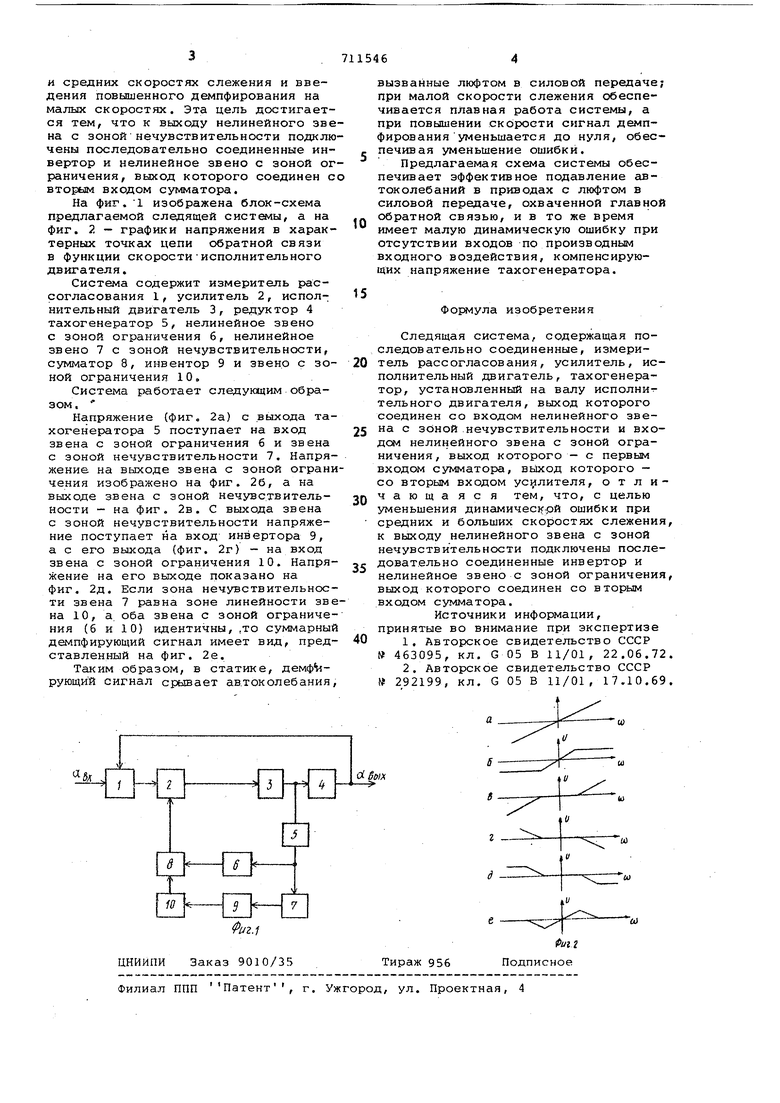
Изобретение относится к следящим приводам с нелинейнЕлми обратными связями . Известна следящая система; содержащая последовательно соединенные эле мент сравнения, сумматор, усилитель и исполнительный двигатель, а также тахогенератор, установленный на валу двигателя. Система содержит также управляемый нелинейный элемент, первый вход которого соединен с выходом тахогенератора, второй - с источником опорного напряжения, управляемый вход подключен к выходу усилителя, а выхсд связан со входом сумматора. Это позволяет увеличить длавность ра боты системы на малых скоростях 1. Недостатком этой системы является то, что ее структура построена в пред положении пропорциональности выходного напряжения усилителя скорости отработки системы. Это справедливо лишЗ для небольшого класса приборных маломощных следящих систем. В мощных следящих системах пропорциональность между выходным напряжением усилителя и скоростью обработки нарушается за счет влияния статического момента нагрузки и местных обратных связей.Эта пропорциональность отсутствует также в следящих системах с астатизмом второго порядка. Из известных следящих систем наиболее близкой по структуре является система 2. Эта система содержит последовательно соединенные измеритель рассогласования, усилитель, силовой привод, тахогенератор на валу исполнительного двигателя, выход которого соединен со входом нелинейного звена с зоной нечувствительности и входом нелинейного звена с зоной ограничения, выход которого связан с первБм вхсдом сумматора, выход которого связан со вторым входом усилителя. В ЭТОЙ системе на малых скоростях обратная связь является положительной, а при средних и больших - отрицательной. В связи с этим такая схема принципиально не может устранить автоколебания, вызванные люфтом в силовой передаче и ее упругостью, в то же время на средних и ббльших скоростях, система имеет дополнительную динамическую ошибку, вызванную сигналом тахогенератора, что и является ее недостатком. Целью изобретения является уменьшение динамической ошибки на больших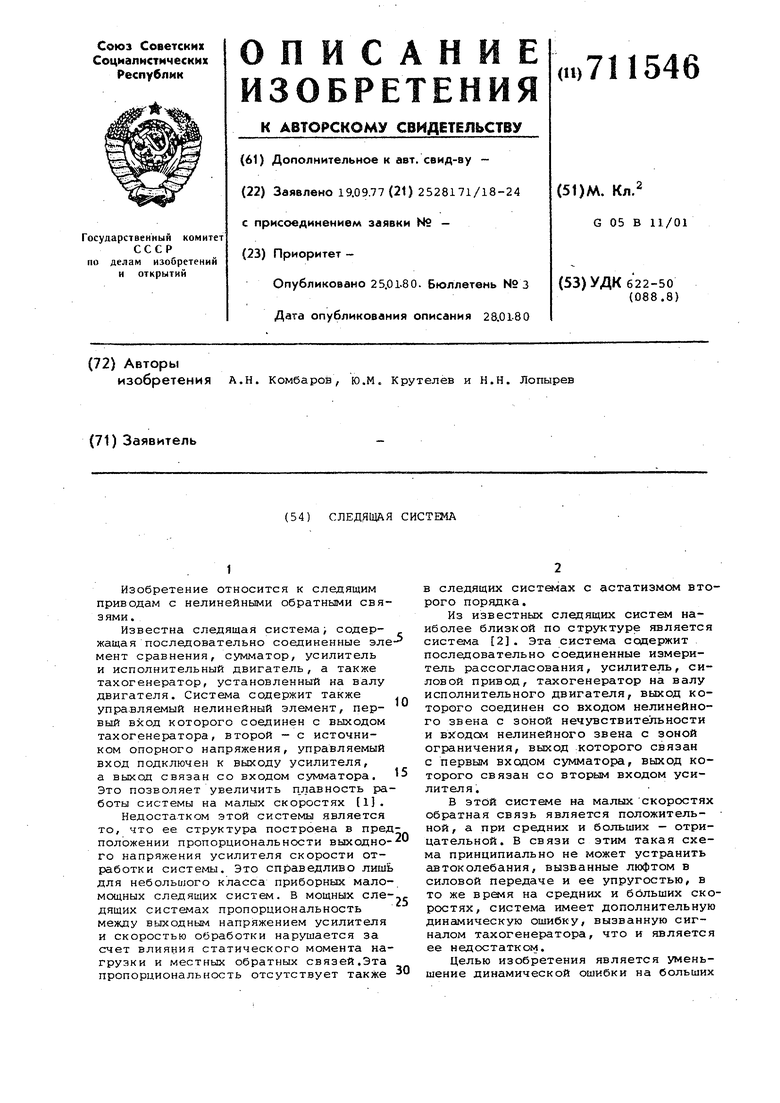
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU993202A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292139A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| БИБЛИОТЕЧКА | 1972 |
|
SU347736A1 |
