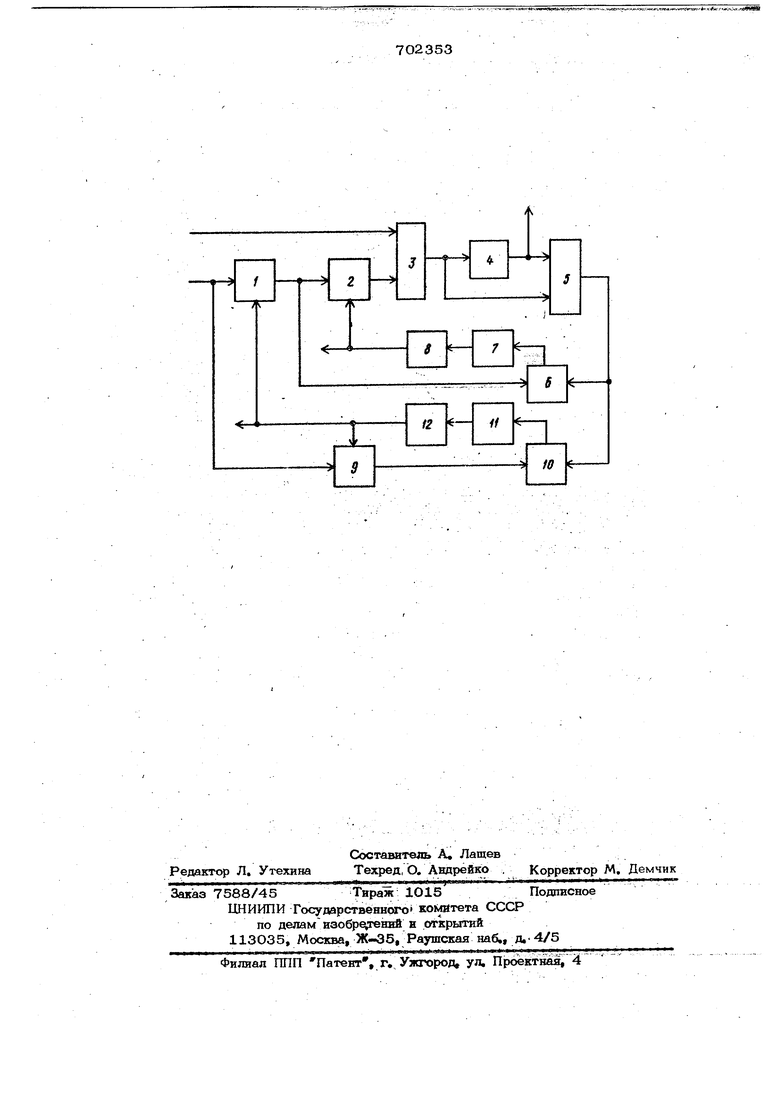
(54) УСТРС СТВО ДЛЯ СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ реднения 7, первого блока управления 8, второго фильтра 9, третьего блока умножения 10, третьего блока усреднения 11 и второго блока управления 12. Устройство работает следующим об- разом . Входной сигнал поступает на вход фильтра 1 с импульсной характеристикой произвольного вида li(t,T.)« На вы- .. .ч. ходе будет сигнал lAtJ r-iiCC.TJMt-iCJdt: о .- ; : -i который поступает на первый вход блока умножения 2 и на один из входов блока, умножения 6, С выхода блока умножения 2 сигнал подается на один вход сумматора 3, на другой вход которохч) поступа сигнал yC/t). С выхода сумматора 3 сигнал X (t ) - ) на входы сумматора 5 (на одан непосредственно, а на другой через блок усреднения 4), С выхода сумматора 5 сигнал X Cty-XCtVK a -NVtxCtVKX ttll . NictVKTtictj)xa-t)at:, . О . ,. где ЛЕЗоператс усреднения: xCt)Xa)-N CxttV:l; )).; .,.. . .-., поступает на вход блока умйоЖения 6, с выхода которого через блок усреднения 7 сигнал . )-KAtv ct)-. , -;К l-h (TsTix а-г)х Vrtiecj) xtt 3; поступает на блок управления 8 и с йего на второй вход бжжа умножения 2 , гщз сигнал i ) умножается на коэффициент К- При этом коэффициент К изм няйтся до тех пор, пока не будет вьшол няться условие ,о: .:v4 :./-: Однбррбменно с этим входной сигнал X (t) поступает на вход .второго ( импульсной хара1стеристикай ti (СД) с выхода которсго сигнал z.(t)«Th (tr,T xrt--c)d-c о . . подается на одан из юсодов блока умножения 10, на другой вход которого 534 поступает сигнал Z2(t), с выхода которого через блок усреднения 11 сигнал Z5tt)(t) -.кТъ{-с,т)ха-г)ас Л;С1г,т)х( «Jо оступает на блок управления 12 и с него оступает на управляющие входы фильтров и 9, При этом параметр Т изменяется о тех пор, пока на выходе блока усредения 11 не будет выполняться условие Z5-(t)0. Предложенное устройство реализует квйвалёйтную линейную модель вида ,T)x(t-ridi;. причем ti ) и Ji.) ( ) - произ- вюльные импульсные характеристики соответственно liepSoro и второго фильтров нз класса физически реализуемых устойчивых фильтров. При этом должно вьшолнйт й условие . |,)..1рШ, : При выполневви условия 2я,С)О,15() -О имеет место адекватность модели объекту в вмысле критерия минимума ма« тематического озкидания квафата разнооя ти выходных сигналов объекта ( -fc ) в линейной модели ) A f :i4tfcb4 t).h,nH Моясно йькйза,, что при схютветству-1 юшем вьтборе параметров блоков усре; нения 7 и 11 и блоков управления 8 и 12 процесс уравновешивания будет сходяшвмСя. Таким образом, изменение одной связи В предлагаемом устройстве по сравнению с прототипом расширяет функциональные ёозмбжнбсги устройства, зй стет повыше-i ния точности (степени адекватности) идентификации исследуемыхреальных объч esTOB, Формула изобретения Устройство дия статистической лине- ajp aainm дшамвческих объектов по авт,; свид, № 5S8027, отличающе-. ее я тем, что, с целью повышения точности работы устррйства, вход первого jOtVpa соедЕвёв со «ходом второго фвльтрв.
7О2353
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для статической линеаризации динамических объектов | 1975 |
|
SU598027A1 |
| Устройство для определения @ -х моментов импульсной переходной функции | 1986 |
|
SU1388909A2 |
| Устройство для определения характеристической функции | 1981 |
|
SU983725A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Устройство для моделирования динамических процессов в системах автоматического управления | 1979 |
|
SU866566A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Способ моделирования целенаправленной деятельности нейрона и устройство для его осуществления | 1989 |
|
SU1737468A1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ИМПУЛЬСНО-КОДОВОЙ МОДУЛЯЦИИ - ДЕМОДУЛЯЦИИ СИГНАЛОВ | 2011 |
|
RU2446558C1 |
| Устройство для определения параметров модели структурной функции | 1983 |
|
SU1130852A1 |