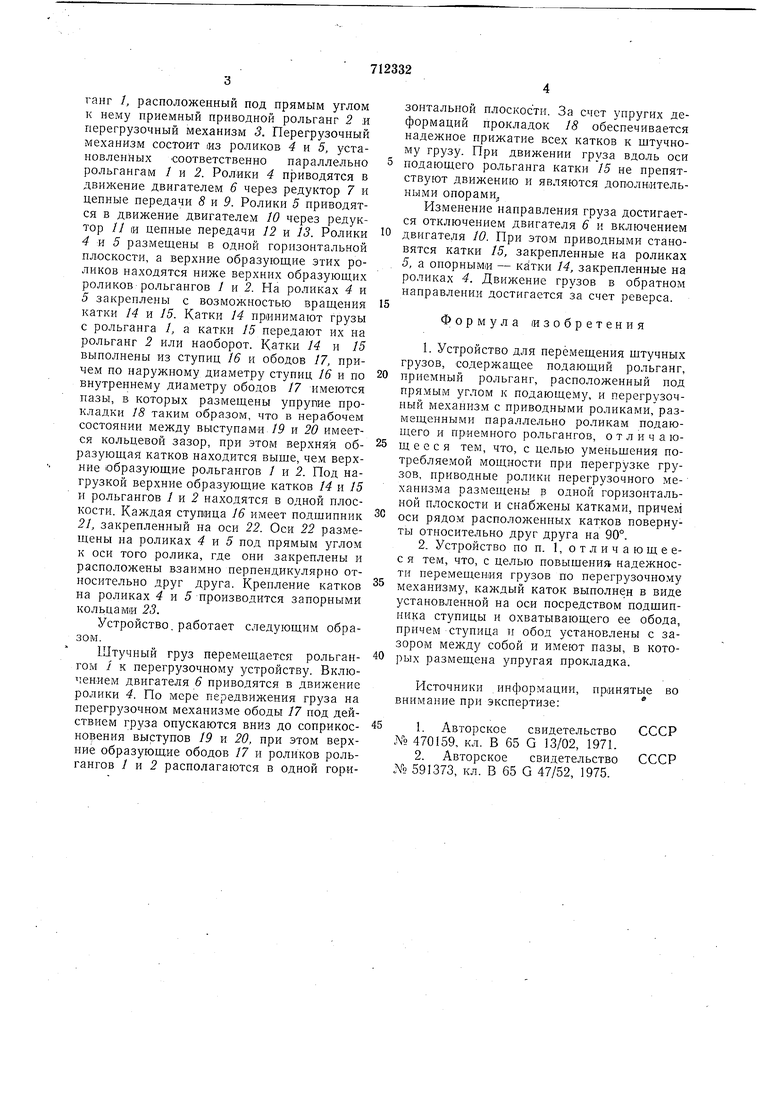
ганг 1, расположенный под прямым углом к нему приемный приводной рольганг 2 и перегрузочный механизм 3. Перегрузочный механизм состоит «з роликов 4 и 5, установленных соответственно параллельно рольгангам 1 и 2. Ролики 4 приводятся в движение двигателем 6 через редуктор 7 и цепные передачи 8 н 9. Ролики 5 приводятся в движение двигателем 10 через редуктор // и цепные передачи /2 и 13. Ролики
4и 5 размещены в одной горизонтальной плоскости, а верхние образующие этих роликов находятся ниже верхних образующих роликов рольгангов / и 5. На роликах 4 и
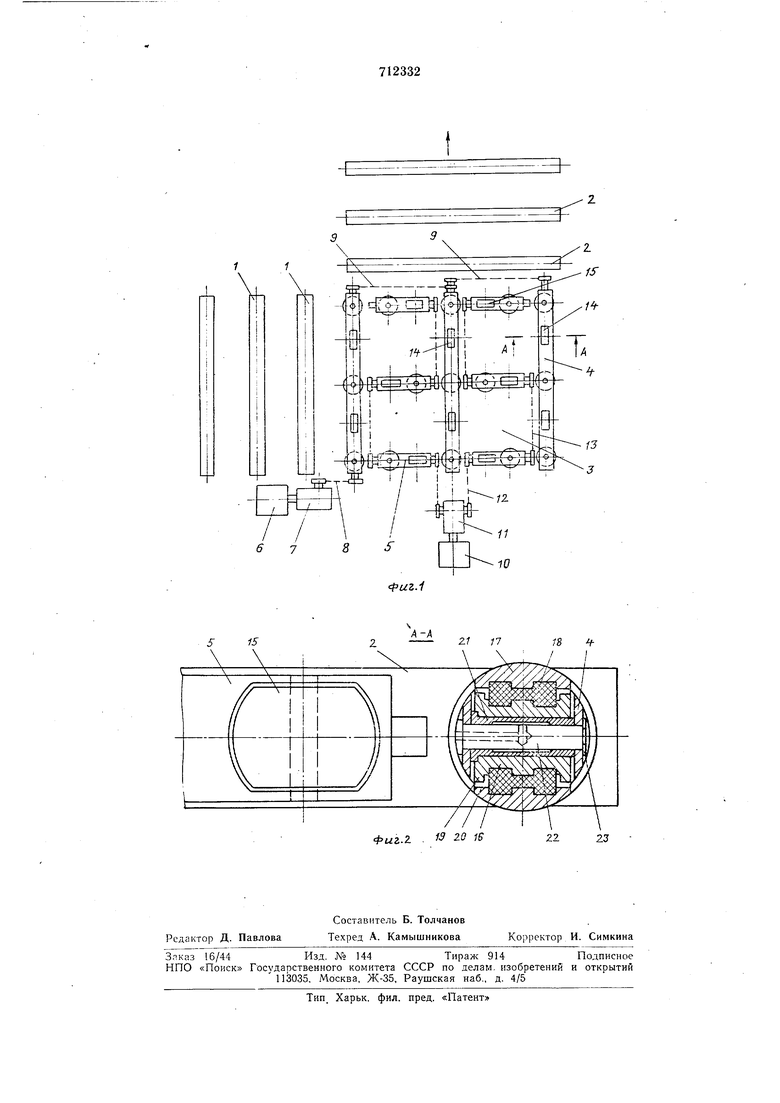
5закреплены с возможностью вращения катки 14 и 15. Катки 14 принимают грузы с рольганга 1, а катки 15 передают их на рольганг 2 или наоборот. Катки 14 и 15 выполнены из ступиц 16 и ободов 17, причедМ по наружному диаметру ступиц 16 и по внутреннему диаметру ободов /7 имеются пазы, в которых размещены упрулие прокладки 18 таким образом, что в нерабочем состоянии между выступами /Р и 20 имеется кольцевой зазор, при этом верхняя образующая катков находится выще, чем верхние образующие рольгангов / и 2. Под нагрузкой верхние образующие катков 14 и 15 и рольгангов / и 2 находятся в одной плоскости. Каждая ступица 16 имеет подщипник 21, закрепленный на оси 22. Оси 22 размещены на роликах 4 и 5 под прямым углом к оси того ролика, где они закреплены и расположены взаимно перпендикулярно относительно друг друга. Крепление катков на роликах 4 и 5 производится запорными кольцами 23.
Устройство, работает следующим образом.
Штучный груз перемещается рольгангом 1 к перегрузочному устройству. Включением двигателя 6 приводятся в движение ролики 4. По мере передвижения груза на перегрузочном механизме ободы 17 под действием груза опускаются вниз до соприкосновения выступов 19 и 20, при этом верхние образующие ободов 17 и роликов рольгангов 1 11 2 располагаются в одной горизонтальной плоскости. За счет упругих деформаций прокладок 18 обеспечивается надежное прижатие всех катков к щтучному грузу. При движении груза вдоль оси подающего рольганга катки 15 не препятствуют движению и являются дополнительными опорами,.
Изменение направления груза достигается отключением двигателя 6 и включением
двигателя 10. При этом приводными становятся катки 15, закрепленные на роликах 5, а опорными - катки 14, закрепленные на роликах 4. Движение грузов в обратном направлении достигается за счет реверса.
Формула изобретения
1.Устройство для перемещения щтучных грузов, содержащее подающий рольганг,
приемный рольганг, расположенный под прямым углом к подающему, и перегрузочный механизм с приводными роликами, размещенными параллельно роликам подающего и приемного рольгангов, отличающ е е с я тем, что, с целью уменьщения потребляемой мощности при перегрузке грузов, приводные ролики перегрузочного механизма размещены р одной горизонтальной плоскости и снабжены катками, причем оси рядом расположенных катков повернуты относительно друг друга на 90°.
2.Устройство по п. 1, отличающеес я тем, что, с целью повыщени надежности перемещения грузов по перегрузочному механизму, каждый каток выполнен в виде установленной на оси посредством подщипника ступицы и охватывающего ее обода, причем ступица н обод установлены с зазором между собой и имеют пазы, в которых размещена упругая прокладка.
Источники .информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР Хо 470159, кл. В 65 G 13/02, 1971.
2. Авторское свидетельство СССР 591373, кл. В 65 G 47/52, 1975.
Л
I
78 f
12.
Tly
10
uz.i
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки конвейера штучными грузами | 1980 |
|
SU945019A1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1979 |
|
SU897662A1 |
| Перегрузочное устройство | 1980 |
|
SU908714A1 |
| Устройство для перемещения штучных грузов во взаимно-перпендикулярных направлениях | 1982 |
|
SU1085897A1 |
| Устройство для передачи штучных грузов | 1980 |
|
SU906856A1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1981 |
|
SU988716A1 |
| Устройство для транспортирования штучных грузов | 1979 |
|
SU789354A1 |
| Подъемно-перегрузочное устройство | 1986 |
|
SU1460000A1 |
| Перегрузочное устройство | 1982 |
|
SU1033408A1 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1986 |
|
SU1419952A1 |
A-A
Фиг.2.
