 происходит анало1И1)1.ым образом. Фор .м у л а и 3 с б р е т с н и я Устройство для ,(Мнп|-о ipanciiopтирования грузов, включщтцее подякици и (риемный ко вейеры ;; гр-.-ючвхпа-.ными приспособлениями, укрепленными на подвесках, перемещаемых толкателями тягового органа, при этом каждое грузозахватное приспособление подающего конвейера выполнено в виде качающегося рычага с вилами на конце для взаимодействия с втулкой грузонесущей серьги и роликом, пераиещающимся по копирной направляющей, укрепленной на раме подающего конвейера, отличающе.еся тем, что, с целью повыщения надежности работы и более эффективного использования производственной площади промышленных предприятий, каждое грузозахватное приспособление обоих конвейеров выполнено в виде качающегося рычага с вилами на конце и роликом, а рама
приемного конвейера в месте перегрузки снаОжена дополнительной копирной направляющей, смещенной вдоль трассы конвейеров относительно копирной направляющей подающего конвейера, при этом на наружной поверхности втулки каждой грузонесущей серьги выполнены кольцевые проточки, контуры которых соответствуют контурам вил обоих конвейеров.
Источники информации,
принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 407808, кл. в 65 G 47/52. 1971.
2. Авторское свидетельство СССР № 334785,
кл. В 65 G 47/60, 1970 (прототип).
Фиг. /
иг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУ301В | 1972 |
|
SU334785A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1446062A1 |
| Устройство для перегрузкипОдВЕСОК | 1979 |
|
SU810585A1 |
| Установка для вертикального перемещения штучных грузов | 1988 |
|
SU1671556A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1973 |
|
SU405777A1 |
| Подвесной сортировочный конвейердля шТучНыХ гРузОВ | 1979 |
|
SU804008A1 |
| Устройство для передачи подвесок с одного грузонесущего конвейера на другой | 1978 |
|
SU753739A1 |
| Подвесной конвейер | 1977 |
|
SU642242A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1330047A1 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1971 |
|
SU449857A1 |