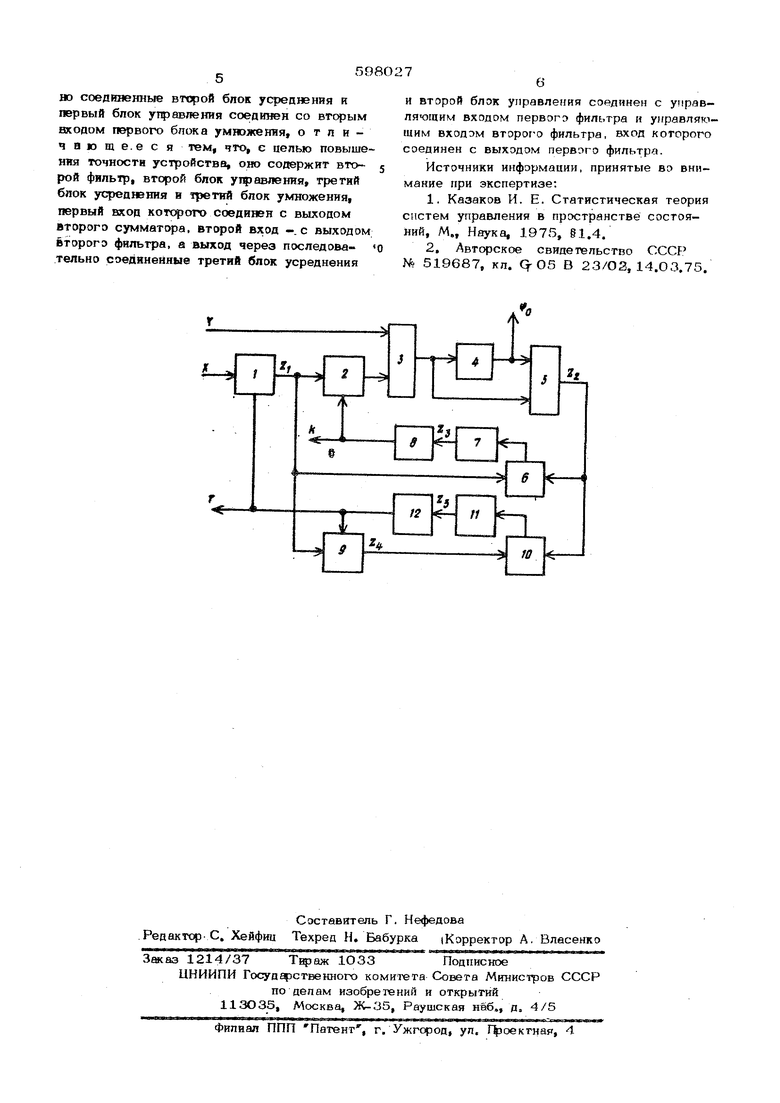
(54) УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ ДИ11АМИЧЕСКИХ ОБЪЕКТОВ диненные третий блок усреднения и второй блок управления соединен с управляющим входом аервого фильтра и управляющим вхо-« дом второго фильтра, вход которого соединен с выходом первого фильтра. На чертеже представлена бпок-схйма описываемого устройства Устройство состоит из 1юрвого фильтра Д, первого блока умножения 2, первого сум. матер а 3, гюрвого блока усреднения 4, второго суммат а 5, второго блока умножения 6, второго блока усредшния 7, первого бло ка управления 8, второго фильтра 9, фетьего блока умножения 1О, третьего блока усреддания 11 и второго блока управления 12. Устройство работает следующим образом. Входной сигнал поступает на вход фильтра 1 с передаточной ФyflкциeйW(p)фT)и со ответствукуцей импульсной х актерисгикой Kj-r fV где Т - регулируемая постоянная фильтра. .J Thhhli-f if На вьосоде будет cnrHan- lW который поступает на первый вход блока умножения 2, в а один из ЕКОДОВ блока умножения 6 и на вход фипыра 9. С выхода блока умножения 2 сигнал поступает на один вход сумматора 3, на {фугвй вход которого rrocry пает сигнал Y(i) . С выход асумм агор а 3 Сигнал Y (i) - KZjfi) поступает на входы сумматс а 5, на один - непосредсо венно, в на другой - через блок усредвення 4, с выхода сумматора 5 сигнал Z.2(t)Y(t)-KZ(-l)MlY(i)-k2;jfl)I-Y{i)-Kfh|b)X(i-t)dty о где М - оператор усредгюния, x(i).x(i)-Mlx(i)Lv(i)Y(t)-M v{iOti поступает на другой ЕКОД блока умножения в, с выходе которого через блок усредвэшя 7 сигнал г 24(i)(i)-Kjhlt)i((i-t)(t)X(i-t)dt} поступает на блок управления & и с него на второй вход блока умножения 2, где сигнал 2i ( i: ) умножается на коэффициент К, при этом коэффициент К изменяется до тех пор, пока не будет выполняться условие. ZJi)0 Одновременно с этим сигнал Z.C-i) и сиг нал Zi(l с выхода фильтра 9, имеющего передаточную характеристику Wj(p)-- |зТ/|1 рТ и соответствующую импульсную характерис 1 4 H,U) поступает на вход блока умножения 10, с выхода которого сигнал через блок усреднения 11 и блок управления 12 поступает на утфавляющие входы фильтров 1 и 9, при этом пвраметр Т изменяется до тех пор, пока на выходе блока усреднения II Hs будет выполняться условие :25ii)0 Настоящее устройство реализует экЬивй лентную линейную модель вида ) f.(tjT)X(t-t)t, где k {t,T )1/т)6- импульсная харекгеристика модели и первого фильтра; Т - ператиетр настройки фильтров j(peryпвруемая постоянная )| К - статистический коэффициент усялешя по случайной состаы1шо1Ц8й1 W „ статистический коэффициент усилелешя по математическому ожиданию, Гфи выполнении условйй2д{1) О H2i(t)0 йА®ет место адекватность модели объекту в кригерия минимума математического ожидания квадрата разности выходньис сигн. пов объекта Y{i.} и .линейной модели :Y«(t) - (i)-Y(i). Пфаме-фы блоков усред1 ния 7 и 11 и бноков управления 8 и 12 можно выбрать таким образо, чтобы процесс уравновешивания был сходящимся, этом канал уравновешивания пфамеара Т будет более инерцйокным, чем канйп уравновешивания пфаметра К , Таким образом, присоединен ® к извест ноглу устройству двух фильтров с передаточными функциями W| ( р) и Wg (,р) , блока умножения, блока усреднения н блока.управления значительно расширяет функцнональвые возможности устройства для получения пишйной модели, удобной для дальнейшего исследования ш.только вэлинейных безинер аионных обшктов но и инерционных линейных и нелинейных динамических объектов. Фофмула изобретения Устройство для статистической линеариза- пни динамических объектов, содержащее первый фйпьтр, вь1ход которого через первый блок умножения соеди1жн с одним из входов о сумматора, выход которого непосредст5№нно и через первый блок усреднения соединен с соответствующими входами второго сумматор Bj выход которог-о соединен с первым входом второго блока умножения, вход которого соединен с выходом первого фильтра, а выход через последоватепьво соединенные второй блок усреднения и первый блок управления соединен со вторым входом первого блока умножения, о г л и чнюще.еся тем, что с целью повышения точности устройства, оно содержит второй фильтр, второй блок утфавлення, третий блок усреднения н третий блок умножения, первый вход соединен с выходом второго сумматора, второй вход -.с выходом второго фильтра, а выход через последовательно соединенные третий блок усреднения
и второй блок управления соединен с управляющим входом первого фильтра н управляющим входом второго фильтра, вход которого соединен с выходом первого фильтра.
Источники информации, принятые во внимание гфи экспертизе;
1.Казаков И. Е. Статистическая теория систем управления в пространстве состояний, М., Наука, 1975, 81.4.
2,Авторское свидетельство СССР
№ 519687, кл. 0-05 В 23/03,14.03.75.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| "Устройство для статистической линеаризации динамических объектов | 1978 |
|
SU702353A2 |
| Устройство для определения @ -х моментов импульсной переходной функции | 1986 |
|
SU1388909A2 |
| Регулирующее устройство | 1980 |
|
SU928301A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Устройство для определения коэффициентов статистической линеаризации нелинейных динамических систем | 1986 |
|
SU1322329A1 |
| Устройство для статистической индентификации | 1978 |
|
SU746578A1 |
| Устройство для оценки производной корреляционной функции | 1985 |
|
SU1348865A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
