(54) МЕХАНИЗМ :бСЦИЛЛЯЦИИ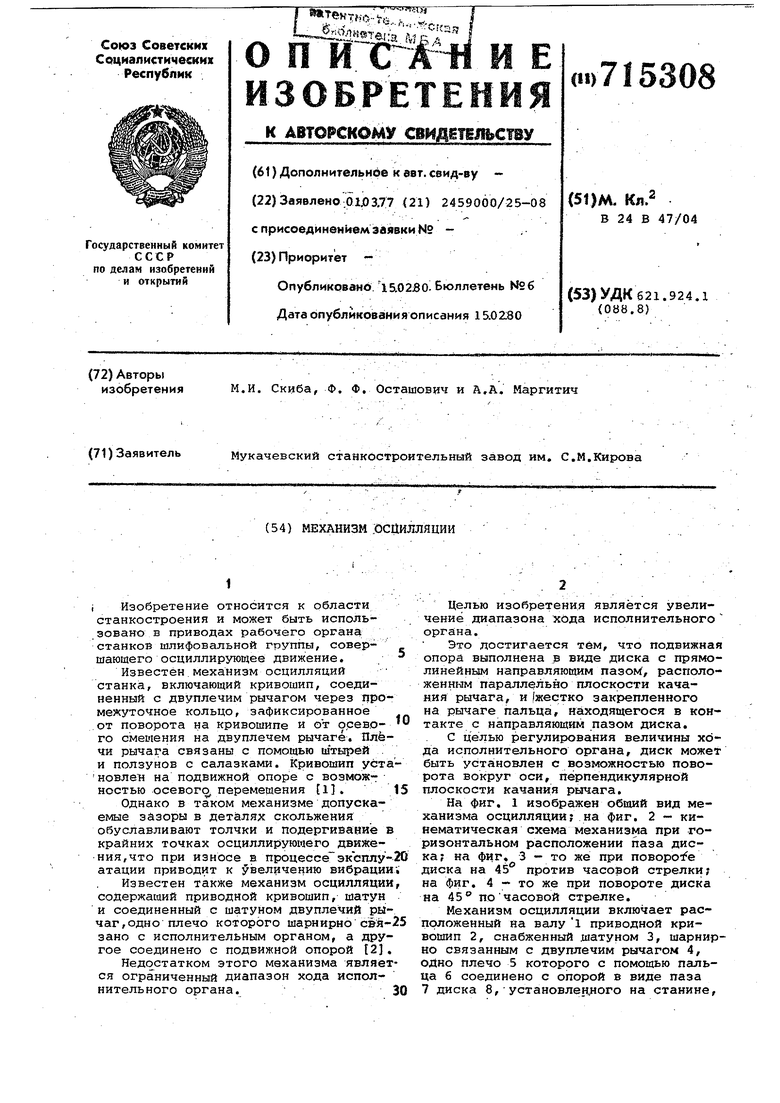
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| Приводной механизм контактора устройства регулирования напряжения трансформаторов под нагрузкой | 1977 |
|
SU730159A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Механизм осцилляции станка | 1980 |
|
SU942970A1 |
| Исполнительный механизм кривошипного пресса двойного действия | 1978 |
|
SU751650A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012497C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2018008C1 |
i
i Изобретение относится к области станкостроения и может быть использовано в приводах рабочего органа станков шлифовальной группы, совер- шающего осциллирующее движение.
Известен механизм осцилляции станка, включающий кривошип, соединенный с двуплечим рычагом через промежуточное кольцо, зафиксированное от поворота на кривошипе и от орево- го с:мешения на двуплечем рычаге. Плечи рычага связаны с помощью штырей . и ползунов с салазками. Кривошип установлет на подвижной опоре с возможностью осевого, перемещения 1. 15
Однако в таком механизме допускаемые зазоры в деталях скольжения обуславливают толчки и подергивание в крайних точках осциллирующего движения, что при износе в процессе эксплу-20 атации приводит к у величению вибрации;
Известен также механизм осцилляции, содержащий приводной кривошип, шатун и соединенный с шатуном двуплечий рычаг, одно плечо которого шарнирно свя-25 зано с исполнительным органом, а другое соединено с подвижной опорой 12.
Недостатком этого механизма является ограниченный диапазон хода исполнительного органа. 30
Целью изобретения является увеличение диапазона хода исполнительного органа.
Это достигается тем, что подвижная опора выполнена в виде диска с прямолинейным направляющим na30Nt, расположенным параллельно плоскости качания рычага, и (жестко закрепленного на рычаге пальца, находящегося в контакте с направляющим пазом диска.
С целью регулирования величины хода исполнительного органа, диск может быть установлен с возможностью поворота вокруг оси, перпендикулярной плоскости качания рычага.
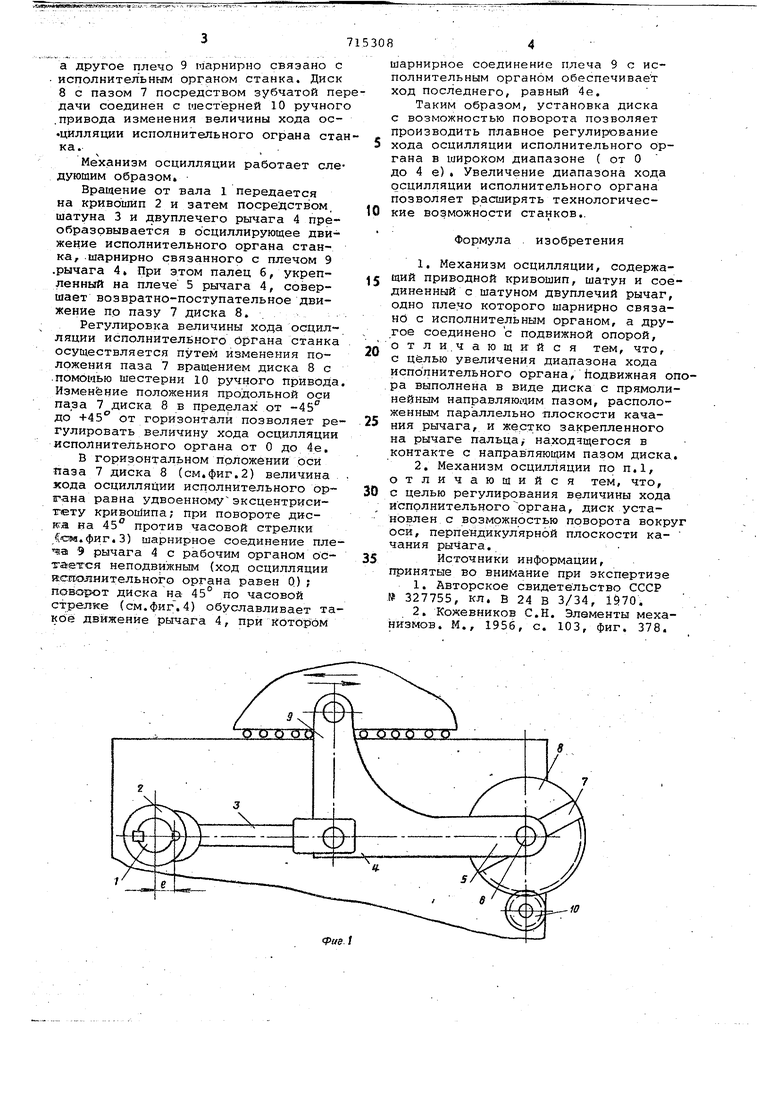
На фиг. 1 изображен общий вид механизма осцилляции; на фиг. 2 - кинематическая схема механизма при горизонтальном расположении паза диска; на фиг, 3 - то же при поворо е диска на 45° против часойой стрелки; на фиг. 4 - то же при повороте диска на 45 почасовой стрелке.
Механизм осцилляции включает расположенный на валу 1 приводной кривошип 2, снабженный диатуном 3, шарнирно связанным с двуплечим рычагом 4, одно плечо 5 которого с помощью пальца б соединено с опорой в виде паза 7 диска 8, установлен,ного на станине.
а другое плечо 9 гаарнирно связано с исполнительным органом станка. Диск 8 с пазом 7 посредством зубчатой передачи соединен с шестерней 10 ручного привода изменения величины хода осцилляции исполнительного ограна станка.,
Ме ханиэм осцилляции работает следующим образом.
Вращение от вала 1 передается на кривошип 2 и затем посредством, шатуна 3 и двуплечего рычага 4 преобразовывается в осциллирующее движение исполнительного органа станка, шарнирно связанного с плечом 9 рычага 4, При этом палец б, укрепленный на плече 5 рычага 4, совершает возвратно-поступательное движение по пазу 7 диска 8. .
Регулировка величины хода осцилляции исполнительного Органа станка осуществляется путем изменения положения паза 7 вращением диска 8с помощью шестерни 10 ручного привода. Изменение положения продольной оси паза 7 диска 8 в пределах от -45 до +45 от горизонтали позволяет регулировать величину хода осцилляции исполнительного органа от О до 4е,
В горизонтальном положений оси паза 7 диска 8 (см.фиг.2) величина хода осцилляции исполнительного органа равна удвоенномуэксцентриситету криво111ипа; при повороте диска на 45 против часовой стрелки ((ом.фиг. 3) шарнирное соединение плеча 9 рычага 4 с рабочим органом остгается неподвижным (ход осцилляции исполнительного органа равен 0); поворот диска на 45° по часовой стрелке (см.фиг.4) обуславливает такое движение рычага 4, при котором
шарнирное соединение плеча 9 с исполнительным органом обеспечивает ход последнего, равный 4е.
Таким образом, установка диска с возможностью поворота позволяет производить плавное регулирование хода осцилляции исполнительного органа в широком диапазоне ( от О до 4 е). Увеличение диапазона хода осцилляции исполнительного органа позволяет расширять технологические возможности станков..
Формула . изобретения
о т л ич ающий с я тем, что, с целью увеличения диапазона хода исполнительного органа, йодвижная опора выполнена в виде диска с прямолинейным направляю гдим пазом, расположенным параллельно плоскости качания рычага, и жестко закрепленного на рычаге пальца/ находящегося в контакте с направляющим пазом диска.
Источники информации, принятые во внимание при экспертизе
2,Кожевников С.Н. Элементы механизмов. М., 1956, с. 103, фиг. 378.
