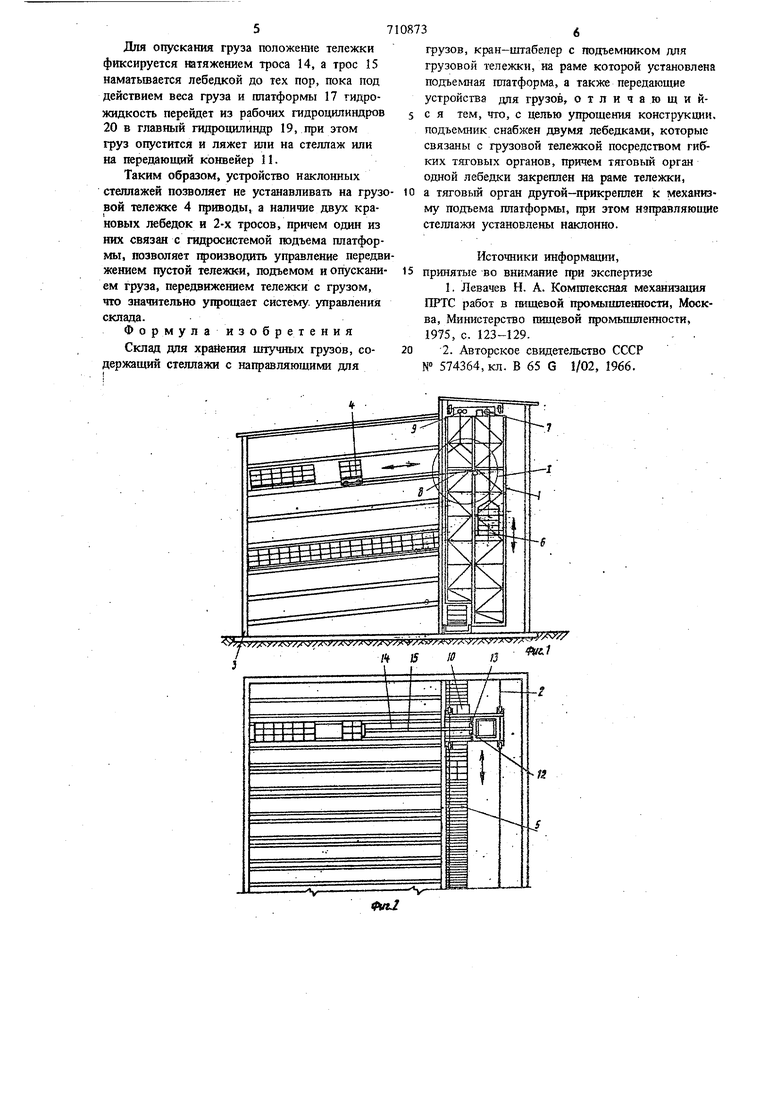
(54) СКЛАД ДЛЯ ХР.ЛНЕНИЯ ШТУЧНЫХ ГРУЗОВ 17, шарнир но гфикрепленная рычагами 18 к раме 16, таким образом, что она может приподнязгься иадстеллажами 3 под действием гидропривода. На раме 16 устаиовлена система гидропривода и подъема платформы 17, состоящая из главного гидроцилиндра 19, соединенного с лебедкой подъема 13 тросом 15 и с рабочим гидродилиндрами 20 трубопроводами 21. Рабочие гидроцилиндры 20 шарнирно прикреплены к рычагам 18. На подъемнике 6 установлен передающий конвейер 22. На стеллажах закреплены наклонные направ ляющие 23 для груза и 24. Работа склада осуществляется следующим образом. Штабелер 1 имеет возможность передвигаться вдоль, стеллажей 3, подъемник 6 может опускаться и подниматься с грузом, подъемник 8 может опускаться и подниматься с тележкой 4. Перед загрузкой штабелер 1 устанавливаетс в исходное положение ; подъемник 6 опускается до самого низа, подъемник 8 устанавлива ется напротив загружаемой ячейки, тележка 4 при этом располагается под передающим конве йером 11 (см. фиг.1). Рабочий цшсл погрузки состоит из следующих фаз; -доставка груза на передающий конвейер 22 конвейером 5 или электропогрузчиком; - перемеидение груза подъемника 6 на высоту загружаемой ячейки; -перегрузка груза с конвейера 22 на кон вейер И; -небольшой подъем груза над конвейером И на платформе 17; . -передвижение 4 с грузом 24 внутрь , стеллажа 3 по направляющим 23; -опуска}ше платформы 17 с грузом 24 и установка 24 на стеллаж; -возвращение тележки 4 на подъег ганк 8 -опускание подъемника 6 вниз. После зтого цикл повторяется. Движение тележки 4 и подъем-опускание подъемника 8 производится одновремен Ю. Перед рдагрузкой стеллажей штабелер 1 устанавливается в исходное положение; подъе ник 8 устанавливается напротив разгружаемой ячейки, тележка 4 находится на подъемнике с опущенной платформой 17 (см. фиг .2), подъемник 6 поднимается и устанавливается на одном уровне с подъемником 8. Рабочий цикл погрузки состоит из следую.щих фаз: - передвижение тележки 4 внутрь ячейки стеллажа и установка ее под грузом 24; 34 -небольшой подъем груза над стеллажом (см.фиг.2) на платформе 17; -передвижение тележки 4 с грузом 24 а подъемник 8; - опускание груза на передающий конвеер 11; -перемещение груза с конвейера 11 на онвейер 22; -опускание груза на подъемнике 8 вниз; -перегрузка груза с подъемника на конейер 5 или на электропогрузчик; -подъем подъемника 6 в исходное положеие. После этого Щ1кл повторяется. Движение тележки внутрь ячейки н опускаие подъемника-лифта производится одновременно . Лебедка 12 через трос 14 осуществляет управление передвижением пустой тележки 4. Вниз по наклонным направляющим 23 тележка 4 передвигается под действием силы тяжести, при этом лебедка 12 работает в тормозном режиме, удерживая тележку от разгона. Остановка тележки производится по команде оператора, при этом лебедка 12 останавливается. -Движение тележки 4 в направлении штабепера 1 передается через трос 14 лебедкой 12, которая в этом случае работает под нагрузкой, остановка тележки также производится по команде оператора. При помощи лебедки подъема 15 производятся следующие операции: 1.Подъем груза на платформе 17; 2.Опускание груза на платформе 17; 3.Передвижение тележки с грузом внутрь стеллажа с подъемника 8 при погрузке; 4.Передвижение тележки с грузом из стеллажа на подъемник 8 штабелера 1 при разгрузке . Подъем платформы при подъеме груза над передающим конвейером 11 или над стеллажом 3 производится при помощи гидросистемы. Лебедка 13 через трос 15 вытягивает шток главного гидроцилиндра 19, гидрожидкость из которого по трубопроводам 21 переходит в рабочие гидроцилиндры 20, при этом штоки рабочих гидроцилиндров выдвигаются, нажимая на рычаги 18 и платформа 17 поднимается. В главном гидроцилиндре ход поршня значительно длиннее, чем у рабочих гидроцилиндров, а дааметр значительно меньше. Этим создается усиление подъема значительно большее, чем усилие в канате 15 и меньше, чем усшше, необходимое для движения тележки в противоположную сторону наклона. Таким образом, при натяжении саната 15 происходит подъем груза.
Для опускания груза положение тележки фиксируется натяжением троса 14, а трос 15 наматьшается лебедкой до тех пор, пока под действием веса груза и платформы 17 гидрожидкость перейдет из рабочих гидроцилиндров 20 в главный гидроцилиндр 19, при этом груз опустится и ляжет или на стеллаж или на передающий конвейер 11.
Таким образом, устройство наклонных стеллажей позволяет не устанавливать на грузо вой тележке 4 приводы, а наличие двух крановых лебедок и 2-х тросов, причем один из них связан с гидросистемой годъема платформы, позволяет гфоизводить управление передвижением пустой тележк, подъемом и опускалием груза, передвижением тележки с грузом, что значительно упрощает систему, управления склада.
Формула изобретения
Склад для храйения штучных грузов, содержащий стеллажи с направляющими для
грузов, кран-штабелер с подъемником для грузовой тележки, на раме которой установлена подъемная платформа, а также передающие устройства для грузов, отличающийс я тем, что, с целью упрощенна конструкции. подъемник снабжен двумя лебедками, которые связаны с грузовой тележкой посредством гибких тяговых органов, причем тяговый орган одной лебедки закреплен на раме тележки, а тяговый орган другой-прикреплен к механизму подъема платформы, при этом направляющие стеллажи установлены наклонно.
Источники информации, принятые во внимание при экспертизе
1.Левачев Н. А. Комплексная механизация ПРТС работ в пищевой промыщленности, Москва, Министерство пищевой промьшшешгости, 1975, с. 123-129.
2.Авторское свидетельство СССР № 574364, кл. В 65 G 1/02, 1966.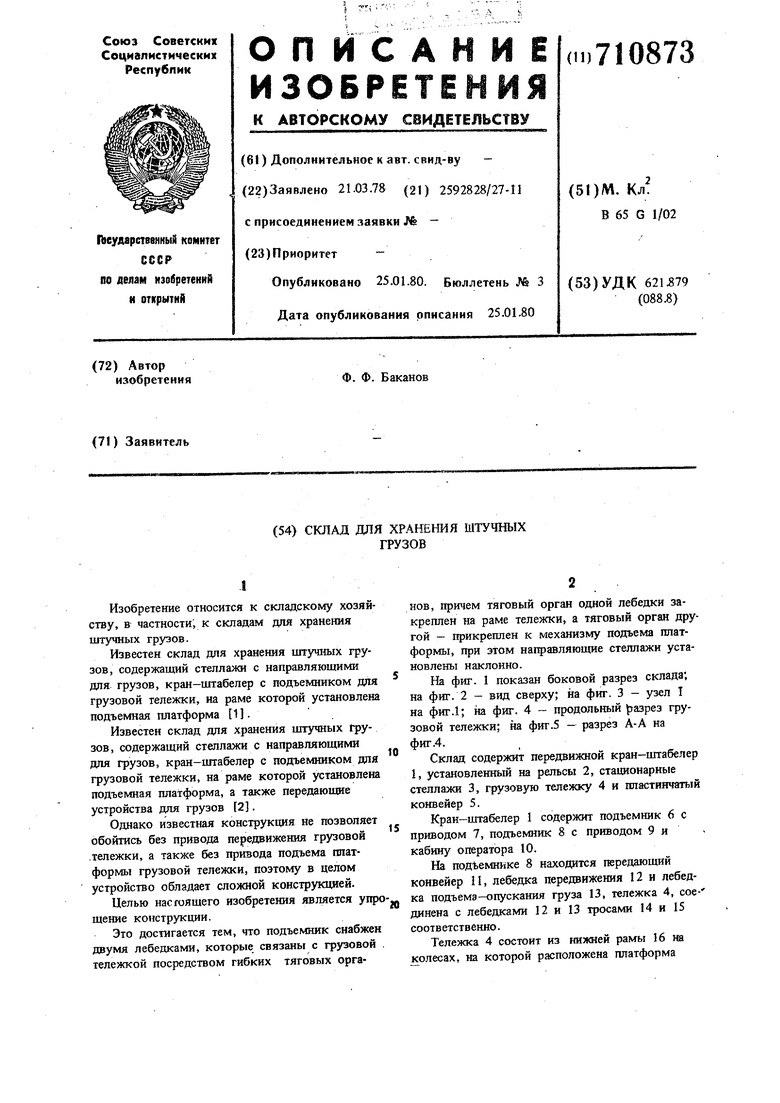

| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для подъема и транспортировки грузов | 1977 |
|
SU676534A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Устройство для ориентации передаточной тележки стеллажного крана-штабелера относительно межстеллажного прохода | 1989 |
|
SU1705197A1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| КОМПЛЕКТОВОЧНЫЙ КРАН —ШТАБЕЛЕР | 1974 |
|
SU380105A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1972 |
|
SU348465A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |

