(54) ПОДЪЕМНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ
I
Изобретение относится к подъемно-транспортной технике и может быть использовано для передачи штучных грузов с одного конвейера на другой, расположенных на разных уровнях перпендикулярно один другому, или для перегрузки с транспортного средства на стеллажи, оборудованные рольгангами.
Известно подъемно-перегрузочное устройство для штучных грузов, содержащее П-образную раму с тросовым механизмом подъема, на котором закреплены грузовая рама с приводными роликами и механизм поворота грузовой рамы 1.
Однако известное устройство имеет низкую производительность за счет дополнительной операции по вращению груза при перестановке с конвейера на конвейер.
Наиболее близким к изобретению по тех нической сущности является подъемно-перегрузочное устройство для щтучных грузов, содержащее основание и раму, включающую-две секции с приводными роликами, одна из которых связана с основанием посредством четырехзвенного механизма типа «нюренбергских ножниц и с приводом подъема-опускания, при этом приводные ролики каждой секции расположены во взаимно перпендикулярных плоскостях 2.
Недостаток данного устройства заключается в том, что оно не позволяет производить прием и выгрузку груза с транспортного средства, если его уровень не совпадает с уровнем устройства.
Цель изобретения - обеспечение регулирования высоты секции рамы при приеме и выгрузке груза и повышение производительности устройства.
Указанная цель достигается тем, что подъемно-перегрузочное устройство для штучных грузов, содержащее основание и раму, включающую две секции с приводными роликами, одна из которых связана с основанием посредством четырехзвенного механизма типа «нюренбергских ножниц и с приводом подъема-опускания, при этом приводные ролики каждой секции расположены во взаимно перпендикулярных плоскостях, снабжено закрепленными на основании двуплечими поворотными подпружиненными рычагами, плечи которых взаимодействуют с соответствующими секциями рамы.
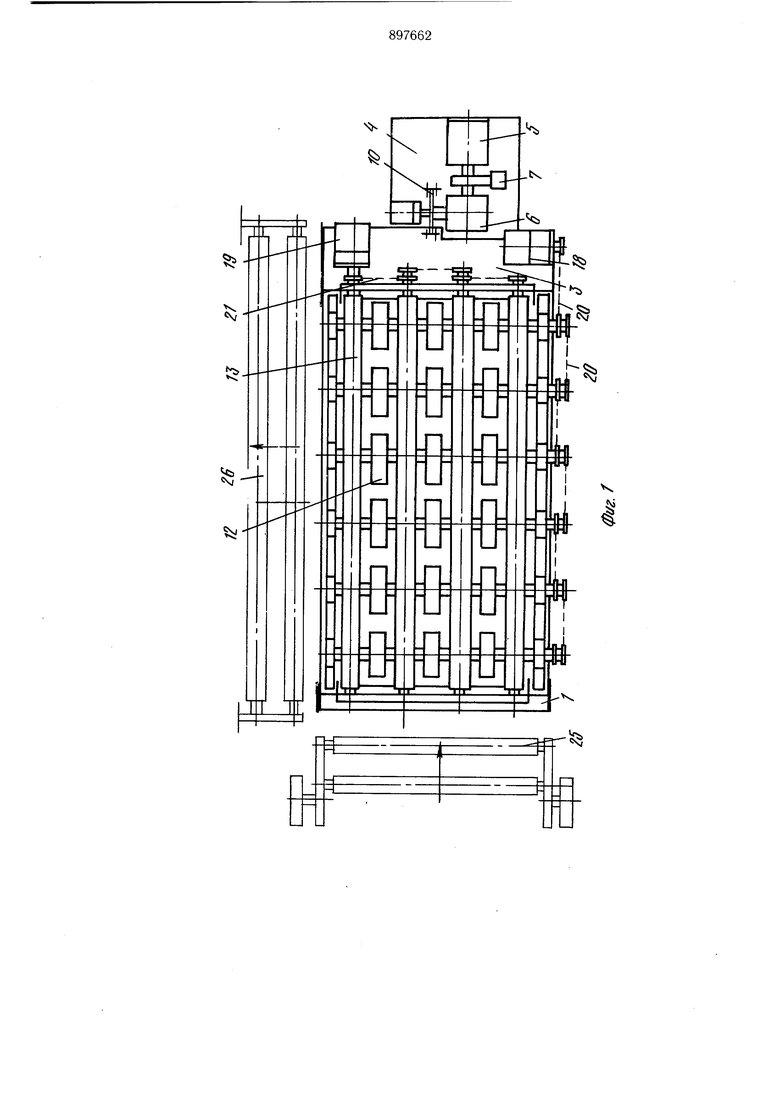
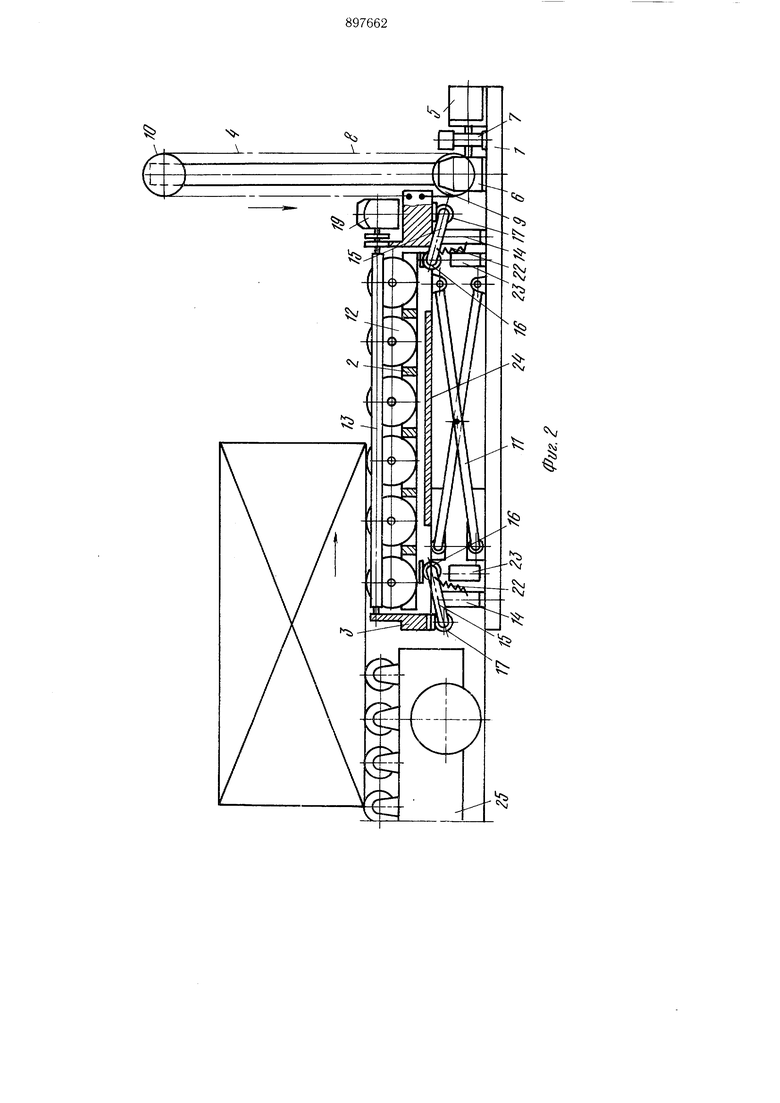
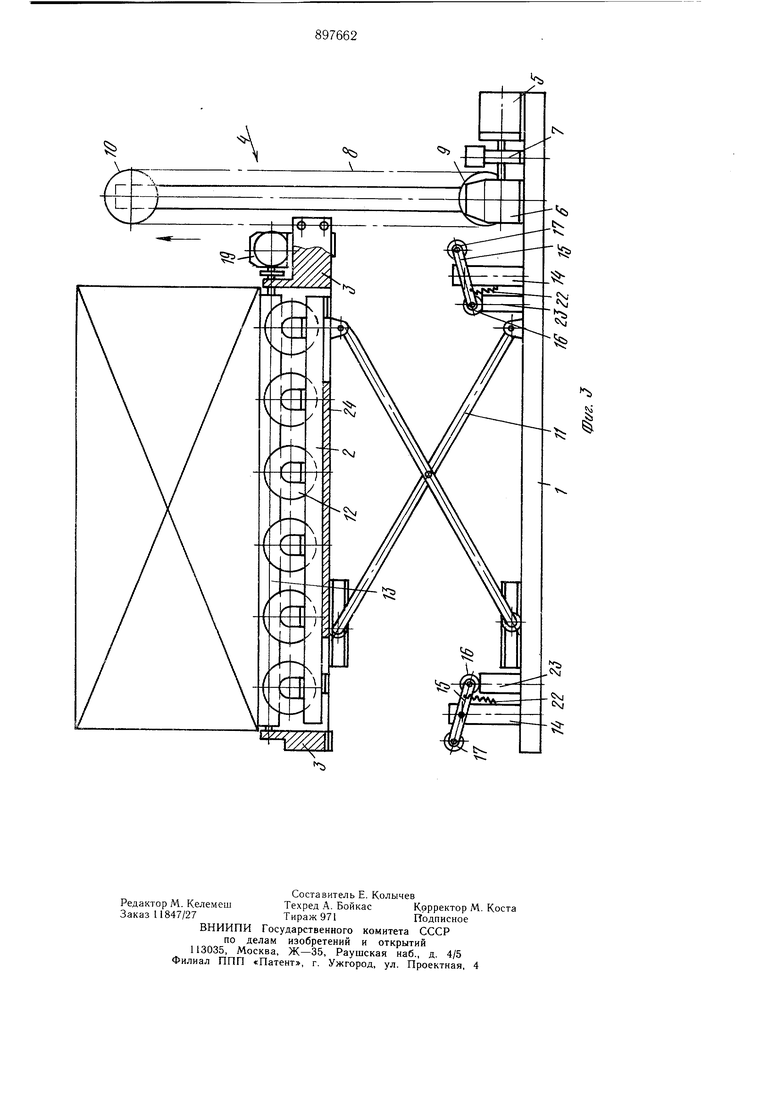
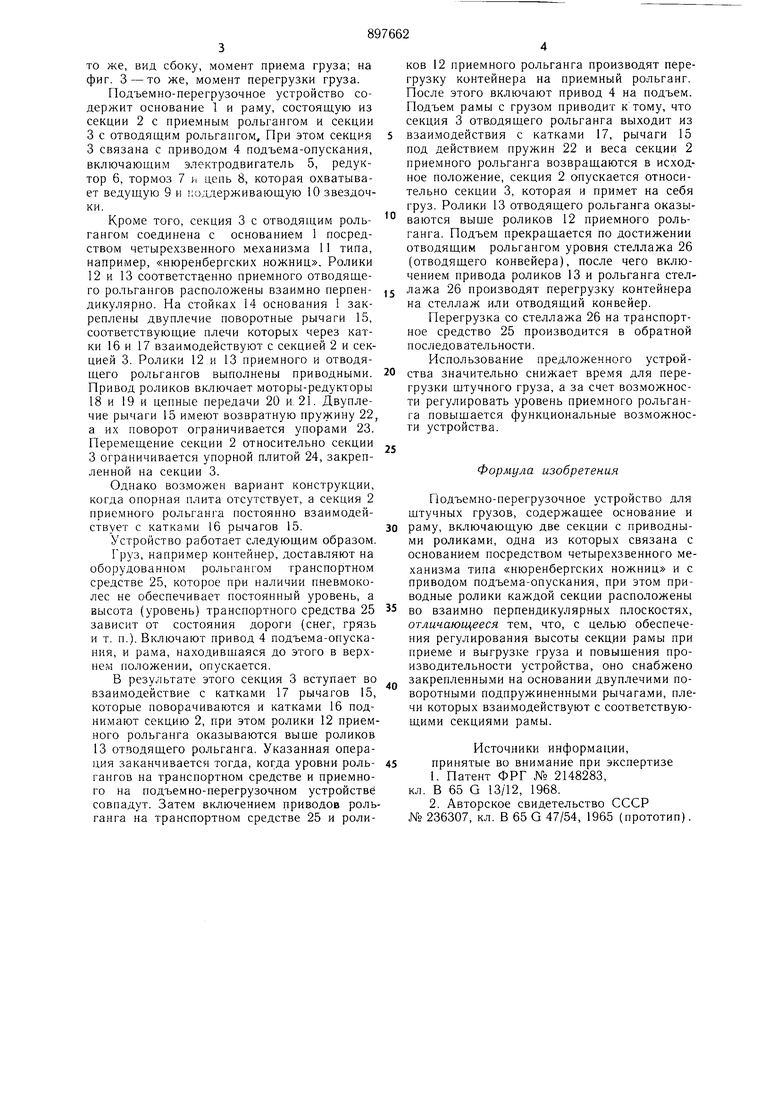
На фиг. 1 изображено предлагаемое устройство, общий вид (в плане); на фиг. 2 -
то же, вид сбоку, момент приема груза; на фиг. 3 - то же, момент перегрузки груза.
Подъемно-перегрузочное устройство содержит основание 1 и раму, состоящую из секции 2 с приемным рольгангом и секции 3 с отводящим рольгангом. При этом секция 3 связана с приводом 4 подъема-опускания, включающим электродвигатель 5, редуктор 6, тормоз 7 h цепь 8, которая охватывает ведущую 9 и поддерживающую 10 звездочки.
Кроме того, секция 3 с отводящим рольГангом соединена с основанием 1 посредством четырехзвенного механизма 11 типа, например, «нюренбергских ножниц. Ролики 12 и 13 соответственно приемного отводящего рольгангов расположены взаимно перпендикулярно. На стойках 14 основания 1 закреплены двуплечие поворотные рычаги 15, соответствующие плечи которых через катки 16 и 17 взаимодействуют с секцией 2 и секцией 3. Ролики 12 и 13 приемного и отводящего рольгангов выполнены приводными. Привод роликов включает моторы-редукторы 18 и 19 и цепные передачи 20 и. 21, Двуплечие рычаги 15 имеют возвратную пружину 22 а их поворот ограничивается упорами 23. Перемещение секции 2 относительно секции 3 ограничивается упорной плитой 24, закрепленной на секции 3.
Однако возможен вариант конструкции, когда опорная плита отсутствует, а секция 2 приемного рольганга постоянно взаимодействует с катками 16 рычагов 15. Устройство работает следующим образом. Груз, например контейнер, доставляют на оборудованном рольгангом транспортном средстве 25, которое при наличии пневмоколес не обеспечивает постоянный уровень, а высота (уровень) транспортного средства 25 зависит от состояния дороги (снег, грязь и т. п.). Включают привод 4 подъема-опускания, и рама, находивщаяся до этого в верхне.м положении, опускается.
В результате этого секция 3 вступает во взаимодействие с катками 17 рычагов 15, которые поворачиваются и катками 16 поднимают секцию 2, при этом ролики 12 приемного рольганга оказываются выше роликов 13 отводящего рольганга. Указанная операи,ия заканчивается тогда, когда уровни рольрангов на транспортном средстве и приемного на подъемно-перегрузочном устройстве совпадут. Затем включением приводов рольганга на транспортном средстве 25 и роликов 12 приемного рольганга производят перегрузку контейнера на приемный рольганг. После этого включают привод 4 на подъем. Подъем рамы с грузом приводит к тому, что секция 3 отводящего рольганга выходит из взаимодействия с катками 17, рычаги 15 под действием пружин 22 и веса секции 2 приемного рольганга возвращаются в исходное положение, секция 2 апускается относительно секции 3, которая и примет на себя груз. Ролики 13 отводящего рольганга оказываются выще роликов 12 приемного рольганга. Подъем прекращается по достижении отводящим рольгангом уровня стеллажа 26 (отводящего конвейера), после чего включением привода роликов 13 и рольганга стеллажа 26 производят перегрузку контейнера на стеллаж или отводящий конвейер.
Перегрузка со стеллажа 26 на транспортное средство 25 производится в обратной последовательности.
Использование предложенного устройства значительно снижает время для перегрузки штучного груза, а за счет воз.можности регулировать уровень приемного рольганга повышается функциональные возможности устройства.
Формула изобретения
Подъемно-перегрузочное устройство для штучных грузов, содержащее основание и раму, включающую две секции с приводными роликами, одна из которых связана с основанием посредством четырехзвенного механизма типа «нюренбергских ножниц и с приводом подъема-опускания, при этом приводные ролики каждой секции расположены во взаимно перпендикулярных плоскостях, отличающееся тем, что, с целью обеспечения регулирования высоты секции рамы при приеме и выгрузке груза и повышения производительности устройства, оно снабжено закрепленны.ми на основании двуплечими поворотными подпружиненными рычагами, плечи которых взаимодействуют с соответствующими секциями рамы.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 2148283, кл. В 65 G 13/12, 1968.
2.Авторское свидетельство СССР
№ 236307, кл. В 65 G 47/54, 1965 (прототип).
-Ч
5вз
сч
к
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-перегрузочное устройство для штучных грузов | 1981 |
|
SU988716A1 |
| Манипулятор для перегрузки штучных грузов | 1989 |
|
SU1643349A1 |
| Манипулятор для перегрузки штучных грузов | 1988 |
|
SU1535798A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1084211A1 |
| Подъемно-перегрузочное устройство | 1986 |
|
SU1460000A1 |
| КРАНОВЫЙ ЗАХВАТ | 1971 |
|
SU297565A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |