(54) МЕХАНИЗМ ОСЦИЛЛЯЦИИ СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм осцилляции | 1977 |
|
SU715308A1 |
| Привод осциллирующего движения каретки шлифовального шпинделя | 1982 |
|
SU1038207A1 |
| Рычажный механизм управления для автодорожного шасси с ходоуменьшителем | 1990 |
|
SU1729840A1 |
| СПОСОБ КОМБИНИРОВАННОЙ ОБРАБОТКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019383C1 |
| Держатель литейных форм | 1975 |
|
SU682113A3 |
| КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗЛ\ С КАЧАЮЩИМСЯ | 1973 |
|
SU396235A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИГОЛЬНИЦЫ ВЯЗАЛЬНОЙ МАШИНЫ | 1991 |
|
RU2031998C1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Устройство для суперфиниширования | 1975 |
|
SU704764A1 |
| Устройство для круговой осцилляции рабочего инструмента | 2021 |
|
RU2764452C1 |
Изобретение относится к станкостроению и предназначено для сообщения возвратно-поступательного перемещения узлов в станках преимущественно щлифовальной группы.
Известен механизм осцилляции станка, содержащий осциллирующий орган с приводом, реверс и устройство регулирования параметров осцилляции, включающее звено с пазом переменного сечения, вал, свободно расположенный в пазу палец, механизм перемещения пальца вдоль паза, рычажный механизм и кулачок.
Однако для известного технического рещения характерно больщое число кинематически связанных звеньев, что обуславливает повыщенную сложность конструкции, потери на трение, повыщенную технологическую точность изготовления.
Целью изобретения является упрощение механизма осцилляции.
Указанная цель достигается тем, что осциллирующий орган связан посредством рычажного механизма с устройством регулирования параметров осцилляции, звено с
пазом этого устройства выполнено в виде соединенной с реверсом втулки с пазом вдоль ее оси, палец жестко связан с валом, а механизм перемещения пальца вдоль паза выполнен в виде закрепленного на валу опорного элемента, установленного с возможностью контакта с кулаком.
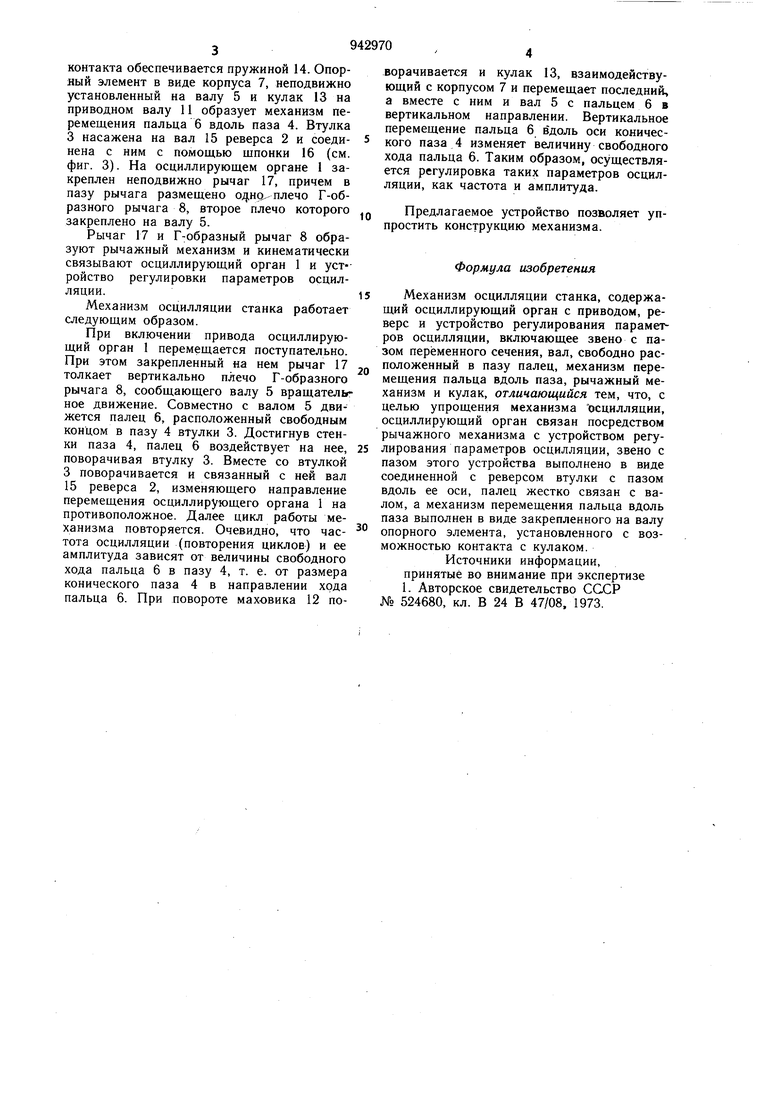
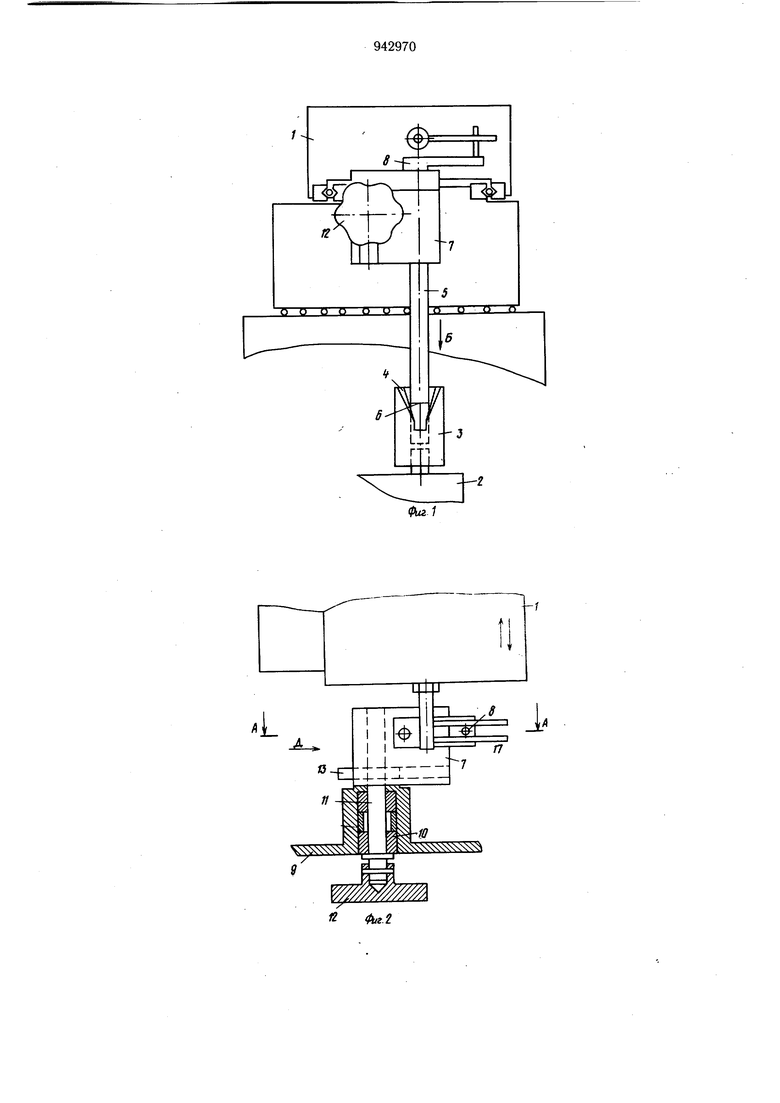
На фиг. 1 изображен механизм осцилляции, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на
10 фиг. 2; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - вид Д на фиг. 2.
Механизм осцилляции содержит осциллирующий орган 1 с гидроприводом (не показан), реверс 2 и устройство для регулировки параметров осцилляции, включающее втулку 3 с коническим пазом 4, вал 5, на одном конце которого закреплен свободно расположенный в отверстии втулки палец 6, а на другом - опорный элемент в виде корпуса 7 и Г-образный рычаг 8.
20 На станине 9 в подщипниках 10 смонтирован приводной вал 11 с маховиком 12 и кулачком 13 (см. фиг. 2 и фиг. 4), контактирующим с корпусом 7. Постоянство контакта обеспечивается пружиной 14. Опорный элемент в виде корпуса 7, неподвижно установленный на валу 5 и кулак 13 на приводном валу 11 образует механизм перемещения пальца б вдоль паза 4. Втулка 3 насажена на вал 15 реверса 2 и соедийена с ним с помощью щпонки 16 (см. фиг. 3). На осциллирующем органе 1 закреплен неподвижно рычаг 17, причем в пазу рычага размещено о нд-плечо Г-образного рычага 8, второе плечо которого закреплено на валу 5. Рычаг 17 и Г-образный рычаг 8 образуют рычажный механизм и кинематически связывают осциллирующий орган 1 и уст-ройство регулировки параметров осцилляции. Механизм осцилляции станка работает следующим образом. При включении привода осциллирующий орган 1 перемещается поступательно. При этом закрепленный на нем рычаг 17 толкает вертикально плечо Г-образного рычага 8, сообщающего валу 5 вращательное движение. Совместно с валом 5 движется палец б, расположенный свободным концом в пазу 4 втулки 3. Достигнув стенки паза 4, палец б воздействует на нее, поворачивая втулку 3. Вместе со втулкой 3 поворачивается и связанный с ней вал 15 реверса 2, изменяющего направление перемещения осциллирующего органа 1 на противоположное. Далее цикл работы механизма повторяется. Очевидно, что частота осцилляции (повторения циклов) и ее амплитуда зависят от величины свободного хода пальца б в пазу 4, т. е. от размера конического паза 4 в направлении хода пальца б. При повороте маховика 12 поворачивается и кулак 13, взаимодействующий с корпусом 7 и перемещает последний, а вместе с ним и вал 5 с пальцем 6 в вертикальном направлении. Вертикальное перемещение пальца 6 вдоль оси конического паза 4 изменяет величину свободного хода пальца б. Таким образом, осуществляется регулировка таких параметров осцилляции, как частота и амплитуда. Предлагаемое устройство позволяет уппростить конструкцию механизма. Формула изобретения Механизм осцилляции станка, содержащий осциллирующий орган с приводом, реверс и устройство регулирования параметров осцилляции, включающее звено с пазом переменного сечения, вал, свободно расположенный в пазу палец, механизм перемещения пальца вдоль паза, рычажный механизм и кулак, отличающийся тем, что, с целью упрощения механизма осцилляции, осциллирующий орган связан посредством рычажного механизма с устройством регулирования параметров осцилляции, звено с пазом этого устройства выполнено в виде соединенной с реверсом втулки с пазом вдоль ее оси, палец жестко связан с валом, а механизм перемещения пальца вдоль паза выполнен в виде закрепленного на валу опорного элемента, установленного с возможностью контакта с кулаком. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 524680, кл. В 24 В 47/08. 1973.
L
А
о.
It
3 i.
- /7
,
